基于ADVISOR的纯电动汽车动力系统匹配
2016-05-18杨维健常志超
杨维健,常志超
(长安大学汽车学院,陕西 西安 710054)
基于ADVISOR的纯电动汽车动力系统匹配
杨维健,常志超
(长安大学汽车学院,陕西 西安 710054)
发展纯电动汽车已经成为当今汽车行业的主流,在电动汽车核心技术中动力系统的参数匹配是其中之一,合理的参数匹配对汽车的动力性与续驶里程都有很大的影响。文章首先列出了纯电动汽车整车参数和性能指标,根据汽车受力分析,初步计算各部件的基本参数。然后,利用ADVISOR 仿真软件,仿真了动力性和经济性,为以后其他车型的匹配研究提供依据。
纯电动汽车;动力性;经济性;匹配;仿真
CLC NO.:U469.7 Document Code: A Article ID: 1671-7988 (2016)07-32-03
前言
能源与环境问题成为困扰传统汽车发展的瓶颈,因而发展纯电动汽车已经成为当今汽车行业的主流。然而,纯电动汽车面临一系列的问题没有解决。其中,电池容量和电机性能成为困扰电动汽车走进千家万户的重要因素。在短时间内无法有效提高电池容量、新能源电机技术不成熟的前提下,合理利用现有条件,对纯电动汽车动力系统参数进行合理匹配变得越来越重要。
1、 某型纯电动汽车的整车参数和性能指标
2、动力匹配的计算过程
2.1 汽车受力分析
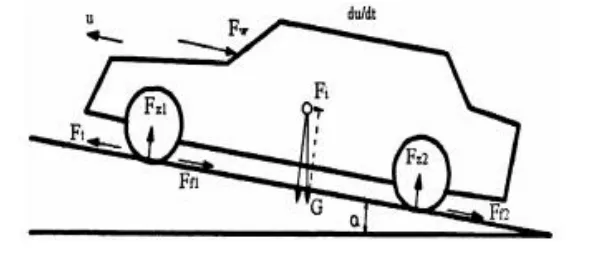
图1 汽车加速上坡时的受力图
虽然纯电动汽车与传统汽车有着很大的区别特别是在驱动方式上,但是它们在行驶过程中的受力情况是一样的。
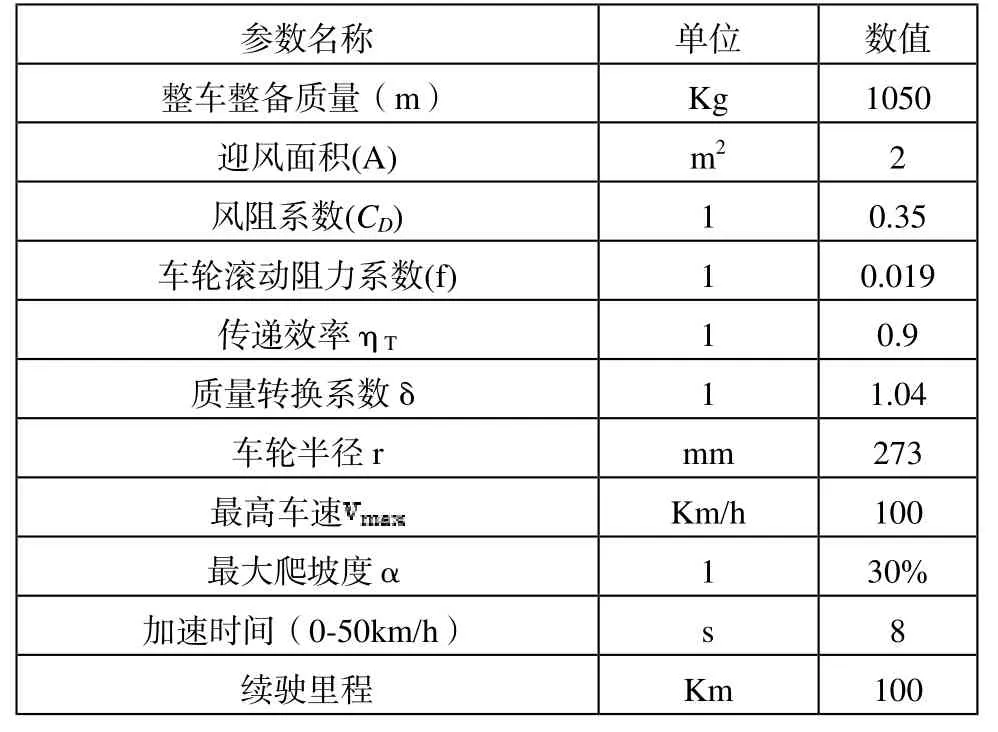
表1 整车参数和性能指标
汽车的行驶方程式是:
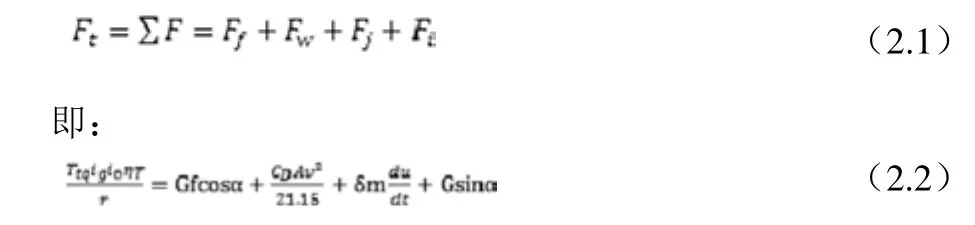
上式中,Ft为驱动力;ΣF为各种阻力之和;r为轮胎半径;ηT表示动力系统的效率;Ttq表示电动机转矩;ig表示变速器的传动比;io主减速器的传动比;Ff为滚动阻力;Fi的为坡度阻力;Fw为空气阻力;Fj为加速阻力。
2.2 动力性能分析
2.2.1 最高车速分析
汽车在水平良好路面上的以最高车速行驶时,只考虑空气阻力和滚动阻力,可得:

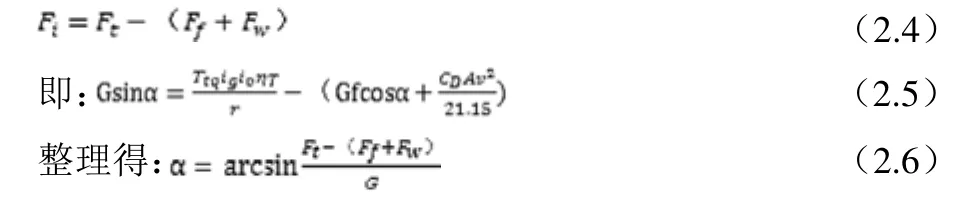
2.2.2 爬坡能力分析
爬坡时车速较低,忽略空气阻力和加速阻力。因此其坡度阻力为:
2.2.3 加速性能分析

2.3 经济性能分析
纯电动汽车以一定速度,在水平路面等速行驶时所消耗的能量和等速行驶工况下的续航里程为:

式中,η表示电机以及控制器的传动效率;W表示电池总能量。
联立式(2.10)和(2.11)可得等速时续航里程公式为:

3、驱动电机参数设计
3.1 驱动电动机功率的选择
①根据最高车速确定电动机功率:
式中,x为拟合系数,一般约为0.5;tm为起步加速过程的时间(s),vm为末车速。
假设整车在平坦路面加速,根据整车加速过程动力学方程,其瞬态过程总功率为:

电动汽车的电动机功率应同时满足最高行驶车速、爬坡度和加速性能的要求,所以电动汽车的电动机峰值功率Pm为:
式中,λ为电动机的过载系数,一般取2~3。
3.2 电动机转速的选择
电动机额定转速ne的计算式为:

在式中,ne表示电动机的额定转速(r/min),nmax表示电动机的最大转速(r/min),通常一般取2~β~4[5]。
3.3 电动机转矩的选择
根据转速转矩和功率之间的关系,可得额定转矩Te:

4、驱动系统传动比的选择
(1)最小传动比的确定:

(2)最大传动比的确定(忽略空气阻力和加速阻力):

最大传动比确定以后,还应计算驱动轮的附着率,检查附着条件是否满足要求:

式中,φ为附着系数,一般可取0.5~0.6。
5、动力电池的参数设计
(1)根据最大功率选择电池组数目:

Pbamx为单个电池的最大输出功率,ηe为电机的效率,ηec为电机控制器的效率。
(2)根据续驶里程选择电池组的数目:

式中L为续驶里程(km),W为汽车行驶1km所消耗的能量(kw),Vs为单个电池的电压(V),Cs为单位电池的容量(Ah)。
由上述两种方法确定的电动汽车电池组数目为:

6、匹配结果

表2 纯电动汽车动力系统匹配结果
7、仿真软件ADVISOR的应用
随着仿真理论发展和计算机技术的应用,利用仿真软件对纯电动汽车的整体性能进行模拟,逐渐成为一种重要的研究方法。仿真技术的应用,很大程度上改善了电动汽车的性能,缩短了研发周期,提高了工作效率。
本文选用CYC_ECE_EUDC作为循环工况。如图2为该循环工况的数据关系曲线:
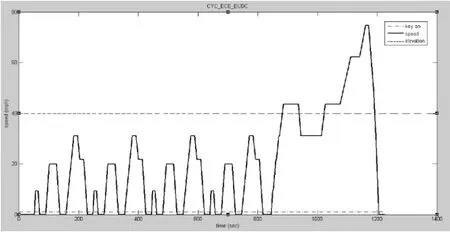
图2 CYC_ECE_EUDC道路循环工况
该循环工况是有两部分构成的。前800s分成四个相同的小部分,每一个小部分包括15种行驶方式,所以又称“十五工况法”, 共进行4个十五工况。测试时间持续780s,总行驶里程为4.052km,平均车速18.7km/h。第二部分为一个附加的市郊行驶工况(EUDC),代表市郊车辆运行过程,测试时间为400s,行驶里程6.955km,平均车速62.6 km/h,该部分最高速度为120km/h。
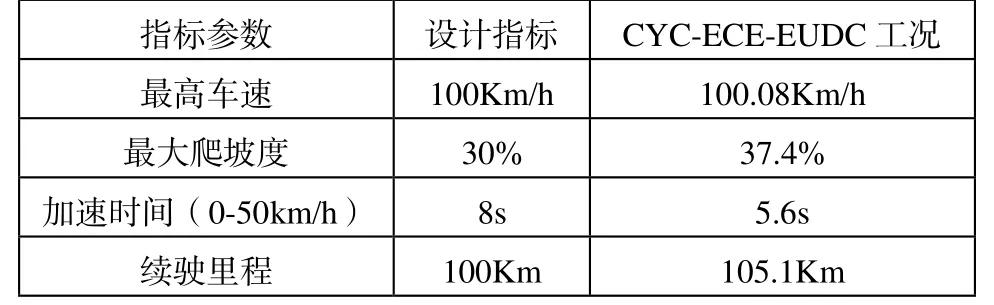
表3 ADVISOR仿真结果与对比
从表3中仿真结果以及设计指标的比较可以看出:汽车的最大行驶速度接近设计指标,说明了减速器速比或者电机功率比较合理;仿真结果所显示的0~50(km/h)的加速性能和爬坡度优于设计的指标,这就体现了驱动机的低速扭矩特性良好;该工况下的续驶里程稍微大于设计指标,说明蓄电池能量正好。
[1] 谢明洁.电动汽车发展现状及前景[J].中国科技信息,2013(22): P120-P122.
[2] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2004.
[3] 余志生.汽车理论(第四版)[M].北京:机械工业出版社,2006.
[4] 徐国凯,张秀春.电动汽车的驱动与控制[M].北京:电子工业出版社,2010.6.
[5] 李晓林.电动汽车整车控制系统介绍[J].科技资讯,2012(19): P27-P29.
[6] 包建超.基于ADVISOR仿真的纯电动汽车动力系统匹配研究[D].西安:长安大学,2014.
Pure electric automobile power transmission parameter match and study based on ADVISOR
Yang Weijian, Chang Zhichao
( School of automobile, Chang’ an university, Shaanxi Xi’an 710054 )
Nowadays, the development of pure electric vehicles has become the mainstream of automotive industry. The optimal matching of dynamic transmission device parameters is one of the key techniques and optimal matching has a great influence on dynamic performance and driving rang. Firstly, the parameters and performance indexes of the pure electric vehicle are listed in this paper. According to the force analysis of the vehicle,the basic parameters of each device are calculated. Then, using the ADVISOR, the dynamic performance and driving rang are simulated.As a model, it provides a basis for the matching of other models in the future.
pure electric vehicles; dynamic; driving rang; matching; simulation
U469.7
A
1671-7988(2016)07-32-03
杨维健,就读于长安大学。
10.16638/j.cnki.1671-7988.2016.07.010
