The Inverse Kinematics Analysis of Six-DOF Robots
2016-04-26WEIXiao
WEI+Xiao

【Abstract】The kinematics of robots mainly analyses the transformational relation between links and the end-actuator position and orientation of robots, its two kinds of topics mainly include: direct kinematics topic and inverse kinematics topic[1]. This paper mainly researched the inverse kinematics of Six-DOF robots, built Six-DOF robots inverse kinematics model with D-H parameter model, and worked out the robots homogeneous transformation matrix[2]. Now we will build the model and study to the inverse kinematics of RBT-6SO3S which from Jiang Su Hui-Bo Robots Company.
【Key words】Six-DOF Robots; D-H parameter mode; Inverse Kinematics
0Introduction
The kinematics of robots analysis is the most basic and important field in robotics. In the process of solving the problem of direct kinematics and inverse kinematics, the robot's direct kinematics solution is simpler and unique compared to the inverse kinematics solution with complicated and multiple[4]. Thus, solving the problem of inverse kinematics can be more significant.
The kinematics of robots involves the geometrical parameters and timing parameters, usually including the direct or inverse problem of speed, position and acceleration[5]. That is the direct kinematics and inverse kinematics of robot from the traditional meaning. This paper researched the inverse kinematics of Six-DOF robots, firstly analyze and solve to the inverse kinematics of robot, then verify by C language programming and the movement of robot in the actual situation.
1The kinematics analysis of robot
1.1The analysis of robot structure
The links of robot connected by rotation or translation joints, as shown in figure 1. One side of link fixed on the base, and the other side is in a free state which can be installed various instruments to accomplish the robot assignment.
Figure 1The basic structure of robot
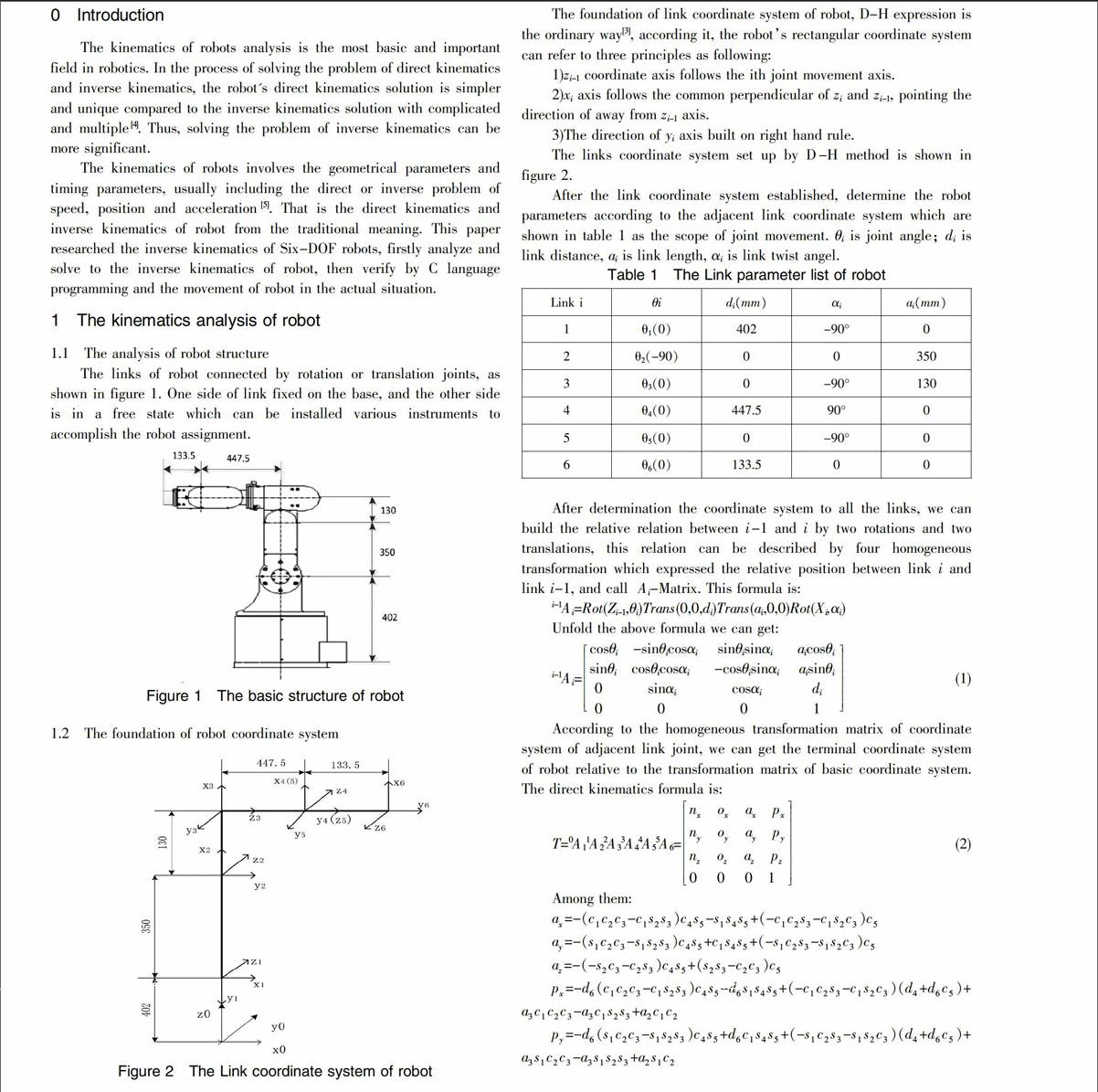
1.2The foundation of robot coordinate system
The foundation of link coordinate system of robot, D-H expression is the ordinary way[3], according it, the robots rectangular coordinate system can refer to three principles as following:
1)zi-1 coordinate axis follows the ith joint movement axis.
2)xi axis follows the common perpendicular of zi and zi-1, pointing the direction of away from zi-1 axis.
3)The direction of yi axis built on right hand rule.
The links coordinate system set up by D-H method is shown in figure 2.
After the link coordinate system established, determine the robot parameters according to the adjacent link coordinate system which are shown in table 1 as the scope of joint movement. θi is joint angle; di is link distance, ai is link length, αi is link twist angel.
Table 1The Link parameter list of robot
After determination the coordinate system to all the links, we can build the relative relation between i-1 and i by two rotations and two translations, this relation can be described by four homogeneous transformation which expressed the relative position between link i and link i-1, and call Ai-Matrix. This formula is:
i-1Ai=Rot(Zi-1,θi)Trans(0,0,di)Trans(ai,0,0)Rot(Xi,αi)
Unfold the above formula we can get:
i-1Ai=cosθi-sinθicosαi sinθisinαi aicosθisinθicosθicosαi -cosθisinαi aisinθi 0 sinαi cosαi di 0
3Inverse kinematics verification
Using several groups of data of θ1~θ6 angular to verify that if the inverse kinematics is right: the first group:(-120,-100,-30,-125, 54.56,36.76); the second group(-120,-60,-30,45,60,-120);the third group(50,-60,35,30,26.2,62) the fourth group(0,-90,0,0,0,0)(that is the original location) using the positive solution formula to get the T-Matrix:
Put T-Matrix data into six inverse kinematics formula (use C language programming to complete) to get inverse kinematics θ1~θ6 angular result and consistent with the angular of direct kinematics[7]. By make the compare with the robot operation interface at last, to verify the reliability of result.
4Conclusion
With the development of the industrial level in our country, the application of industrial automatic equipment is getting more and more widespread. Thus, how to use these automatic equipment to complete industrial mission becomes the completely meaningful research topic. On the basis of known structure parameter of robot, this paper is talking about the typical structure of Six-DOF Robots, using D-H method to build the coordinate system of robot, to get the homogeneous transformation matrix of it, using geometric method to answer the question of inverse kinematics, and using C language programming to verify the reliability of the result.
【References】
[1]Wang S; Mei T; Zhao J H. Kinematics analysis and simulation verification of new six DOF robot arm. Computer Engineering and Design[Z]. Vol. 35, 2014: 3213-3218.
[2]Cai H M; Xing T T. Kinematics Simulation of Industrial Robot Based on MATLAB. ADVANCED MATERIALS. Vol. 41, 2012: 690-696[Z].
[3]Guo F Y ; Mei T; Zhao J H. Problems and Improvement of D-H Method for Establishing Connecting Rod Coordinate System. China Mechanical Engineering, Vol. 25, 2014: 2710-2714[Z].
[4]Angeles, J; Yang, GL; Chen, IM. Singularity analysis of three-legged, six-DOF platform manipulators with URS legs. IEEE Transactions on Mechatronica. Vol. 8. 2003: 469-475[Z].
[5]Dafaoui, EM; Amirat, Y; Pontnau, J; Francois, C. Analysis and design of a six-DOF parallel manipulator, modeling, singular configurations, and workspace. IEEE Transactions on Robotics and Automation. Vol. 14, 1998: 78-92[Z].
[6]A. Gasparetto and V. Zanotto. Optimal trajectory planning for industrial robots. Advances in Engineering Software. Vol. 41, 2010: 548-556[Z].
[7]C. Rossi and S. Savino. Robot trajectory planning by assigning positions and tangential velocities. Robotics and Computer Integrated Manufacturing. Vol. 29. 2013: 139-156[Z].
[责任编辑:杨玉洁]
