基于 Proe的某种光纤连接器的夹持机构的设计
2016-05-30雷艇
雷艇


摘 要:在光配线领域,传统的光纤链路的频繁切换是通过人工插拔光纤连接器实现的,因此对光纤的跳接引入自动化设备具有重大的现实意义。本文主要研究的是该自动化设备的末端执行机构,即光纤连接器的夹持机构,针对光纤连接器体积小,质量轻的特点,设计一种由步进电机驱动、螺母丝杠传动、斜楔夹紧的机构,该机
构利用 Proe的零件设计、组件装配等相对独立的功能模块三维建模。关键词:光纤连接器;夹持机构;Proe;三维建模
1 前言
传统的二维 AutoCAD设计思路 [1],不仅绘图工作量大,图纸的设计修改工作也非常繁琐, Proe是美国 PTC公司推出的一款集 CAD/CAM/CAE功能于一体的综合性三维软件 [2],它是基于特征的全参数化软件,创建的零件模型、装配模型以及工程图之间是全相关的,就是说零件和组件做的任何更改,在工程图中都能够反应出来,它的各个功能模块相对独立,能将设计的结构迅速转化成具体的模型。
2 工作原理
光纤连接器可夹持部分的宽度为 8.94mm,高度为 7.32mm,长度为 9.5mm,设计的夹持机构的手指的宽度大于等于 8.94mm,两根手指夹紧时的最小距离不大于 7.32mm,手指的长度根据夹紧力与力矩之间的关系计算。该夹持机构由丝杠、螺母、滑块、上下斜楔、上下连杆、上下手指、上下手杆等组成,具体见图 1。其工作原理分为 2个阶段:
2.1 夹紧阶段
步进电机正转,通过联轴器带动丝杠正转,螺母在丝杠的带动下向左侧移动,由于螺母与滑块连接成为一个整体,滑块也沿着导轨水平向左滑动,而滑块上下两侧有 T字形凸台正好镶嵌在上斜楔和下斜楔的 T字形凹槽内,滑块的左侧滑动会拉近上下斜楔之间的竖直距离,从而带动上下连杆、上下手指、上下手杆相向移动,即开始夹紧动作。
2.2 松开阶段
步进电机反转,通过联轴器带动丝杠反转,螺母在丝杠的带动下向右侧移动,此时滑块也沿着导轨水平向右滑动,滑块两侧的 T字形凸台对上下斜楔分别有一个向外侧的挤出力,上下斜楔的距离被拉大,此时上下连杆、上下手指、上下手杆反向移动,即开始松开动作。
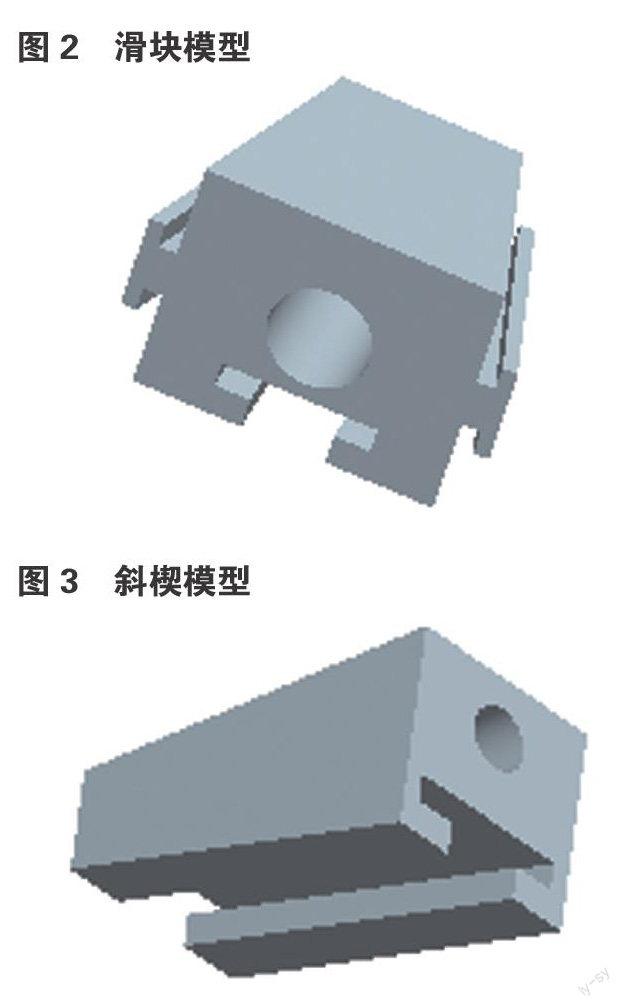
3 三维建模
该夹持机构的建模难点在于滑块和上下斜楔 3个零件的建模,滑块 +斜楔机构作为核心零部件,建模过程中要重点考虑滑块建模的整体尺寸, T字形凸台和 T字形凹槽的配合尺寸,滑块的整体尺寸过大,会导致整个夹持机构的体积变大;滑块的整体尺寸偏小,会出现滑块移动到极限位置后,手指还未夹紧光纤连接器的情况。 T字形凸台和 T字形凹槽要采用间隙配合,并且其接触面一定要保证光滑,表面粗糙度为 1.6及以下,若接触面配合过紧,表面粗糙度过大,则滑块很有可能推不动斜楔,手指也就无法完成夹紧和松开动作。滑块三维建模的一般步骤为:
(1)拉伸基础特征,即拉伸梯形平台,基础特征是零件的轮廓,是添加其他特征的基础,该梯形平台可以采用混合特征的方法生成,也可以采用先拉伸一个长方体,然后拉伸切除 2个斜面,( 2)打过孔,丝杠要穿透滑块,该过孔也可以理解为丝杠的避让孔,孔径要大于丝杠的直径,( 3)创建 T字形凸台的基准平面,该基准平面要与步骤( 1)创建的斜面垂直,( 4)在基准平面上草绘 T字形,用拉伸命令将 T字形拉出实体,再拉伸切除多余的 T字形材料,( 5)拉伸切除 T字形凹槽,滑块的凹槽要在导轨滑动,因而要保证间隙配合,( 6)新建上斜楔和下斜楔模型,二者实质上是一个模型,具体步骤不再赘述,( 7)新建一个组件模型,将 1个滑块和 2个斜楔装配在组件里,输出组件的工程图,其装配图如图 4所示。
传动机构之所以选择螺母丝杠,是因为其能将电机的旋转运动转化为直线运动,且螺母丝杠传动平稳、精度高、摩擦阻力小、传动效率高。螺母丝杠已经成为标准件,供应商已将不同型号不同尺寸的螺母丝杠建立标准化模型,我们可以直接调用。在这里我们选用直径为 12mm的丝杠。
连杆的作用是将斜楔的动力传递到手杆,手指是起限位和加强手杆强度的作用。连杆、手指和手杆由于 3个零件通过螺栓连接,因此我们可以采用在组件中创建零件模型的建模方法:( 1)新建一个组件模型,单击组件模式下创建元件按钮,在元件创建对话框中类型选择零件,子类型选择实体,给该零件命名为 prt001,(2)在模型树中右击 prt001,选择激活,此时组件模型的工作环境进入了零件模型的工作环境,( 3)利用拉伸特征生成连杆,( 4)继续单击组件模式下创建元件按钮,重复上面的步骤可以生成手指和手杆。这种建模方法的好处是后一个零件在建模时可以直接把前一个零件的特征作为参照图元。
4 总结
该夹持机构结构紧凑、运行平稳,且由步进电机驱动能控制夹紧精度, Proe对零件的三维建模能充分发挥对零件的结构设计,装配图有助于我们理解夹持机构的工作原理,且 Proe各功能模块独立,模型与工程图全相关,能迅速将我们的设计思路转化成实际的模型。该夹持机构的设计为光配线自动化设备的研发起到铺垫作用,也对其他类似结构具有借鉴意义。
参考文献:
[1]于国跃,丁勇 .Proe在耙吸挖泥船吊架设计分析中的应用 [J].船舶:2014年 04期 .
[2]詹友刚 .Proe野火版 5.0机械设计教程 [M]. 北京:机械工业出版社,2010.7.
