S型铺管力学计算方法发展现状及技术展望*
2016-05-15韩端锋昝英飞袁利毫吴朝晖黄福祥
韩端锋 昝英飞 袁利毫 吴朝晖 黄福祥
(1. 哈尔滨工程大学船舶工程学院 黑龙江哈尔滨 150001; 2. 海洋石油工程股份有限公司 天津 300451)
S型铺管力学计算方法发展现状及技术展望*
韩端锋1昝英飞1袁利毫1吴朝晖2黄福祥2
(1. 哈尔滨工程大学船舶工程学院 黑龙江哈尔滨 150001; 2. 海洋石油工程股份有限公司 天津 300451)
韩端锋,昝英飞,袁利毫,等.S型铺管力学计算方法发展现状及技术展望[J].中国海上油气,2016,28(6):99-107.
Han Duanfeng,Zan Yingfei,Yuan Lihao,et al.Development status and prospect of S-laying mechanical calculation method[J].China Offshore Oil and Gas,2016,28(6):99-107.
基于S型铺管技术特点,介绍了国内外管道静力学与动力学分析计算方法、管道触地段与海床耦合分析以及管道与张紧器耦合分析发展现状,对比分析了各种计算方法的优点和使用局限性;在此基础上,指出了未来尚待解决的问题和今后技术的研究方向,为保证S型铺管作业安全和提高作业性能奠定了理论基础。
S型铺管;管道静力学;管道动力学;计算方法;耦合分析;发展现状;技术展望
近年来,随着世界能源需求量的持续增加,海洋油气资源勘探开发飞速发展,开采区域从近海浅水逐渐延伸至远海深水,而海底管道是深水油气田开发建设工程的重要组成部分,对海上油气的开发、生产和产品外输起着关键性的作用,被称为海上油气田的“生命线”[1- 2]。在海底管线铺设安装中,有多种不同的技术方法和装备可以采用,S型铺管法是代表方法之一。
1998年建造的“Solitaire号”S型铺管船代表了新一代的铺管技术,该船的载重量达22 000 t,采用动力定位系统,已经完成了大量的海底管道铺设工程,保持着2 775 m的海底管道铺设水深记录,克服了S型铺管在深水中铺设的限制,集成创新了多项世界顶级装备技术[3-8]。为推动中国海洋石油开发从近海走向深海,我国“海洋石油201”号S型铺管船于2012年4月交付使用,并于2013年5月完成了首个工程项目荔湾3-1气田深水段的长78.9 km、管径152.4 mm的海底管道铺设任务,最大铺设作业水深达1 409 m,创造了中国海洋石油工程中的海管铺设水深、铺设速度、首次大角度高落差的L型弯铺设以及首个深水在线三通安装等一系列纪录,极大地提升了国内自主创新能力,填补了中国在深水海洋工程建设特大型装备项目上的空白[9-11]。
随着深海油气的开发以及S型铺管作业的增多,S型铺管的特性更加突出,其特点主要有[12-13]:具有很强的适应性,既可用于浅水铺管,也可用于深水铺管;在水平方向采用单或双接头进行焊接,铺管效率较高,节约时间和铺管成本,典型铺设速度可以达到3.5 km/d;相比较其他方法,对海况的适应能力及持续作业能力较强;管道在铺设过程中张力极大,必须寻找合适的方法处理极大的张力;作业水深越深,托管架越长,越难以保证船舶的稳定性;作业水深越深,铺管所需张力越大,作业风险越高。
国内有许多研究团队对S型铺管计算问题进行了相关研究。李志刚 等[13]系统地总结了包括S型铺管技术在内的深水铺管技术,对国内使用的主要铺管技术和铺管船进行了综述;孙丽萍 等[14-15]对管道-托管架-船体间进行了全耦合的计算分析;岳前进 等[16]基于国家“863”计划与“973”计划课题对超深水S型海底管道铺设中上弯段关键力学问题进行了研究;王立忠 等[17]对管道与海床间的相互作用进行了研究。
国外开发了很多S型管道的计算软件。Malahy[18]基于有限元法开发了Offpipe管道计算软件,具有较高的计算精度和稳定性,得到了全球众多海洋工程公司的认可;Orcina公司开发了Orcaflex[19]海洋动力学软件,可以计算管道的动力学和静力学问题,并且可以处理全三维、非线性问题以及进行时域分析;Jensen[20]基于Reflex软件利用有限元法对管道进行了分析;ABAQUS软件也可对S型管道进行计算分析[21];DNV船级社[22]基于船级社规范开发了相应的S型/J型管道计算软件。然而,在国内尚未有成型的商业管道计算软件。
S型管道在铺设中的变形实际上是大挠度、非线性的弹性形变,属于几何非线性的范畴,其求解中常用的方法主要有悬链线法、有限差分法、非线性有限元法等,这些方法在求解精度、求解时间及实用范围上存在各自的局限性。特别是在实际计算中,由于管道的着地点的水平力及海床的支反力未知,管道的悬跨段长度及水平投影长度未知,故而增加了管道求解的难度,因此多年来人们大都在关注管道的数学模型的计算方法。
1 S型管道受力分析
如图1所示,根据受力特点的不同,整条S型管道可以划分为4个部分:第1部分是从铺管船上的张紧器开始向下延伸到管道脱离托管架支撑为止,称为上弯段,包含水面以上的部分和水面以下的部分,上弯段管道同时受张紧器拉力、弯矩以及托管架托辊支撑力,由此管道材料进入非线性阶段。第2部分为托管架段和下弯段之间的部分称为中间段,此段既受到托管架段的弯矩影响,也受到下弯段弯矩影响,因此该段计算中应当将弯矩的影响考虑在内。第3部分是从反弯点到管道触地点的部分,称为下弯段,具有很长的悬跨段,也是计算中比较关注的部分,特别是接近于海底段管道受到较大的轴力、弯矩和静水压力的组合作用[5]。第4部分为管道与海平面接触的部分,称为触地段,有时学者将海平面假设为钢性的,以简化求解。然而,触地段管道受静水压力、海底与管道的相互作用力以及可能出现的冲击等,导致此部分也是铺设分析的难点。

图1 S型铺设中的管道形态
2 管道静力学与动力学分析发展现状
在管道静力学分析中,根据管道受到的重力、浮力、托管架支撑力、张紧器拉力与海底支撑力建立静力平衡方程,解算管道的形态,并分析管道受力、弯矩与应力,从而校核管道受力是否在载荷允许范围内。在管道动力学分析中,除了需要考虑管道受到的静力作用,还需要考虑作用于管道上的海流、波浪、船舶运动等动态力作用,根据动力学方程求解管道动态运动,并计算管道的受力、弯矩与应力,从而校核管道由于受到动态外动力作用后的设计状态。
2.1 自然悬链线法
自然悬链线法中使用的是静力平衡方程,忽略了管道的刚度,管道的形态与应力可以迅速地通过解析解被解出,这种简化产生的误差对于深水区的管道铺设可以忽略不计,但在浅水区管道刚度对铺管形态影响较大,忽略刚度会产生一定的误差,而且水深越浅误差越大。Brown[23]设计了模型试验,从而直观反映了深水铺管的特点,并根据试验结果进一步简化了悬链线理论公式;Dixon[24]在假设海床为刚性且水平的情况下,推导了自然悬链线法的解析解。
2.2 刚悬链线法
刚悬链线法是在自然悬链线法的基础上考虑了管道的弯曲刚度的影响,使得此种方法既可以适用于深水又可适用于浅水,但方程不具有解析解,仅能求出反弯点以下水深,水平距离间的关系需要进一步通过数值方法进行迭代求解,由此求解耗费的时间要长于自然悬链线法。Plunkett等[25]推导出了用渐进扩展式近似求解刚悬链线的方法;龚顺风 等[26-27]基于Plunkett推导的结果,利用刚悬链线法对S型管道形态进行了计算,并对托管架半径、初始角度、张紧器张力、作业水深等参数对管道的影响程度进行了详细的分析;党学博 等[28]对S型管道的上弯段进行了专门计算分析,分别对连续型和滚轮支撑型2种托管架进行了讨论,结果表明有滚轮的位置应力较大,滚轮支撑之间应力较小;周俊[29]分别利用自然悬链线法和刚悬链线法对S型管道应力与形态进行了计算,并进行了敏感性分析,结果表明在浅水时自然悬链线法计算结果偏于保守,在深水时两者计算的结果相差不大。
2.3 奇异摄动法
摄动方法是求解非线性问题近似解析解的有效方法。对于S型铺管问题,有2个边界层,一个是托管架的分离点附近,另一个是在管线距离海底附近。正则摄动法在这2个边界处失效,而奇异摄动法即小参数法可解决这一问题[30]。Konuk[31- 32]基于弹性杆理论推导出了三维S型管道的静力平衡方程式,并利用摄动法编写程序计算分析了管道二维非线性受力问题;Guarracino[33]利用奇异摄动法对S型管道进行了静力分析,并将所得出的结果与ABAQUS有限元法进行了对比分析,结果表明两者计算结果基本吻合;黄玉盈 等[34]提出了利用奇异摄动法将悬跨段管道各点的倾斜角分解为外部解、内部解和修正项,然后利用边界条件来确定管道的形态,由于计算中忽略了高阶项,从而得出计算角度的解析式,此方法具有计算速度快的特点;Zhu[35]研究表明,在忽略了高阶项的情况下,奇异摄动法具有很好的计算速度,并对于刚度较小的管道计算准确度也有保证。
2.4 有限差分法
有限差分法在求解微分方程组时可以方便地处理海流载荷及海底支撑力等非线性因素及动力因素的影响,但计算效率较低。Palmer[36]提出了将有限差分法用于S型铺管计算中;Yan[37]基于有限差分法对管道在铺管过程中进行了三维静力学分析;Callegari 等[38]基于有限差分法对管道进行了静力学与动力学分析,并且详细分析了海流对管道的影响以及不同仿真步长引起的管道计算结果的改变;顾永宁[39-40]分别利用刚悬链线法、有限差分法对S型管道计算进行了对比分析;陈凯 等[41]建立了S型管道形态的大绕度梁微分方程,通过有限差分法对模型进行了求解,并与悬链线理论解进行了对比,从而论证了深水S型铺管时悬垂段初始构形可以采用悬链线构形进行近似;Datta[42]利用有限差分法对S型铺管回收A/R作业中的管道进行了分析。
2.5 非线性有限元法
非线性有限元法的计算方法与有限差分法很相似,只是它的迭代关系是由能量原理或加权残值法(如最小二乘法等)确定的。此种方法计算效率较低,但由于能够处理复杂的边界条件和海洋环境载荷,并能够适用于管线的动力学分析,因此适用范围广泛。陈凯 等[41]在对深水S型铺管进行的整体变形和受力有限元分析计算中,对触地段考虑了管土间相互作用,对过弯段则通过约束条件的处理,模拟了管道在托管架上的真实状态,并与其他方式边界条件下的有限元法计算结果进行了比较及验证;Vlahopoulos[43-44]和 Schmidt[45]基于非线性增量有限元法分析了不同张紧器张力对管道形状和应力的影响;Malahy 等[46-48]基于有限元法计算了管道的三维模型;Kirk[49]利用有限元法分析了波浪对管道的动力响应;Ciaccia[50]利用三维有限元法对管道进行了分析,并对比了海流等外环境对管道的形态与应力的影响;Hall[51]基于非线性有限元法在时域中对管道进行了动力学分析,着重讨论了非线性的海流与海底对管道的作用力;Clauss[52]讨论了船舶运动、水深和管道参数、外界环境对管道应力的动态影响,结果表明以上参数对管道铺设过程的可靠性有很大影响。
2.6 机械人手臂法
机器人手臂的计算方法优点在于不仅具有较好的准确性,而且可以满足控制系统实时仿真计算。Jensen[53-56]将机器人手臂的计算方法用于管道的计算,在考虑管道附加质量、科里奥利项、阻尼系数以及海流力的情况下对S型铺管和J型铺管建立了数学模型,此种方法对管道边界条件(如船舶运动、海底耦合作用)以及海洋环境因素的影响都可以很容易的考虑。在计算效率上,机器人手臂法的计算效率与划分节点数目有一定关联,Jensen[56]研究表明在900 m深水中,除了在触地点附近与悬链线法结果有些不同外,其他部分两者结果基本相同,因此管道的划分数目不需要很多,已经可以满足计算的精度;杨丽丽 等[57]基于机械人手臂法将管线与铺管船相结合,建立了船舶在垂直平面内运动时的管线运动学与动力学方程,进而利用鲁棒自适应控制方法建立了保证管线形态的有效控制模型。
表1为在计算S型管道时所用方法的适用范围、对管道的要求及计算效率的对比情况。
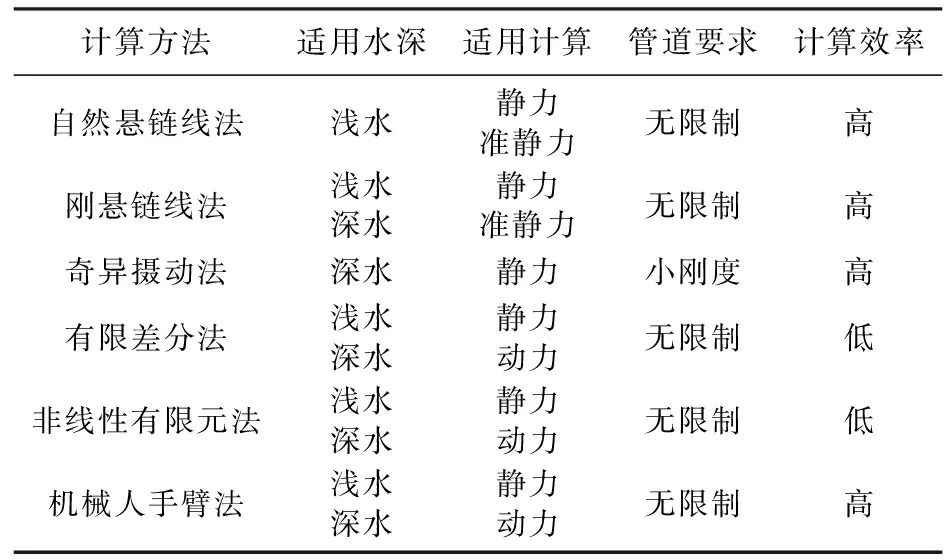
表1 S型铺管计算方法对比
3 管道触地段与海底耦合分析发展现状
管道触地段与海底耦合分析时,根据迭代法等计算管道嵌入土壤的位移,分析触底段的整体形态,进而分析管道的受力与弯矩,校核管道在触底点处于触地段的受力状态。在海底海流力可以基本忽略不计,但由于海底的土壤类型不同以及地形起伏都会影响管道在触地点的受力[58-61]。对于管线与海底耦合的相互作用,主要可以分为2种研究方法:一种是将管线与海底的相互作用简化为平面应变问题,分析不同管线埋深下的土体抗力情况;另一种是将管线整体进行考虑,分析管线整体受力情况对管土相互作用的影响[62]。
对于将管线与海底的相互作用简化为平面应变问题,Small[63]将管线假设为一个条形基础,其宽度为管线嵌入部分的弦长;Murff[64]基于塑性理论得到了埋深小于管线半径的土体抗力的上下限;Aubeny[65]采用有限元法在考虑土体强度随着深度变化的情况下分别对光滑与粗糙表面的管线所受到的土体抗力进行了计算;Merifield[66]提出了考虑管线挤压海床时的侧倾向压力管土模型,从而计算了由于侧向压力而导致的弯曲,但此模型仅限于应用在管线埋深小于管线半径的情况。
对于将管线整体进行考虑,Lenci[67]应用4种数学模型对J型管线进行了计算,分别对刚性海底与弹性海底的计算结果进行了对比分析,其中的2个模型将海底假设为Winkler土壤,将弹性海底简化为线性弹簧,其弹性刚度为常数,并且对比分析表明弹性海底的计算结果在形态与拉力分布上与刚性海底有很大不同;Quéau[68]在Lenci建立的模型研究基础上对钢悬链线立管进行了计算分析,讨论了立管脱离点处的位移变化对管线静态应力的影响,并对不同工况下触地区域部分的应力进行了敏感性分析;You[69]基于模型试验将海底假设为非线性弹簧,从而计算了管线与海底的非线性相互作用;Palamer[70]将模型拓展到考虑土体强度随着深度变化的刚性海床模型;Yuan[71-72]在Aubeny、Palamer等研究的基础上,根据J型管线在铺设过程中的受力不同,将管线在海底部分划分为触地段和回弹段,分别讨论了塑性海床与弹塑性海床管线的形态与受力,并得到了塑性海床情况下管线形态的解析解。
4 管道与张紧器耦合分析发展现状
在深水中,如果管道端部的预张力过低,则在触地点区域会产生很大的曲率;如果管道端预张力过高,则在管道顶部会产生高应力,因此在铺管作业时张紧器的张力控制是一个非常关键的因素[73-75]。Mattiazzo等[76-77]研究了由于船舶运动对管道应力的影响以及由此导致张紧器动态张力的变化,但研究中管道应力计算模型比较简单,精度有限;Da Silva[78]对张紧器的动态张力进行了建模计算,并分析了外界波浪力对张紧器张力的影响;江峰 等[79-83]对张紧器的控制系统进行了建模与仿真研究,但对于管道与张紧器动态控制张力的研究甚少,然而,研究表明张紧器的张力大小对铺管作业成本有着重要的影响(图2)[84]。

图2 张紧器张力对铺管作业成本的影响[84]
5 技术展望
1) 加强船舶运动速度及管道下放速度对管道的影响分析。深水铺管技术研究的目的之一是提高铺管速度,缩短海上施工周期。在管道铺设过程中,铺管船向前运动,管道下放,如此产生船舶加速—恒速—减速的周期性运动,如图3所示[85]。然而,目前关于在变速运动过程中船舶与管道间相互耦合的影响研究较少,在计算过程中需要对管道与船舶的位移及受力边界条件进行进一步的处理及分析。
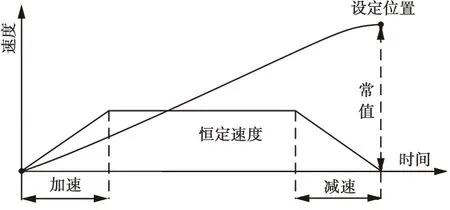
图3 铺管船周期性运动示意图
2) 开展船舶回转对管道着地点的影响分析。在铺管作业过程中,受到海底地形等因素的影响,船舶会进行大回转运动(图4),在回转过程中管道成三维形态,并受到海流及船舶弯矩作用,如何使管道按照预定轨迹准确铺设是计算的难点,其中将涉及到船舶DP系统沿轨迹运行与管道预定着地点匹配计算的准确性的问题。
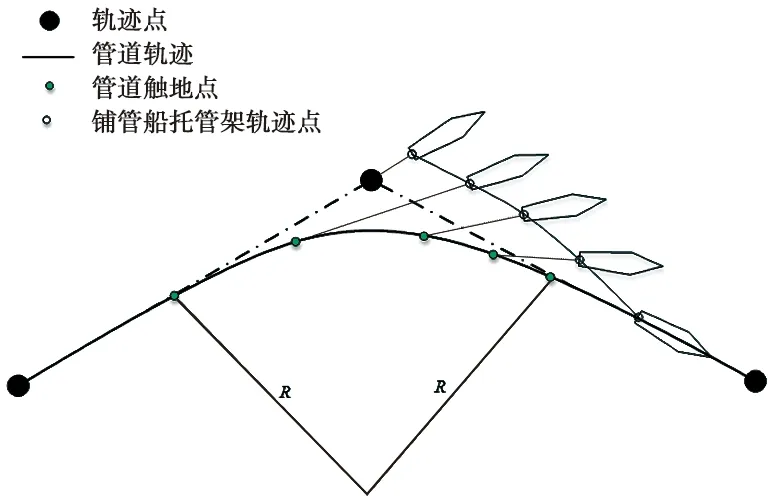
图4 管道铺设轨迹及船舶运动轨迹
3) 加强铺管极限工况分析。应更多地着眼于铺管危险极限工况(如管道屈曲、管道进水等)的分析,以减小后期作业风险,并能够在出现危险作业时提供积极应对措施,因此除了利用数值方法计算以避免危险发生,更需要进一步将人为因素考虑在模型中,基于人机环的原理对铺管极限工况进行进一步研究。
4) 开展铺管过程中耦合运动分析。宋林峰 等[14]对托管架—船体—管线之间的耦合进行了分析,结果表明低频波浪对铺管作业有较大影响,耦合作用力不容忽视。然而,除了低频波浪作用力,内波等环境载荷作用对管道动力的影响以及管道与铺管船,张紧器间的动力耦合问题也是今后研究的方向,这将对铺管的经济效应有很大的影响。
5) 加强特种类型管道铺设计算研究。对于子母管铺设等特种类型管道铺设,国内仅有“海洋石油201”号船于2014年进行了首个双金属机械复合子母管的铺设工作,对管道在水下的水动力性能以及子管与母管间的相互影响的研究都缺乏经验,因此今后需要对特种类型管道的材料属性以及水动力特性进行进一步研究,除了进行数值模拟外,更应开展模型试验加以验证。
6) 开展铺管计算验证技术研究。实船试验是最真实可靠的试验方法,但其实施耗资巨大,具有很大的危险性和破坏性、海上环境数据的不确定性以及实船数据采集的困难,造成了实际上很难达到预期的实船试验的目标,因此目前对实船试验以及在铺管过程中整个过程实时监测研究比较少,通常是仅使用屈曲探测器对管道进行屈曲判断,并不能详细地采集数据用于计算验证。相比之下,模型试验方法具有安全性好等优点,但模型试验受水池深度等限制,Brown[23]对管道进行了二维与三维的缩尺比试验;李金玉[86]利用离散性管道代替了连续性管道进行了试验;Wang等[87]着重对刚悬链线立管与柔软海底的相互作用进行了循环试验;梁凌云 等[88-91]更多地进行了陆上模型试验,对铺管作业整体的水下模型试验研究较少。因此,如何准确地进行深水模型试验和实船试验,进而验证计算的准确性,是我们今后努力的目标。
7) 加强提高计算效率的方法研究。有限差分法和非线性有限元法在计算中具有很好的精度,但计算的效率较低。因此,需要在保证精度的情况下使计算效率有效提高,这也是我们今后研究的目标,可以尝试采用GPU计算及并行计算等方法来提高计算效率。
[1] 党学博,龚顺风,金伟良,等.深水海底管道极限承载能力分析[J].浙江大学学报(工学版),2010,44(4):778-782. Dang Xuebo,Gong Shunfeng,Jin Weiliang,et al.Analysis on ultimate bearing capacity of deepwater submarine pipe[J].Journal of Zhejiang University (Engineering Science),2010,44(4):778-782.
[2] CHEN Wei.Status and challenges of Chinese deepwater oil and gas development[J].Petroleum Science,2011,8(4):477-484.
[3] JO C H.Limitation and comparison of S-Lay and J-Lay methods[R].USA :The International Society of Offshore and Polar Engineers,1993.
[4] STEENHUIS A L J,VAN NORDEN T,REGELINK J,et al.Modifications to the pipelay vessel Solitaire for the independence trail project[R].USA:OTC,2007.
[5] KYRIAKDES S,CORON E.Buckling and collapse[M].Oxford:Elsevier Science,2007. [6] ALLSEAS.Solitaire modifications 2005[R].Allseas,2005.
[7] HEEREMA E P.Recent achievements and present trends in deepwater pipe-lay systems[R].USA:OTC,2005.
[8] LTD A P.Pipelay vessels and techniques[J].PetroZMin Pipeliner,2012,8(1):50-57.
[9] FANG H,DUAN M.Offshore operation facilities[M].Boston:Gulf Professional Publishing,2014.
[10] 许文兵.深水铺管起重船“海洋石油201”研制[J].中国造船,2014,55(1):208-215. Xu Wenbing.Development of deepwater pipelay crane vessel “HAI YANG SHI YOU 201”[J].Ship Building of China,2014,55(1):208-215.
[11] 王晓波,许文兵,肖龙.深水铺管起重船“海洋石油201”在荔湾3-1气田开发工程的适用性分析[C]∥纪念顾懋祥院士海洋工程学术研讨会论文集,2011.
[12] 王自发,朱克强,徐为兵,等.海洋管道S型铺设过程研究[J].海洋工程,2014,32(3):78-88. Wang Zifa,Zhu Keqiang,Xu Weibing,et al.Study on subsea pipeline during S-lay[J].The Ocean Engineering,2014,32(3):78-88.
[13] LI Z,WANG C,HE N,et al.An overview of deepwater pipeline laying technology[J].China Ocean Engineering,2008,22(3):521-532.
[14] 宋林峰,孙丽萍,王德军.深水S型铺管托管架-船体-管线耦合分析[J].哈尔滨工程大学学报,2013,34(4):415-420,433. Song Linfeng,Sun Liping,Wang Dejun.Coupling analysis of stinger-lay barge-pipeline of S-lay installation in deep water[J].Journal of Harbin Engineering University,2013,34(4):415-420,433.
[15] 孙丽萍,朱建勋,艾尚茂,等.全耦合S型铺管动力定位时域分析[J].海洋工程,2015,33(4):1-10. Sun Liping,Zhu Jianxun,Ai Shangmao,et al.Coupling time-domain analysis of dynamic positioning during S-lay operations[J].The Ocean Engineering,2015,33(4):1-10.
[16] 谢鹏,岳前进,岳秀峰,等.超深水S型铺管的局部变形分析[J].哈尔滨工程大学学报,2015,36(1):88-90,97. Xie Peng,Yue Qianjin,Yue Xiufeng,et al.Local deformation analysis of ultra-deepwater S-lay operation[J].Journal of Harbin Engineering University,2015,36(1):88-90,97.
[17] WANG L Z,YUAN F,GUO Z,et al.Analytical prediction of pipeline behaviors in J-Lay on plastic seabed[J].Journal of Waterway,Port,Coastal and Ocean Engineering,2011,138(2):77-85.
[18] MALAHY R C.Offpipe assistant user manual[M].Offpipe,2013. [19] Orcina Ltd.Orcaflex manual version 9.8a[M].Orcina Ltd.,2014.
[20] JENSEN G A,SFSTR M N,NGUYEN T D,et al.A nonlinear PDE formulation for offshore vessel pipeline installation[J].Ocean Engineering,2010,37(4):365-377.
[21] MARCHIONNI L,ALESSANDRO L,VITALI L.Offshore pipeline installation:3-Dimensional finite element modelling[C]∥Proceedings of the ASME 2011 30th International Conference on Ocean,Offshore and Arctic Engineering,2011.
[22] STANDARD D O.Submarine pipeline systems[M].Norway:Det Norske Veritas,2013. [23] BROWNN R J,PALMER A.Developing innovative deep water pipeline construction techniques with physical models[J].Journal of Offshore Mechanics and Arctic Engineering,2007,129(1):56-60.
[24] DIXON D A,RUTLEDG D R.Stiffened catenary calculations in pipeline laying problem[J].Journal of Manufacturing Science and Engineering,1968,90(1):153-160. [25] PLUNKETT R.Static bending stresses in catenaries and drill strings[J].Journal of Manufacturing Science and Engineering,1967,89(1):31-36.
[26] 龚顺风,何勇,周俊,等.深水海底管道S型铺设参数敏感性分析[J].海洋工程,2009,27(4):87-95. Gong Shunfeng,He Yong,Zhou Jun,et al.Parameter sensitivity analysis of S-lay technique for deepwater submarine pipeline[J].The Ocean Engineering,2009,27(4):87-95.
[27] LI Z G,CHEN Y,GONG S F,et al.Configuration of submarine pipeline for deepwater S-lay technique[C]∥Proceedings of the 20th International Offshore and Polar Engineering Conference,2010:20-25.
[28] 党学博,龚顺风,金伟良,等.S型铺管中上弯段管道受力研究[J].船舶力学,2012,16(8):935-942. Dang Xuebo,Gong Shunfeng,Jin Weiliang,et al.Mechanical study on overbend segment of submarine pipeline during S-Lay[J].Journal of Ship Mechanics,2012,16(8):935-942.
[29] 周俊.深水海底管道S型铺管形态及施工工艺研究[D].杭州:浙江大学,2008.
[30] 高红梅.铺管船动力定位系统控制算法研究[D].镇江:江苏科技大学,2013.
[31] KONUK L.Higher order approximations in stress analysis of submarine pipelines[J].Journal of Energy Resources Technology,1980,102(4):190-196.
[32] KONUK L.Application of an adaptive numerical technique to 3-D pipeline problems with strong nonlinearities[J].Journal of Energy Resources Technology,1982,104(1):58-62.
[33] GUARRACINO F,MALLARDO V.A refined analytical analysis of submerged pipelines in seabed laying[J].Applied Ocean Research,1999,21(6):281-293.
[34] 黄玉盈,朱达善.海洋管线铺设时的静力分析[J].海洋工程,1986,4(1):32-46. Huang Yuying,Zhu Dashan.Static analysis of subnarine pipelines during installation[J].The Ocean Engineering,1986,4(1):32-46.
[35] ZHU D S,CHEUNG Y K.Optimization of buoyancy of an articulated stinger on submerged pipelines laid with a barge[J].Ocean Engineering,1997,24(4):301-311.
[36] PALMER A C,HUTCHINSON G,ELLS J W.Configuration of submarine pipelines during laying operations[J].Journal of Manufacturing Science and Engineering,1974,96(4):1112-1118.
[37] YAN J,PEDERSEN P T.3-D static analysis of pipelines during laying[C].USA:OTC,1986.
[38] CALLEGARI M,CARINI C,LENCI S,et al.Dynamic models of marine pipelines for installation in deep and ultra-deep waters:analytical and numerical approaches[C]∥Proceedings of the 16th AIMETA Congress of Theoretical and Applied Mechanics,2003.
[39] 顾永宁.海底管线铺管作业状态分析[J].海洋工程,1988,6(2):11-23. Gu Yongning.On the analysis of pipeline during laying operation[J].The Ocean Engineering,1988,6(2):11-23.
[40] GU Y.Analysis of pipeline behaviors during laying operation[J].China Ocean Engineering,1989,3(4):477-486.
[41] 陈凯,段梦兰,张文.深水S型铺管管道形态及力学分析方法研究[J].力学季刊,2011,32(3):353-359. Chen Kai,Duan Menglan,Zhang Wen.On configuration and mechanical analysis method for deepwater S-lay subsea pipeline[J].Chinese Quarterly of Mechanics,2011,32(3):353-359.
[42] DATTA T K.Abandonment and recovery solution of submarine pipelines[J].Applied Ocean Research,1982,4(4):247-252.
[43] VLAHOPOULOS N,BERNITISAS M M.Three-dimensional nonlinear dynamics of pipelaying[J].Applied Ocean Research,1990,12(3):112-125.
[44] BERNITISAS M M,VLAHOPOULOS N.Three-dimensional nonlinear statics of pipelaying using condensation in an incremental finite element algorithm[J].Computers & Structures,1990,35(3):195-214.
[45] SCHMIDT W.Submarine pipeline analysis with an elastic foundation by the finite element method[J].Journal of Manufacturing Science and Engineering,1977,99(2):480-484.
[46] MALAHY R C,JR.A nonlinear finite element method for the analysis of the offshore pipelaying problem(beam element,geomtric)[D].Houston :Rice University,1985.
[47] WITTBRODT E,SZCZOTKA M,MACZYNSKI A,et al.Rigid finite element method in analysis of dynamics of offshore structures[M].Berlin:Springer,2013.
[48] MARTINEZ C E.GONCALVES R L.Laying modeling of submarine pipelines using contact elements into a corotational formulation[J].Journal of Offshore Mechanics and Arctic Engineering,2003,125(2):145-152.
[49] KIRK C L,ETOK E U.Wave induced random oscillations of pipelines during laying[J].Applied Ocean Research,1979,1(1):51-60.
[50] CIACCIA M,MARTINEZ C,GONCALVES R.Nonlinear 3D finite element formulation for the analysis of submarine pipelines during laying operations[C]∥Proceedings of the ASME 2002 International Mechanical Engineering Congress and Exposition,2002.
[51] HALL J E,HEALEY A J.Dynamics of suspended Marine pipelines[J].Journal of Energy Resources Technology,1980,102(2):112-119.
[52] CLAUSS G,WEEDE H,RIEKERT T.Offshore pipe laying operations-interaction of vessel motions and pipeline dynamic stresses[J].Applied Ocean Research,1992,14(3):175-190.
[53] JENSEN G A,FOSSEN T I.Mathematical models for model based control in offshore piplay operations[C]∥Proceedings of the 28th International Conference on Ocean,Offshore and Arctic Engineering,2009.
[54] JENSEN G A,TRANSETH A A,NGUYEN T D.Modelling and control of offshore marine pipeline during pipelay[C]∥Proceedings of the 17th IFAC World Congress,2008.
[55] JENSEN G A.Offshore pipelaying dynamics[D].Trondheim:Norwegian University of Science and Technology,2010.
[56] JENSEN G A,FOSSEN T I.A robotic approach to nonlinear dynamic modeling of offshore pipelaying operations[C]∥Proceedings of the 8th IFAC International Conference on Manoeuvring and Control of Marine Craft,Guarujá (SP),2009.
[57] 杨丽丽.S型铺管船动力定位鲁棒控制方法研究[D].哈尔滨:哈尔滨工程大学,2013.
[58] 李敢.考虑管土作用的钢悬链线立管动力响应及疲劳分析[D].上海:上海交通大学,2013.
[59] 白兴兰,黄维平,高若沉.海床土刚度对钢悬链线立管触地点动力响应的影响分析[J].工程力学,2011,28(S1):211-216. Bai Xinglan,Huang Weiping,Gao Ruochen.Effect of seabed soil stiffness on dynamic response of a steel catenary riser at touchdown point[J].Engineering Mechanics,2011,28(S1):211-216.
[60] 白兴兰,黄维平.海床土刚度对钢悬链线立管触地点动力响应的影响分析[R].济南:第19届全国结构工程学术会议论文集,2010.
[61] 梁勇.钢悬链线立管触地段管土作用研究[D].杭州:浙江大学,2014.
[62] 袁峰.深海管道铺设及在位稳定性分析[D].杭州:浙江大学,2013.
[63] SMALL S W,TAMBURELLO R D,PIASECKYJ P J.Submarine pipeline support by marine sediments[C]∥Proceedings of the Offshore Technology Conference,1971. [64] MURFF J,WAGNER D,RANDOLPH M.Pipe penetration in cohesive soil[J].Geotechnique,1989,39(2):213-229.
[65] AUBENY C,SHI H,MURFF J.Collapse loads for a cylinder embedded in trench in cohesive soil[J].International Journal of Geomechanics,2005,5(4):320-325.
[66] MERIFIELD R,WKITE D,RANDOLPH M.The ultimate undrained resistance of partially embedded pipelines[J].Geotechnique,2008,58(6):461-470.
[67] LENCI S,CALLEGARI M.Simple analytical models for the J-lay problem[J].Acta Mechanica,2005,178(1/2):23-39.
[68] QU AU L M,KIMIAEI M,RANDOLPH M F.Analytical estimation of static stress range in oscillating steel catenary risers at touchdown areas and its application with dynamic amplification factors[J].Ocean Engineering,2014,88:63-80.
[69] YOU J,BISCONTIN G,AUBENY C.Seafloor interaction with steel catenary risers[C].USA ISOPE 2008.
[70] PALMER A.Touchdown indentation of the seabed[J].Applied Ocean Research,2008,30(3):235-238.
[71] YUAN F,RANDOLPH M F,WANG L,et al.Refined analytical models for pipe-lay on elasto-plastic seabed[J].Applied Ocean Research,2014,48:292-300.
[72] YUAN Feng,WANG Lizhong,GUO Zhen,et al.Analytical analysis of pipeline-soil interaction during J-lay on a plastic seabed with bearing resistance proportional to depth[J].Applied Ocean Research,2012,36(3):60-8.
[73] BREWER W V,DIXON D A.Influence of lay barge motions on a deepwater pipeline laid under tension[J].Journal of Manufacturing Science and Engineering,1970,92(3):595-604.
[74] MARTINS C,HARADA C,COSTA A,et al.Parametric analysis of steel catenary risers under extreme loads[C]∥Proceedings of the 9th Int Offshore Polar Eng Conf,1999.
[75] CROLL J.Bending boundary layers in tensioned cables and rods[J].Applied Ocean Research,2000,22(4):241-253.
[76] ALMONDO A,MATTIAZZO G,MAURO S,et al.Numerical model of a tensioner for undersea pipes laying[C]∥Proceedings of the 8th Biennial Conference on Engineering Systems Design and Analysis,2006.
[77] MATTIAZZO G,MAURO S,GUINZIO P S.A tensioner simulator for use in a pipelaying design tool[J].Mechatronics,2009,19(8):1280-1285.
[78] SILVA D M L,LIMA M H A D,JACOB B P.Pipeline-laybarge interaction model for the simulation of S-lay installation procedures[C]∥Proceedings of the 27th International Conference on Offshore Mechanics and Arctic Engineering,Estoril,2008.
[79] 江峰.船用张紧器系统动态建模与仿真研究[D].大连:大连理工大学,2004.
[80] 辛新.铺管船用电动张紧器系统动态建模与仿真研究[D].大连:大连理工大学,2007.
[81] 张俊亮,曾鸣,刘文利,等.基于PID神经网络集成控制的张紧器液压夹紧缸同步控制策略[J].机床与液压,2010,38(7):7-10. Zhang Junliang,Zeng Ming,Liu Wenli,et al.Control strategy of cylinders synchronization motion of tensioner based on PID neural network integrated controller[J].Machine Tool & Hydraulics,2010,38(7):7-10.
[82] 张俊亮,刘文利,陈翠和,等.深水铺管船用张紧器液压夹紧系统建模与仿真[J].系统仿真学报,2010,22(2):521-527. Zhang Junliang,Liu Wenli,Chen Cuihe,et al.Modeling and simulation of hydraulic clamping system of tensioner for deep water pipelaying vessel[J].Journal of System Simulation,2010,22(2):521-527.
[83] 陈翠和,钟朝廷,万箭波,等.深水铺缆船张紧器夹紧缸液压同步控制系统设计与仿真[J].海洋工程,2012,30(4):137-143. Chen Cuihe,Zhong Chaoting,Wan Jianbo,et al.Simulation and design for the hydraulic synchronization control system of clamping cylinders of tensioner on deep water cable-laying vessel[J].The Ocean Engineering,2012,30(4):137-143.
[84] JENSEN G A,BREIVIK M,FOSSEN T I.Offshore pipelay operations from a control perspective[C]∥Proceedings of the 28th International Conference on Ocean,Offshore and Arctic Engineering,2009.
[85] KONGSBERG.K-Pos Pipelaying Application Operator Manual[R].Norway:Kongsberg Maritime AS,2010.
[86] 李金玉.起重铺管船水动力性能研究[D].上海:上海交通大学,2010.
[87] WANG Lizhong,ZHANG Ju,YUAN Feng,et al.Interaction between catenary riser and soft seabed:Large-scale indoor tests[J].Applied Ocean Research,2014,45:10-21.
[88] 梁凌云,商辉,燕晖,等.托管架及管道对铺管船运动影响的试验研究[C]∥左其华,窦希萍.第十五届中国海洋(岸)工程学术讨论会论文集.北京:海洋出版社,2011.
[89] ZHANG Xianfeng,YUE Qianjin,ZHANG Wenshou,et al.Study on the design of a model experiment for deep-sea S-laying[J].Ocean Engineering,2014,84:194-200.
[90] XIE Peng,YUE Qianjin,PALMER A C.Cyclic plastic deformation of overbend pipe during deepwater S-lay operation[J].Marine Structures,2013,34:74-87.
[91] 朱晓环,岳前进,周雷,等.管道铺设动力耦合作用的混合实验研究[J].船海工程,2014,43(4):86-89. Zhu Xiaohuan,Yue Qianjin,Zhou Lei,et al.Hybrid experimental research on dynamic coupling effect of pipe laying[J].Ship & Ocean Engineering,2014,43(4):86-89.
(编辑:叶秋敏)
Development status and prospect of S-laying mechanical calculation method
Han Duanfeng1Zan Yingfei1Yuan Lihao1Wu Zhaohui2Huang Fuxiang2
(1.CollegeofShipBuildingEngineering,HarbinEngineeringUniversity,Harbin,Heilongjiang150001,China; 2.OffshoreOilEngineeringCo.,Ltd.,Tianjin, 300451,China)
Based on the features of S-laying technologies, research status of static and dynamic calculation methods for pipelines, coupling stress analysis of the pipeline and seabed, and coupling dynamics of the pipeline and tensioner are all discussed. Furthermore, merits and limitations of various methods for pipeline calculation are analyzed and compared. Finally, the paper points out the problems yet to be solved and the research direction for the future, which lays a theoretical foundation for S-laying operation safety and operation efficiency.
S-laying; pipeline statics; pipeline dynamics; calculation method; coupling analysis; development status; technology prospect
1673-1506(2016)06-0099-09
10.11935/j.issn.1673-1506.2016.06.017
*“十三五”国家科技重大专项“大型油气田及煤层气开发(编号:2016ZX05057-020)”、中国海洋石油总公司“十二五”科技重大项目“海洋工程作业安全模拟系统及工程应用研究(首期)(编号:CNOOC-KJ 125 ZDXM 05 GC 00 GC 2013-04)”部分研究成果。
韩端锋,男,教授,2002年毕业于哈尔滨工程大学流体力学专业,获博士学位,主要从事船舶与海洋工程运动仿真研究工作。地址:黑龙江省哈尔滨市南岗区南通大街145号哈尔滨工程大学1号楼(邮编:150001)。E-mail:handuanfeng@hrbeu.edu.cn。
P756.2
A
2016-06-30 改回日期:2016-09-22