基于DSP28335的质子旋进式磁力仪控制系统设计与实现
2016-05-25赵鹤鸣乔东海杜爱民苏州大学电子信息学院苏州5006中国科学院声学研究所北京0090中国科学院地质与地球物理研究所北京0009
季 伟,赵鹤鸣,乔东海,杜爱民(. 苏州大学 电子信息学院,苏州 5006;. 中国科学院 声学研究所,北京 0090;. 中国科学院 地质与地球物理研究所,北京 0009)
基于DSP28335的质子旋进式磁力仪控制系统设计与实现
季 伟1,赵鹤鸣1,乔东海2,杜爱民3
(1. 苏州大学 电子信息学院,苏州 215006;2. 中国科学院 声学研究所,北京 100190;3. 中国科学院 地质与地球物理研究所,北京 100029)
摘要:质子旋进式磁力仪是依据质子的旋进频率来测量地磁场的仪器。文章在分析了国内外质子磁力仪发展现状的基础上,提出了以DSP28335为核心的新型质子旋进式磁力仪控制系统的设计方案,着重介绍了数字控制板的设计和测频关键技术。与以单片机、PIC为控制芯片的传统磁力仪不同,新设计旨在解决现有系统成本高、功能有限和硬件电路复杂等问题,并完成了原理样机的研制。最后在实验室内对关键的测频技术进行了针对性测试,测量精度达到国内先进水平。
关键词:质子旋进式磁力仪;DSP28335;测频;上位机软件
http://www.bisee.ac.cnE-mail: htqhjgc@126.comTel:(010)68116407, 68116408, 68116544
0 引言
磁法勘探是各种物探方法中理论比较成熟、应用时间最早、应用范围最广的方法。磁法勘探除直接用于寻找磁性矿体外,还广泛用于固体矿产、石油天然气构造的普查,大地构造研究,地质填图,工程地质等领域[1]。近年来,随着微电子技术与材料科学的进步,磁法勘探的基本设备——磁力仪和磁力梯度仪的性能也有很大进步,进而推动了磁法勘探应用范围的扩大[2]。
质子旋进式磁力仪是一种依据质子的旋进频率来测量地磁场强度的仪器,一般由探头、模拟信号处理电路、控制系统电路等3部分组成。其测量磁场的具体过程如下:在传感器探头中,装满了含有氢质子的液体溶液,氢质子的初始状态为无规则排列,当施加极化信号后,氢质子将沿极化磁场有规则地排列;极化信号消失后,质子将受到地磁场的影响做旋进运动并在感应电路上产生类似正弦信号的、幅度随时间按指数衰减的感应电动势,旋进的频率与磁场的大小成正比,通过测量感应信号的频率值即可得到外界磁场的大小。质子磁力仪就是根据这种原理设计的[3]。
早期的质子磁力仪系统大多采用纯模拟电路,只有部分控制电路采用少量数字电路,且所采用的主控芯片多以单片机、PIC等低端处理器为主。运算速度慢、精度不高、外设资源稀少等缺点限制了质子磁力仪的功能扩展。近年来,随着数字集成芯片的发展,渐渐有了以FPGA、ARM等高端处理器为核心的控制系统。其中FPGA系统可以完全实现硬件上的等精度测频,因而被广泛应用,但其成本较高。
本文提出了一种新型的质子旋进式磁力仪控制系统,采用DSP作为控制系统的核心处理器,使用其片上系统的ECAP(增强捕获)功能模块配合相应算法进行测频计算。与传统磁力仪相比,新型磁力仪大大简化了测频电路,同时DSP处理器的硬件乘法器也使控制系统的计算速度大幅度提高,而新型的小型集成芯片的应用,更使新仪器具有体积小、运算速度快、精度高、功耗低、功能多、操作简便等优点。
1 系统硬件电路
新设计的质子旋进式磁力仪的硬件系统包括传感器、模拟板电路、旋进频率测量电路、计算机控制系统、电源电路等,其总体框图见图1。
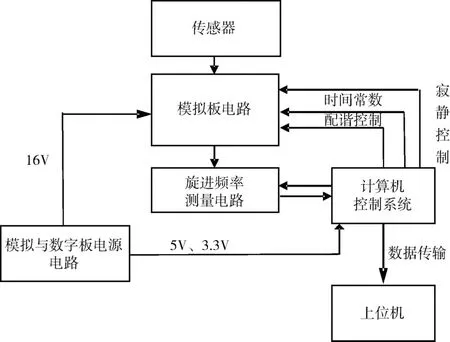
图1 质子旋进式磁力仪硬件总体框图Fig. 1 The hardware block diagram of proton precession magnetometer
1.1传感器探头
为了产生质子旋进信号,传感器探头中需要装有富含大量氢质子的液体,称作“样品”,如水、煤油、酒精、甘油等,它是传感器的核心。样品通常要选用稳定性好、绝缘、对漆包线和绝缘漆无腐蚀、无溶解作用、横向弛豫时间足够长的有机或无机物质[4],目前最常用的是航空煤油,为了取得更好的极化效果也可以使用几种液体的混合体。
传感器探头的形状一般为圆柱体,选用无磁性材料加工制作,探头外壳为全密封结构,同时选用2个反向串联的多层空芯线圈作为极化线圈[5]。本设计采用的传感器探头实物如图2所示。

图2 传感器探头Fig. 2 The sensor prober
1.2模拟电路板
由于质子在磁场中旋进所产生的感应电动势较弱,通常为µV级[6],且幅值随时间的推移呈指数衰减,所以对感应信号必须先进行放大、整形、锁相等处理,将其转换成可供数字控制系统测量的方波信号[7]。这一部分工作由模拟电路板(见图3)完成。
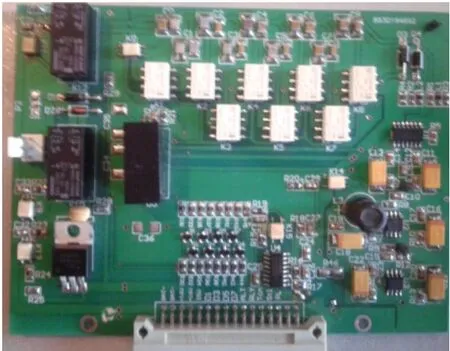
图3 模拟电路板Fig. 3 The analog circuit board
1.3计算机控制系统(控制电路板)
控制电路板是整个质子旋进式磁力仪的控制核心,也是本文介绍的重点。它主要包括以下功能:
1)控制模拟板的工作流程,进而获得经过模拟板放大、整形、锁相后的方波信号;
2)对模拟板输出的方波信号进行测频,之后计算出对应的磁场值;
3)人机交互,显示、存储并传输磁场数据至上位机;
4)提供RTC、GPS等辅助功能。
图4给出了数字控制电路板的整体框图以及其与模拟板之间的关系。控制系统以DSP28335为主控芯片,包含测频模块、存储模块、串口模块、显示模块、RTC模块、GPS模块和按键模块。
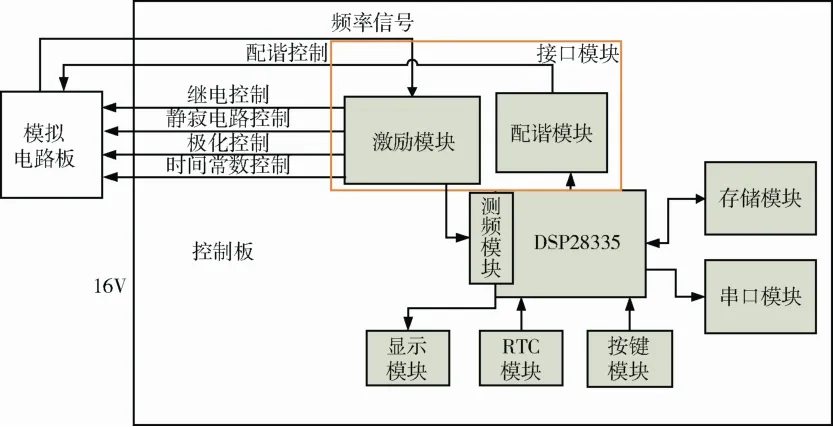
图4 数字控制电路板整体框图Fig. 4 The overall block diagram of control board
1.3.1主控芯片
本设计选用TI公司的DSP28335作为控制核心。相比于单片机、PIC等低端处理器,它具有精度高,外设丰富便于功能扩展,数据及程序存储量大等优点[8];相比于ARM,DSP芯片可实现等精度测频,且不需要额外的同步控制电路;相比于FPGA,DSP芯片可通过ECAP功能配合相应的算法实现等精度测频,且成本大大降低。
1.3.2测频模块
测频主要由DSP28335片上系统的ECAP功能独立完成,无需除芯片以外其他的同步电路,简化了电路设计。ECAP能够捕获外部输入引脚的电平变化,其功能如图5所示。
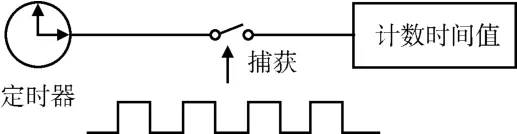
图5 ECAP捕获功能示意Fig. 5 Schematic diagram of function ECAP
本设计基于ECAP功能实现了对单周期测频法的改进,即通过测量多个单周期计数并经过设计的滤波算法进行后期处理来得到准确的计数值,实现了等精度测频。单次测频的具体过程如下:
当捕获单元捕获到信号的上升沿时,准确记录下此时定时器的计数值Tn1,当再次遇到上升沿后,再将此时的定时器值保存至Tn2,则当前标频周期计数值TN为Tn2-Tn1。假设此时定时器频率(标频)设置为RHz,显然被测信号的频率为R/TN。因为用于产生标频的是独立的专门配合ECAP的硬件定时器,完全以被测信号上升沿作为计数同步信号,解决了标频计数与被测信号不同步的问题。其他处理器要做到这一点往往需要额外的同步控制电路,而DSP28335并不需要,这也是选择该芯片的重要原因之一。在规定的闸门时间(约500ms)内连续测量多个周期计数值TN,最终通过设计的正态滤波算法(具体过程不在本文论述)得到本次的标频计数值,进而得到本次测量的频率值。本设计中标频定时器的频率被设定为150MHz,远大于被测旋进信号的频率范围(约超10000倍)。理论上频率值精度可以达到小数点后4位。
1.4存储模块
与传统磁力仪通过FLASH存储数据不同。为了方便数据的转移,本设计提供了USB接口,可用于连接USB设备进行存储操作,USB接口电路如图6所示。

图6 USB接口电路Fig. 6 USB interface circuit
1.5RTC模块
RTC时钟模块主要用于实时记录测量磁场时当地的时间,本设计使用的RTC芯片为DS1307,可以提供秒、分、小时等信息[9]。RTC模块电路如图7所示。
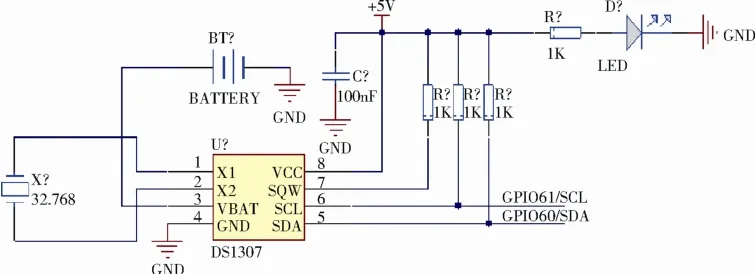
图7 RTC模块电路图Fig. 7 The RTC circuit diagram
1.6串口模块
质子磁力仪和PC上位机的通信方式有很多,如USB、串口、网口等。本设计的质子磁力仪将串口作为通信接口。串口模块电路如图8所示。
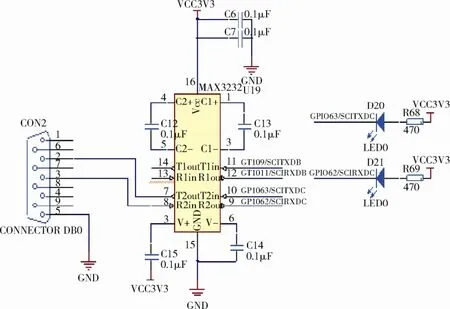
图8 串口电路图Fig. 8 Serial interface circuit diagram
2 系统程序设计
系统程序设计总体上分为2部分:1)下位机程序设计,即控制板的程序设计;2)上位机程序设计,即PC软件程序设计。
从图9控制板程序流程可看出,系统上电经过必要的初始化工作后就进入人机交互界面,这里用户根据液晶屏提示的信息通过按键选择进入相应的工作模式。主要有以下4种工作模式:
1)磁场测量,测量磁场并读取RTC的时间信息显示;
2)磁场测量(含实时存储),除了1)中的功能以外每次测量后将数据保存在U盘或其他USB设备中;
3)噪声测试,专用于野外测试时测量外界干扰信号;
4)数据传输,通过串口向上位机发送数据或接收上位机的控制命令。

图9 控制板程序流程Fig. 9 The flow chart of the program of the control board
上位机数据采集与控制软件采用QT开发平台,主要提供以下功能:
1)磁场数据以及测试时间的实时显示;
2)数据文件(txt格式)的存储与打开;
3)根据磁场数据动态绘制曲线。
软件的操作界面如图10所示。
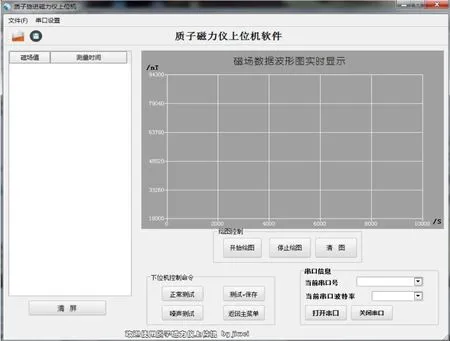
图10 PC软件操作界面Fig. 10 PC software interface
3 关键技术的测试与结果分析
数字控制板的核心功能就是对旋进信号经过滤波、放大、整形之后的方波信号的频率进行测量。因为旋进信号频率的测量精度将直接影响最后磁感应强度的测量精度[10],所以在实验室内专门进行了测频技术的测试(见图11)。首先在探头周围缠绕上线圈(非极化线圈);再将其放入白色屏蔽筒(屏蔽外界所有磁场信号)当中;将线圈引出屏蔽筒接在波形发生器上,通过波形发生器产生幅度为60mV的不同频率的正弦波来模拟不同地点的旋进信号。

图11 在实验室测量旋进信号频率量Fig. 11 Precession signal measurement in laboratory
测试时,用波形发生器分别产生2000、3000 和4000Hz的正弦信号来模拟3个不同地点的旋进信号。质子旋进式磁力仪的磁场数据输出频率为0.5Hz,即每2s输出1个数据。每次实验时间约为30min。
根据公式B=2πf/γp(其中γp为旋磁比,是一个不变的常量,对于质子,2π/γp约为23.4874),将测得的质子系统旋进频率f转换为磁感应强度B,结果如图12~图14所示。2000、3000和4000Hz的旋进频率对应的磁感应强度理论值分别为46974.8、70462.2和93949.6nT。从图可看出,3次测量的结果与理论值相差仅约1nT,转换成频率值则与波形发生器的标准输出值相差约为0.04Hz。这说明,该系统在测量精度上达到了国内先进水平。
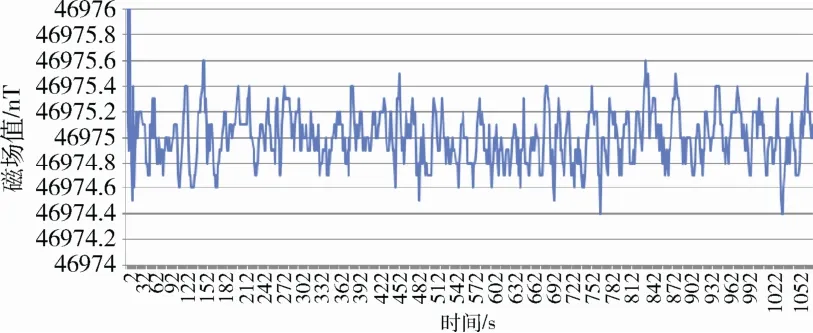
图12 磁场测试值(2000Hz)Fig. 12 Test data of the geomagnetic field(2000Hz)

图13 磁场测试值(3000Hz)Fig. 13 Test data of the geomagnetic field(3000Hz)

图14 磁场测试值(4000Hz)Fig. 14 Test data of the geomagnetic field(4000Hz)
4 结束语
本文设计了一种新型质子旋进式磁力仪控制系统,采用DSP28335作为主控芯片,完成了其框架的设计和原理样机的研制。其测频电路和方法在保证了测量精度的同时简化了硬件电路,降低了成本。新型质子旋进式磁力仪还可以与上位机软件进行通信,从而实现数据的实时采集、动态曲线显示以及保存。最后在实验室内对关键测频技术进行了测试,效果良好。
质子旋进式磁力仪作为测量未知磁场的重要仪器之一,要想在精度、灵敏度、测量速度、工作温度等指标上都达到最优绝非一件易事,仍需要深入的探索和研究。
参考文献(References)
[1] 王应吉. 基于MSP430的质子旋进式磁力仪设计[D].吉林: 吉林大学智能仪器与测控技术研究所, 2006: 1-4
[2] 严兴, 柴剑勇, 黄晖, 等. 新型质子旋进磁力仪软件系统设计与实现[D]. 广东: 广东省地震局, 2009: 2-6
[3] 黄晖, 柴剑勇, 严兴, 等. PIC16F877A在新型质子旋进磁力仪中的应用[D]. 广东: 广东省地震局, 2010: 2-5
[4] 唐雄华. 质子旋进式分量磁力仪设计原理[J]. 吉林大学学报: 地球科学版, 1981(2): 1-5
[5] 张昌达. 量子磁力仪研究和开发近况[J]. 物探与化探, 2005, 29(4): 283-287 Zhang Changda. Recent advances in the research and development of quantum magnetometers[J]. Geophysical and Geochemical Exploration, 2005, 29(4): 283-287
[6] Johnston M J S, Mueller R J, Ware R H, et al. Precision of geomagnetic field measurements in a tectonically active region[J]. J Geomag Geoelectr, 1984, 36: 83-95
[7] Lenz J, Edelstein A S. Magnetic sensors and their applications[J]. Sensors Journal, 2006, 6(3): 631-649
[8] 顾卫纲. 手把手教你学DSP-基于TMS320X281X[M].北京: 北京航空航天大学出版社, 2011: 2-15
[9] 何志伟. 基于MSP430质子旋进磁力仪设计[D]. 长春:吉林大学, 2007: 3-5
[10] 丁玉美, 高西全. 数字信号处理[M]. 2版. 西安: 西安电子科技大学出版社, 2006: 121-225
(编辑:许京媛)
Design and implementation of proton precession magnetometer based on DSP28335
Ji Wei1, Zhao Heming1, Qiao Donghai2, Du Aimin3
(1. Electronics and Information Engineering, Soochow University, Suzhou 215006, China; 2. Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China; 3. Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China)
Abstract:The proton precession magnetometer is an instrument based on the proton precession frequency to measure the intensity of the geomagnetic field. According to the current development of the proton magnetometer at home and abroad, a new proton precession magnetometer control system based on the DSP28335 is designed, and the control circuit board and the key technology of the frequency measurement are discussed in detail. Unlike the traditional magnetometers based on the single chip microcomputer or PIC, the new design can solve the problems like the high cost, the limited functionality and the complex hardware circuit. A principle prototype is completed and the frequency measurement technique is tested in the laboratory. The results show that the measurement precision is up to an advanced level in our country.
Key words:proton precession magnetometer; DSP28335; frequency measurement; PC software
作者简介:季 伟(1990—),男,硕士研究生,专业研究方向为嵌入式、仪表仪器。E-mail: 739780648@qq.com。
基金项目:国家重大专项: 深部资源探测,01子项目,卫星磁测载荷(编号:ZDYZ2012-1-01 81381090)
收稿日期:2015-07-22;修回日期:2016-03-10
DOI:10.3969/j.issn.1673-1379.2016.02.008
中图分类号:P318.6+3
文献标志码:A
文章编号:1673-1379(2016)02-0158-05