绳牵引并联机器人的关节柔顺控制研究
2016-05-18龚定伟梁艳阳刘宏伟
龚定伟++梁艳阳++刘宏伟


摘要:绳牵引并联机器人作为一种新型并联机构,其理论研究已经日趋成熟,然而其实际运用还相对较少。为研究其关节柔顺控制,设计并搭建了三平移自由度的绳牵引并联机器人的实体模型。利用牛顿欧拉法建立其动力学模型,借助力反馈和PID控制算法对关节进行柔顺控制,通过多次力控实验,来分析PID算法对机器人关节的柔顺控制效果。
关键词:绳牵引;并联机器人;柔顺控制;力反馈
中图分类号:TP242 文献标识码:A 文章编号:1009-3044(2016)09-0246-04
Research on the Joint Compliance Control of Cable-Driven Parallel Robot
GONG Ding-wei, LIANG Yan-yang, LIU Hong-wei
(Robot Technology Used for Special Environment Key Laboratory of Sichuan Province, Southwest University of Science and Technology, Mianyang 621010, China)
Abstract: Cable-driven parallel robot is a new type of parallel mechanism. Its theoretical research has been mature day by day, but the application is less. In order to study the joint compliance control, the entity model of 3T cable-driven parallel robot is designed and built. Newton Euler method is used to establish its dynamic model. Force feedback and PID control algorithm are applied to the joint of compliant control. By repeated force-controlled experiments , the effect of the joint compliant control by PID algorithm is analyzed.
Key words: cable-driven; parallel robots; compliance control; force feedback
机器人技术的问世无疑又是人类工业历史的一次革命,该技术的发展给社会带来了巨变。在串联机器人蓬勃发展的时候,出现了一类全新的机器人——并联机器人。并联机器人作为串联式机器人强有力的补充,引起机器人学理论界和工程界的广泛关注,成为机器人研究的热点之一。经过数十年的探索,并联机器人的研究已从基础理论工作逐渐地过渡到实践应用中。相对于串联机器人,并联机器人具有以下优点:刚度大;结构稳定;承载能力强;精度高;运动惯性小;在位置求解上,串联机构正解容易,逆解困难,而并联机构正解困难,逆解容易。由于并联机器人的在线实时计算是要求计算逆解,这对串联机构十分困难,而并联机构却容易实现。并联机器人在很大程度上弥补了串联机器人的不足,因而扩大了整个机器人的应用领域[1]。绳牵引并联机器人[2]是继串联机器人和并联机器人之后出现的一种新型机器人机构,它用柔索代替并联机器人中的刚体连杆,具有结构简单、工作空间大、可重构性强、惯性小和运动速度、响应速度快等优点[3,4] 。
随着机器人的多样化,其控制方式也多种多样,人们可以按照需求给机器人编写程序,设定功能。其中机器人的主动柔顺控制[5] 技术是新兴智能制造中的一项关键技术,也是柔性装配自动化中的难点之一。它集传感器、计算机、机械、电子、力学和自动控制等众多学科于一身,其理论研究和技术实现都面临着不少急待解决的难题。它的研究成果不仅具有很强的理论意义,还有利于相关技术的突破和革新。
绳牵引并联机器人具有诸多优点,同时也具有很强的实用性。若能将绳牵引并联机器人与主动柔顺控制技术相结合,那么便能使绳牵引并联机器人更好地服务于社会。因此,本文针对三平移自由度绳牵引并联机器人的关节柔顺控制技术展开研究。
1 绳牵引并联机构模型
对于绳牵引并联机器人而言,不同的用途它的结构设计[6] 就有差异。本文所研究的机器人是具有三个平移自由度的机器人[7] ,因此设计的结构也有所不同。
三自由度绳牵引并联机器人的实体模型是进行各项理论分析,完成各种张力试验的基础。因此必须通过对绳牵引并联机器人结构的充分调研,才能设计出一种合适的三平移自由度的绳牵引并联机器人的三维模型,再通过仿真分析其受力情况,若能满足要求再进行机械加工,组建该绳牵引机器人的实体模型。该绳牵引并联机器人的结构示意图如图1、图2、图3所示。
该机器人结构主要包括基础设施、末端器、柔索驱动单元等。系统共有四个柔索驱动单元,每一个柔索驱动单元都包括电机、导线滑轮、绕线滚筒等。基础设施包括柔索、立柱及滑轮等;系统的末端器可以根据具体应用改变,可以是传感器或灵巧的操作装置等。如图1所示,每根柔索连接一个驱动单元和末端器,通过驱动单元来控制柔索。通过驱动单元对柔索长度和张力的控制实现末端器的移动。图2、图3是驱动单元和立柱的放大示意图。
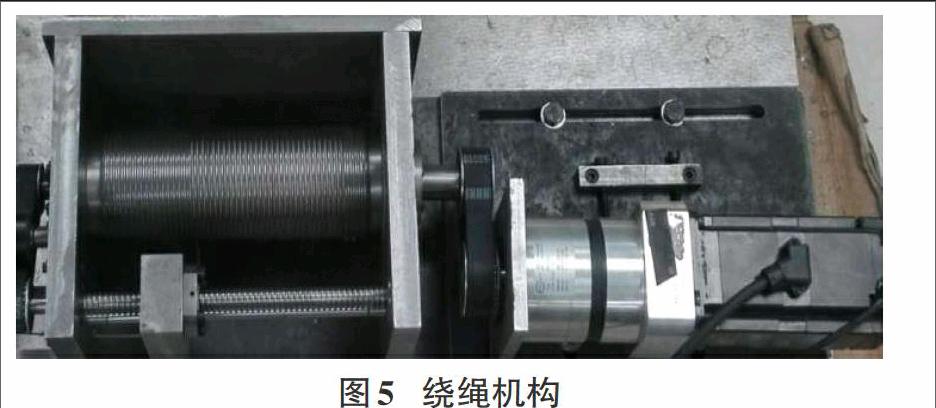
在加工过程中,出现了许多问题如位置螺纹孔打反方向,尺寸偏大等,致使按照图纸加工出来的产品没有那么理想化。在经过一次次的修改调整之后,三自由度绳牵引并联机器人的实体模型已完全搭建如图4。整个机器人的绕绳机构如图5是机器人的关键部分。如图6是机器人力控实现的核心部件。
