外骨骼助行机器人的人机耦合运动特性*
2016-05-30李荣华张连东
陈 勇,李荣华,张连东
(大连交通大学机械工程学院,辽宁大连116028)
外骨骼助行机器人的人机耦合运动特性*
陈勇,李荣华,张连东
(大连交通大学机械工程学院,辽宁大连116028)
摘要:利用Motion Analysis三维动作捕捉分析系统,实时记录人体在平地行走的运动过程,获得了步态参数,通过分组对比,研究了老年人的行走特点。根据老年人的运动特性,设计了一种老年人外骨骼助行机器人,建立了穿戴者与外骨骼助行机器人的人机耦合模型,研究了人机耦合运动特性,为外骨骼助行机器人的耦合仿生设计提供了运动学基础。
关键词:外骨骼助行机器人人机耦合运动特性老年人仿生设计
0引言
衰老是不可抗拒的自然规律,中国的老龄化进程逐步加快,预计到2020年,60岁及以上的老年人将达到2.48亿,占全国总人口15.26%[1]。老年人各种生理机能和运动机能都衰退,不同程度地丧失了运动能力和生活能力,不得不长期卧床,经常会导致褥疮、泌尿系统感染、静脉血栓、骨质疏松等并发症的发生,在身心方面长年忍受着常人体会不到的痛苦,给家庭和社会带来了巨大的负担[2-4]。外骨骼助行机器人是一种生物-机械-电子装置[5-7],将其穿戴在老年人的腿上,可以帮助老年人重新站立行走,恢复运动能力和生活能力,促进血液循环,防止肌肉萎缩。国内外学者对外骨骼助行机器人开展的研究主要集中在智能控制[8-10]、几何约束[11-13]和稳定性[14-16]方面。Nilsson等人研制了一种外骨骼助行机器人,用于协助步态紊乱的使用者行走,采用角度传感器、肌电传感器和地面接触力传感器来获得状态信息,进行人体姿态的控制[17]。Henning等人针对脊髓损伤和中风患者研制了一种可穿戴式助行机器人,根据每个使用者不同的身体要求,将各个传感器检测的数据传给控制系统,调整到最合适的力量和步行速度[18]。Jezernik等人研制了截瘫患者的助行机器人,根据不同使用者对标准步态抵触情况实时地修正步态,实现人机系统的协调运动[19]。江济良等人针对老年人和残疾人的用户群体,提出了室内移动服务机器人的人机耦合协同作业机制,较好地完成了作业任务[20]。沈林勇等人检测了下肢步行康复机器人的人机耦合力,为实现下肢步行康复机器人的操作者主动参与和康复机器人的主动控制建立了基础[21]。杜鹤民等人根据映射关系实现信息产品的人机耦合,实现了较好的人机交互[22]。国内外学者的以往研究,缺乏对穿戴者与外骨骼助行机器人耦合关系的足够认识,需要进一步的深入研究。将老年人的运动特性与外骨骼助行机器人耦合起来,研制符合老年人运动特性的外骨骼助行机器人,为提高人机耦合系统的运动性能提供一种仿生设计思路。
1老年人行走步态的研究
1.1测试对象
采用随机抽样法确定测试对象,按照年龄和性别分为12组:男性20-29岁、男性30-39岁、男性40-49岁、男性50-59岁、男性60-69岁、男性70-80岁、女性20-29岁、女性30-39岁、女性40-49岁、女性50-59岁、女性60-69岁、女性70-80岁,测试对象的基本情况如表1所示,数据用均值±标准差表示。所有测试对象的身体健康,均无肌肉、骨骼、神经和心肺疾病,不影响正常的行走姿态。在测试开始前,向每位测试对象解释本次测试的步骤、目的和注意事项,采用自愿的形式,征得测试对象签字同意。
表1
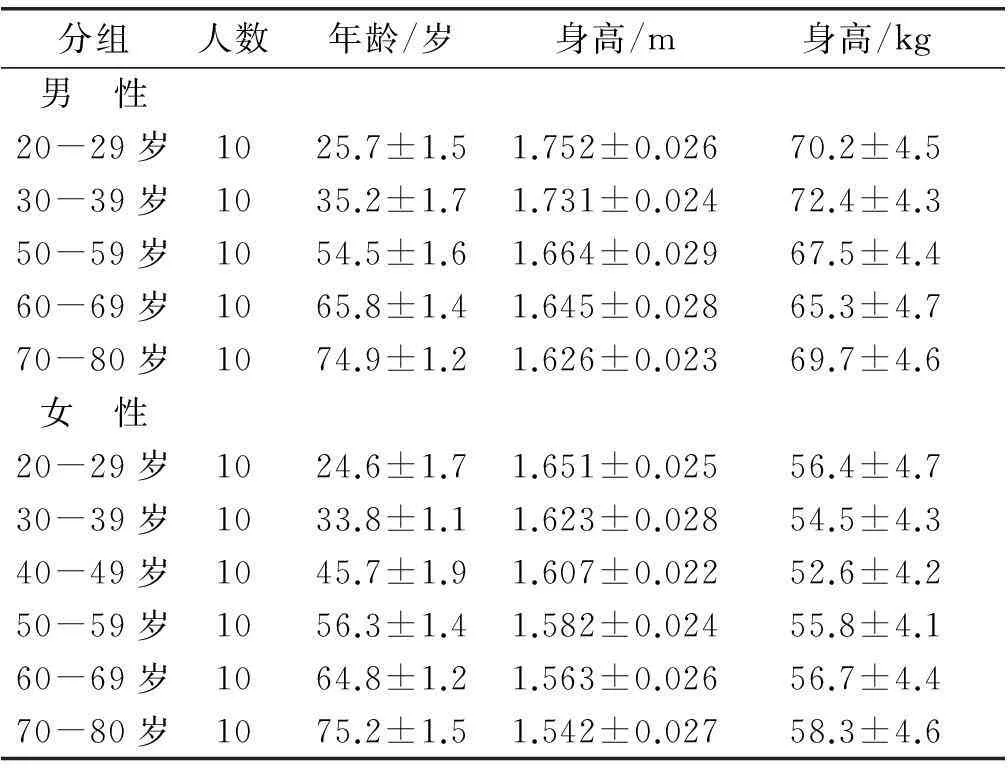
测试对象的基本情况
1.2研究方法
利用Motion Analysis三维动作捕捉分析系统,实时记录测试对象在平地行走的步态数据。调整镜头的空间位置和拍摄范围,保证完整记录测试对象每次行走的5-6个周期的步态。测试数据采用SPSS19.0软件进行分析,同年龄组不同性别的步态参数进行t检验,同性别不同年龄组的步态参数进行单因素方差分析,设定显著性水平为P<0.05。
1.3步态参数
人体行走时,一侧足跟与另一侧足跟的前后距离称为步长;一侧足跟着地到该侧足跟再次着地的时间称为步态周期;一侧下肢为全脚掌着地、另一侧下肢摆动的时间称为单足支撑时间;两侧下肢均为全脚掌着地的时间称为双足支撑时间。测试对象的步态参数如表2所示,数据用均值±标准差表示。
表2
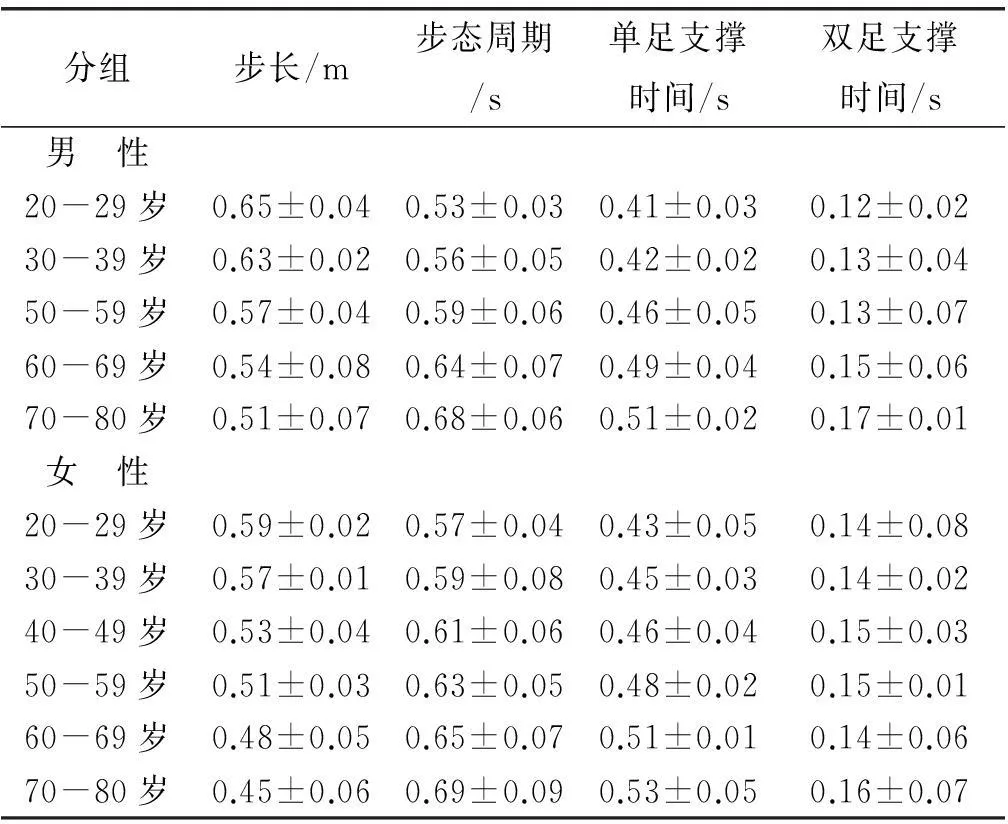
测试对象的步态参数
在表2中,随着年龄的增长,男性和女性的步长呈现减小的趋势,步态周期呈现增大的趋势,单足支撑时间呈现延长的趋势,这是由于老年人的下肢功能下降,肌肉能力衰退,脚掌着地动作缓慢,通过一侧下肢支撑时间的延长来平衡老年人的不对称能力,以免发生摔倒,体现出老年人的行走特点是“求稳不求快”。
2人机耦合特性分析
2.1结构模型
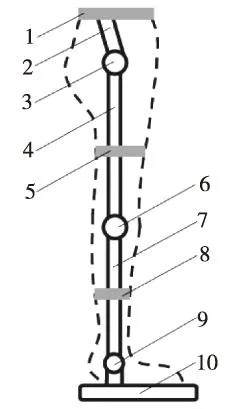
图1 外骨骼助行机器人的结构示意图
相对于年青人来说,老年人的单足支撑时间和双足支撑时间占步态周期的比例增大,老年人的下肢关节要承受更大的力,老年人的身体特征和生理机能导致了行走困难,需要帮助老年人减轻站立时下肢的负重,增加老年人行走时下肢的驱动力,实现辅助行走。老年人行走的主要运动是下肢关节的屈伸运动,老年人行走的主要特点是关节的活动范围降低。参考老年人的下肢结构和关节的运动范围,根据仿生学原理,设计了一种老年人外骨骼助行机器人。如图1所示,主要组成:外骨骼助行机器人的躯干部件,用于连接至穿戴者下半身,辅助穿戴者完成站立和行走,包括髋关节连杆2、大腿连杆4、小腿连杆7以及脚板10;外骨骼助行机器人的关节部件,用于连接外骨骼助行机器人的躯干部件,使得外骨骼助行机器人的躯干部件之间实现弯曲和伸展,包括连接穿戴者腰部与大腿连杆4的髋关节部件3,连接大腿连杆4与小腿连杆7的膝关节部件6,连接小腿连杆7与脚板10的踝关节部件9;外骨骼助行机器人的辅助部件,包括绑在穿戴者腰部并固定连接于髋关节连杆2的腰带1,绑在穿戴者大腿上并固定连接于大腿连杆4的大腿绷带5,绑在穿戴者小腿上并固定连接于小腿连杆7的小腿绷带8。
老年人穿戴外骨骼助行机器人时,首先测量老年人大腿和小腿的长度,调整外骨骼助行机器人大腿连杆4和小腿连杆7的长度,保证外骨骼助行机器人髋关节、膝关节和踝关节的旋转轴与老年人穿戴者相应的关节轴重合。通过腰带1将老年人穿戴者与髋关节连杆2连接在一起,利用大腿绷带5将老年人穿戴者的大腿与外骨骼助行机器人的大腿连杆4连接在一起,利用小腿绷带8将老年人穿戴者的小腿与外骨骼助行机器人的小腿连杆7连接在一起。启动髋关节连杆2的电源,驱动髋关节部件3,带动大腿连杆4绕髋关节部件3进行转动,大腿连杆4和小腿连杆7绕膝关节部件6进行转动,小腿连杆7绕踝关节部件9进行转动,从而实现外骨骼助行机器人向前迈步,对老年人穿戴者进行辅助行走。
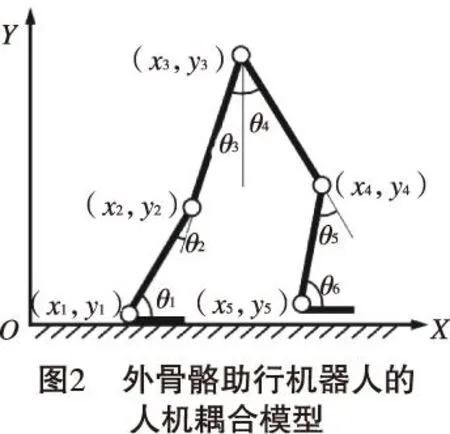
2.2人机耦合模型
在运动过程中,穿戴者与外骨骼助行机器人耦合为一个整体,如图2所示,θ1是支撑腿的踝关节角度,θ2是支撑腿的膝关节角度,θ3是支撑腿的髋关节角度,θ4是摆动腿的髋关节角度,θ5是摆动腿的膝关节角度,θ6是摆动腿的踝关节角度,(x1,y1)是支撑腿的踝关节坐标,(x2,y2)是支撑腿的膝关节坐标,(x3,y3)是髋关节坐标,(x4,y4)是摆动腿的膝关节坐标,(x5,y5)是摆动腿的踝关节坐标。
各个关节角度的计算公式为:
(1)
(2)
(3)
(4)
(5)
(6)
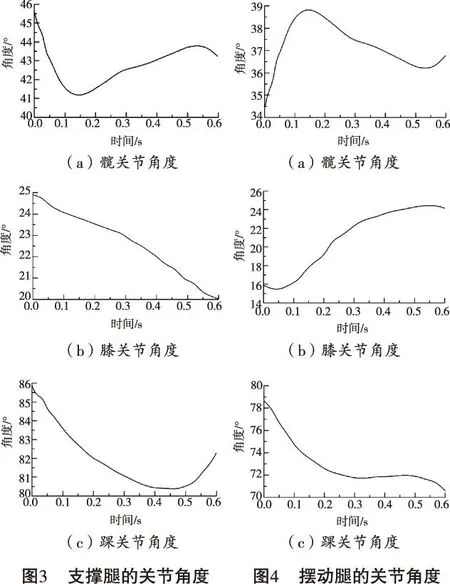
在参加步态实验的测试对象中,随机选取40名老年人穿戴外骨骼助行机器人,利用Motion Analysis三维动作捕捉分析系统,实时记录老年人穿戴外骨骼助行机器人在平地行走时的运动视频。从Motion Analysis三维动作捕捉分析系统所得到的运动视频中,按照0.1 s的时间间隔解析成一系列运动图像,在每个时刻的运动图像中,根据公式(1)-(6)得到不同时刻的各个关节角度,研究老年人穿戴外骨骼助行机器人在平地行走时的人机耦合运动特性。由于篇幅有限,只对其中1名老年人(男性,55岁,身高1.68 m,体重67 kg)穿戴外骨骼助行机器人在平地行走的运动视频进行解析,得到1个步态周期支撑腿和摆动腿的关节角度,如图3和图4所示。
从图3和图4可以得出,老年人穿戴外骨骼助行机器人在平地行走的耦合运动过程中,髋关节的运动范围为34.5°~45.5°,膝关节的运动范围为16.8°~24.8°,踝关节的运动范围为70.6°~85.8°,为外骨骼助行机器人的耦合仿生设计提供了运动学基础。
3结论
1) 对人体在平地行走的运动步态进行了研究,结果表明:随着年龄的增长,老年人的下肢功能下降,肌肉能力衰退,脚掌着地动作缓慢,从而导致了步长的减小、步态周期的增大、单足支撑时间的延长,通过一侧下肢支撑时间的延长来平衡老年人的不对称能力,避免发生摔倒。
2) 对老年人穿戴外骨骼助行机器人的人机耦合运动特性进行了分析,结果表明:髋关节的运动范围为34.5°~45.5°,膝关节的运动范围为16.8°~24.8°,踝关节的运动范围为70.6°~85.8°,为外骨骼助行机器人的耦合仿生设计提供了运动学基础。
参考文献
[1]Ku L E, Liu L F, Wen M J. Trends and determinants of informal and formal care giving in the community for disabled elderly people[J]. Archives of Gerontology and Geriatrics, 2013, 56(2): 370-376.
[2]Kao P C, Srivastava S. Effect of robotic performance-based error-augmentation versus error-reduction training on the gait of healthy individuals[J]. Gait & Posture, 2013, 37(1): 113-120.
[3]Giorgio C, Dino A, Fabrizio S. A novel compact torsional spring for series elastic actuators for assistive wearable robots[J]. Journal of Mechanical Design, 2012, 134(12): 67-75.
[4]Arnold E, Ward S, Lieber R. A model of the lower limb for analysis of human movement [J]. Annals of Biomedical Engineering, 2010, 38(2): 269-279.
[6]Peters A, Galna B, Sangeux M. Quantification of soft tissue artifact in lower limb human motion analysis: a systematic review[J]. Gait & Posture, 2010, 31(1): 1-8.
[7]唐志勇, 谭振中, 裴忠才. 下肢外骨骼机器人动力学分析与设计[J]. 系统仿真学报, 2013, 25(6): 1338-1344.
[8]钟翠华, 沈林勇, 任昭霖. 基于DSP的助行外骨骼机器人步态控制[J]. 上海大学学报(自然科学版), 2012, 18(2): 151-155.
[9]杨秀霞,张毅,归丽华,等. 下肢携行外骨骼系统模糊自适应位置控制研究[J]. 计算机仿真, 2012, 29(3): 231-235.
[10]Tadej P, Andrej G, Tadej D. Control approaches for robotic knee exoskeleton and their effects on human motion[J]. Advanced Robotics, 2013, 27(13): 993-1002.
[11]王新亭,张峻霞,徐春. 基于步态参数的助行器设计方法[J]. 机械设计, 2013, 30(4): 97-99.
[12]刘放,程文明,邬钱涌. 基于弹簧阻尼系统的人体外骨骼背架结构研究[J]. 机械设计, 2013, 30(4): 60-64.
[13]韩亚丽, 王兴松. 下肢助力外骨骼的动力学分析及仿真[J]. 系统仿真学报, 2013, 25(1): 61-67.
[14]Samuel G, Philippe M, Wim D. Enhancing performance during inclined loaded walking with a powered ankle-foot exoskeleton[J]. Annals of Biomedical Engineering, 2014, 114(11): 2341-2351.
[15]Miao Y J, Gao F, Pan D L. State classification and motion description for the lower extremity exoskeleton [J]. Journal of Bionic Engineering, 2014, 11(2): 249-258.
[16]邵建兵,程文明,刘放,等. 五连杆外骨骼助力系统行走步态模型能量补偿[J]. 机械设计, 2015, 32(1): 24-29.
[17]Nilsson A, Vreede K S, Haglund V. Gait training early after stroke with a new exoskeleton-the hybrid assistive limb: a study of safety and feasibility[J]. Journal of Neuro Engineering and Rehabilitation, 2014, 9(11): 92-102.
[18]Henning S, Cordula W, Rolf B. Gait rehabilitation machines based on programmable footplates[J]. Journal of Neuro Engineering and Rehabilitation, 2007, 4(2): 22-29.
[19]Jezernik S, Colombo G, Morari M. Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotics prosthesis[J]. IEEE Transactions on Robotics and Automation, 2004, 20(3): 574-582.
[20]江济良,屠大维,张国栋,等. 基于认知模型的室内移动服务机器人人机耦合协同作业机制[J]. 智能系统学报, 2012, 7(3): 251-258.
[21]沈林勇,章亚男,钱晋武. 下肢步行康复训练机器人的人机耦合力检测:三网融合技术国际研讨会论文集[C]. 三网融合技术国际研讨会, 2012.
[22]杜鹤民,余隋怀. 基于人机耦合思想的信息产品设计方法研究[J]. 机械设计, 2013, 30(1): 104-106.
Man-machine coupling kinematics of the walking-aid exoskeleton robot
CHEN Yong, LI Ronghua, ZHANG Liandong
Abstract:In this study, the motions of human body while walking on level ground were captured in real-time by Motion Analysis system, the gait parameters were obtained, and the kinematic features of old people while walking were analyzed by group comparison. Based on the kinematic features of old people, a walking-aid exoskeleton robot was designed, the man-machine coupling model of the wearer and the exoskeleton robot was established, and the man-machine coupling kinematics were studied. This study could provide kinematic basis for the bionic design of walking-aid exoskeleton robots.
Keywords:walking-aid exoskeleton robot; man-machine coupling; kinematics; old people; bionic design
收稿日期:2015-08-30
作者简介:陈勇(1979-),男,吉林省吉林市人,副教授,博士学位,硕士生导师,主要研究方向为外骨骼助行机器人。
基金项目:国家自然科学基金项目(51305055),辽宁省高等学校杰出青年学者计划项目(LJQ2015018),辽宁省自然科学基金项目(2015020107)。
中图分类号:TH122
文献标识码:A
文章编号:1002-6886(2016)02-0001-05
