基于扩展卡尔曼方法的无速度传感器直接转矩控制
2016-04-23赵晓侠童汝超雷金辉
赵晓侠,童汝超,王 思,雷金辉
(1.昆明理工大学信息与自动化学院,云南昆明 650500;2.云南白药集团股份有限公司,云南昆明 650118)
基于扩展卡尔曼方法的无速度传感器直接转矩控制
赵晓侠1,童汝超1,王 思2,雷金辉1
(1.昆明理工大学信息与自动化学院,云南昆明 650500;2.云南白药集团股份有限公司,云南昆明 650118)
摘要由于无速度传感器感应电机在农业生产、交通运输等方面的应用日益广泛,针对传统直接转矩控制(DTC)存在低频脉动和控制精度差等问题,提出利用扩展卡尔曼滤波器对感应电机控制系统进行状态估计的方法,从而实现无速度传感器直接转矩控制。首先分析应用于感应电机的扩展卡尔曼滤波(EKF)算法,设计了一种基于EKF的观测器,用于同时估计感应电机的转速和负载转矩,由此建立无速度传感器EKF-DTC控制系统。仿真实验结果表明,系统具有较强的鲁棒性。相比传统DTC控制,EKF-DTC控制系统在低频脉动抑制和随动控制性能上有明显改善。
关键词扩展卡尔曼滤波;直接转矩控制;无速度传感器;状态估计;观测器
A Speed-sensorless Direct Torque Control Based on the Extended Kalman
ZHAO Xiao-xia1, TONG Ru-chao1, WANG Si2et al
(1.College of Information Engineering and Automation, Kunming University of Science and Technology, Kunming, Yunnan 650500; 2. Yunnan Baiyao Group Co.Ltd, Kunming, Yunnan 650118)
AbstractSpeed-sensorless induction motor is widely applied in agricultural production and transportation. In order to minimize the ripples and improve the inaccurate speed at low speed in direct torque control system, a novel state estimation algorithm, which is based on the extended kalman filter(EKF), was proposed for sensorless control of induction motor. The application of EKF in asynchronous motor was studied in this paper, and a EKF-based observer was designed to estimate the speed and torque. Finally a direct torque control system based on the extended kalman (EKF-DTC) was constructed. Simulation results showed that the robustness of drive system is enhanced by the proposed algorithm. The results also indicated that the system EKF-DTC has achieved a significant improvement on the performance of the low-frequency ripple suppression and follow-up control compared with traditional direct torque control (DTC) system.
Key wordsEKF; DTC; Speed-sensorless; State estimation; Observer
感应电机具有结构简单、制造方便、价格低廉等优点,近年来在农业领域得到了广泛的应用。目前感应电机的控制技术已经相对成熟,矢量控制和直接转矩控制(DTC)改善了电机的控制性能,在传统的控制策略中,都是将速度传感器测量得到的转速作为反馈量,构成闭环控制系统,以提高控制系统的动态性能[1-2]。但在实际的农业生产应用中,有些场合安装传感器十分困难,增加系统成本的同时还会降低系统的机械强度和可靠性[3-5]。
为解决上述问题,大量学者致力于无速度传感器控制系统的研究[6-7]。近年来,已经有多种无速度传感器控制方案被提出,其中包括模型参考自适应法[8]、凸极转子注入辅助信号法[9-10]、神经网络观测法[11]、滑膜观测法[12]、Luenberger观测器法[13]等。文献[8]提出了一种模型参考自适应系统(MRAS),它以电压模型为参考模型,以包含转速信息的电流模型为自适应模型,通过不断调节自适应模型,使得参考模型和自适应模型输出磁链相等,从而进行转速估计。其转速估计值能以令人满意的动态特性收敛于期望值,但由于存在电压信号的纯积分环节,基于参考模型的转子磁链难以精确合成,尤其是在电机低速运行时。此外,电机在运行过程中,相关参数是变化的,导致该方法的估算准确度并不高。针对低速环境下控制效果不理想的问题,文献[9]中利用向凸极转子注入辅助信号的方法对电机转速进行估计,该方法对电机持续低速运行的动态性能有极大的改进,但是算法本身复杂,估计精度易受电机模型参数变化影响,且高频载波频率将导致转子线棒中的趋肤效应。此外,低通滤波器提取基频相电流将产生一定的相位偏移,降低系统的控制性能[10];并且,该方法需要对电机的转子进行专门设计,这对电机制造商而言是不太会接受的。文献[11]为改善低速以及负载变化时系统的动、静态性能,设计了一种新型转速观测器,观测器通过神经网络在线执行最小二乘法来使估计转速不断逼近电机实际转速。文献中已证明,该观测器在低速和零速、空载和带载条件下,系统都能在合理的误差范围内稳定持续地运行,但是神经网络的研究尚未完全成熟,很多结论都只能通过理论推导证明,文献[11]也仅仅进行了仿真证明,工业应用尚处于起步阶段,还需要一段时间对其进行完善。同时,很多研究人员也考虑到电机参数变化对系统的影响。在文献[12]中,C.Lascu等设计了一种同时对转子磁链和定子电流进行估计的滑膜观测器,该观测器对电机参数变化具有很强的抗干扰能力,但是其对抖振非常敏感,不利于实际运用。文献[13]提出了一种基于转速自适应磁链观测器原理的改进转速估计算法,该观测器实际上是一个估计器,它采用了被控对象的全阶或者降阶模型,并使用了一个含被测对象变量的反馈环,尽管这种观测器能够通过自身设计的参数自适应机构削减电机参数变化的影响,提高转速估计的准确度,但是仍存在有限的参数变化影响(特别是电机定子电阻和转子电阻),这一估算误差在转速趋近于零时尤为明显。
考虑到扩展卡尔曼滤波算法(EKF)的随机性非常适合感应电机模型固有的不确定性和非线性特点[14-17],所以除了运用上述确定性方法设计相应闭环观测器,采用EKF设计观测器也是一个有效的解决方案[4]。EKF可以在考虑系统/过程误差和测量噪声的情况下,在线同时对状态变量和机械参数进行估计[18-19];并且,高收敛速率是EKF的一大显著特点,它能极大地改善系统的瞬态性能[5,16]。鉴于EKF具有以上优点,笔者将EKF算法应用到感应电机无速度传感器直接转矩控制系统中,利用EKF构建系统状态观测器,对感应电机的状态实时估计,并将估计状态值应用于系统的闭环控制,以改善电机控制系统控制性能。
笔者首先详细研究了扩展卡尔曼滤波算法的思想和算法流程;然后根据异步电机的扩展状态方程设计能同时估计异步电机多个状态变量的卡尔曼滤波器,并将设计的卡尔曼滤波器应用于感应电机无速度传感器直接转矩控制系统;接着在Matlab/Simulink平台上,搭建了新型EKF-DTC控制仿真系统,通过试探法不断调整协方差参数,对所设计的EKF进行优化,使系统达到满意的控制效果;最后对传统DTC和新型EKF-DTC在存在各种干扰情况下的仿真结果进行了对比分析。
1扩展卡尔曼滤波算法(EKF)概述
卡尔曼滤波器提供的解决方案是直接关注系统噪声和测量噪声所带来的影响,其误差被视为噪声处理[1]。假设一般的非线性系统状态方程为:

(1)
其中状态变量x⊂Rn,系统输入u⊂Rl,观测变量y⊂Rm,f(x)为状态变量间的非线性映射,h(x)反应状态变量与观测变量之间的非线性映射。随机信号w(t)、v(t)分别是系统噪声和测量噪声,并假设它们均与初始状态x(0)无关,且为相互独立、正态分布的白噪声。

(2)

(3)
其中F(t)为系统矩阵,是f(x)对x求偏导的雅克比矩阵;H(t)为观测矩阵,是h(x)对x求偏导的雅克比矩阵。
为了方便使用递推算法进行数据处理,需要对线性化后的系统动态模型(3)进行离散化[21]。离散化后为:
(4)
通过上述转化将非线性系统转化成线性系统后,便可套用卡尔曼滤波算法的计算过程,由时间更新方程和状态更新方程构成。
时间更新方程:
(6)
(5)
状态更新方程:
(7)
Pk=Pk|k-1(1-KkHk)
(8)
(9)
2基于EKF的异步电机状态估计
2.1异步电机的增广数学模型在α-β坐标系下,取增广状态变量x=[isα,isβ,ψsα,ψsβ,Tl],控制变量u=[usα,usβ],观测变量y=[isα,isβ]。当采样周期很小或负载惯量很大时,负载的变化忽略不计[16],即dTl/dt=0,此时,异步电机的数学模型如下所示:
(10)
电磁转矩方程:
Te=np(isβψsα-isαψsβ)
课程概念根脉 任何一个科学概念都是伴随人类生产活动实践而产生的。有教育现象就有课程,课程的历史源远流长,古今中外众多教育学者提出各自的课程主张。“课程”一词源于拉丁文,意思是“跑道(raceourse)”,西方最常见的课程定义是“学习的进程(course of study)”,简称“学程”[1]。在我国现代汉语词典中,“课程”定义为“学校教学的科目和进程”,“课”则定义为“有计划地分段教学”“教学的科目”“教学的时间单位”“教学的段落”[2]。课与课程是两个相互关联又有区别的概念。
(11)
为了简化计算,忽略摩擦系数,则:
Tl=Te
(12)
2.2基于EKF的异步电机状态估计异步电机的系统状态方程和测量方程如式(13)所示。

(13)
结合式(10)、(11)、(12)可得,系统矩阵:

输入矩阵:

观测矩阵:

经离散化后,上述相关系数阵可以更新为:

同时考虑到过程噪声w(k)和测量噪声v(k),离散化系统方程可改写为

(14)
其中系统噪声w(k)来源于数学模型的近似或系统参数的不确定性以及系统扰动噪声;测量噪声v(k)来源于定子电流、电压的测量误差,其主要由传感器和A/D转换引起的[22],增加这2个矢量更能反映研究对象的真实模型。
此时系统方程依然是非线性的,进行线性化后可得到相应的雅克比矩阵F(k):

电机模型经上述离散化和线性化后,便可以使用EKF算法步骤来对电机相关状态变量进行估计了。在Matlab/Simulink平台上构建EKF电机状态估计器,它主要由一个S-function模块实现。
3系统仿真
3.1建立仿真模型为分析EKF在感应电机无速度传感器控制系统中的性能表现,借助Matlab/Simulink平台构造了基于扩展卡尔曼滤波器的感应电机无速度传感器直接转矩控制(EKF-DTC)系统,仿真电机参数如表1,模型采用ode5仿真算法,步长为1e-5。

表1 感应电机参数
3.2EKF优化在EKF算法中,主要问题是确定增益矩阵Kk,而设计增益矩阵的关键是如何确定Q、R和P的初始值。假设噪声矢量w(k)和v(k)是不相关的,因此可以确定P、Q和R是对角阵。式(6)和(8)表明,误差矩阵P会自动更新,可先设为对角阵,而噪声矩阵R、Q可先设为如下形式,再通过试探法对其各个元素进行选取。
为比较不同R、Q对EKF性能的影响,该研究以实际转速和给定转速的均方根误差(RMSE)为评价控制系统性能的误差性能指标,定义如式(15)所示:
(15)
式中,si为给定转速;ωi为实际转速;n为采样次数,其值为模型仿真时间与采样时间的商。
电机转速ω的变化量远远大于其他状态量的变化量,所以,矩阵Q的η(与速度估计的噪声相关)大于μ、γ是合理的[1]。
表2为试探法获得具有较好性能的R和Q值以及相应的RMSE。从表2可以看出,RMSE始终存在,不管如何改变Q和R值均不能消除,这是因为机械惯性的存在,控制电机不能立刻达到给定值。
图1为表2中5组参数对应的转速响应曲线。由图1可知,尽管实际转速进入稳态时仍存在一定的波动,但是其中一些Q和R值对应的误差范围已小于5%,已经能满足工业生产要求了。
通过上述实验可以看出,噪声矩阵Q和R的初始值对EKF估计的准确度有较大的影响,需要选择这些参数的较优值才能得到EKF较好的滤波性能。

表2 Q、R值对RMSE的影响
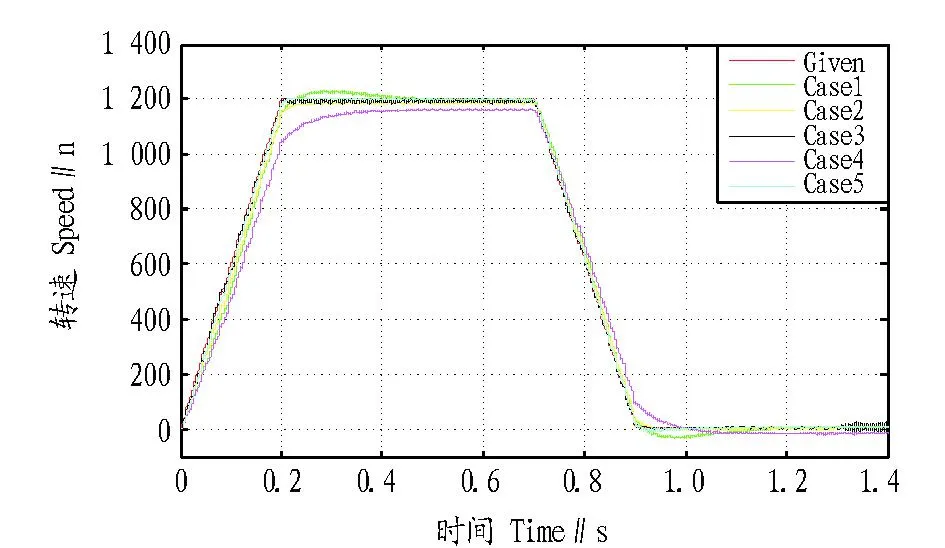
图1 不同Q、R相应的转速曲线Fig.1 Speed of the EKF-DTC with various covariance
3.3结果分析为研究EKF-DTC系统的鲁棒性,选定Q和R后(选择表2中序号2的相关参数),分别在传统DTC和EKF-DTC系统中进行了表3中6个实验。依然选择实际转速和给定转速的RMSE为评价性能指标。
由表3可看出,不论系统存在何种扰动,EKF-DTC的RMSE均比DTC的小,并且其RMSE变化不大,比较稳定,而DTC对于不同的干扰,其RMSE变化较大。这表明使用了EKF算法后,增加了系统的鲁棒性。
实验1主要为验证EKF-DTC的动态性能。图2为其运行结果,由图2可知,EKF-DTC和DTC均能很好跟随系统给定转速,虽然稳态时,EKF-DTC要比传统DTC具有更大的脉动,这是因为在前面EKF推导过程中,为了简化计算,合理地忽略了转子的机械惯性和摩擦系数,这样必定导致反馈的转速估计值滞后于电机真实速度,从而降低了PI调节的响应速度。而EKF-DTC又是根据EKF反馈的速度估计值通过速度调节器(ASR)调节来控制电机,这就造成了EKF-DTC较之传统的光电编码器反馈的DTC动态性能稍弱。但是系统能维持在合理误差范围内,表明EKF-DTC的稳态性能是有保障的,综合考虑成本、安装以及结构等因素,EKF-DTC依然是较佳的控制方案。
实验2主要为分析测量噪声对控制系统的影响,其实验结果如图3所示。在实际工程中,测量误差是不能消除的,所以测量值并不等于真实值,该实验在控制系统的所有检测回路均加了高斯噪声,以模拟实际测量误差。由图3可以看出,当加了测量噪声后,传统的DTC控制系统已经不能达到给定值了,并且控制电机的转速脉动非常大,已经不能满足相应的控制要求了。而EKF-DTC转速依然能较好地跟随给定值,相比于传统DTC,各项指标均有所改善,这是由于EKF-DTC考虑到了系统外部的干扰,在算法中已把这些扰动当做了测量噪音进行了相应的处理,得到相应的估计值,且这些估计值是无偏的,所以EKF-DTC依然能很好地控制系统,这也说明EKF-DTC对检测变量并不敏感,利用此特性,可以在实际工程中省去某些检测环节(尤其是速度检测环节),从而降低系统的复杂性和成本。

表3 不同条件下DTC与EKF-DTC的RMSE

图2 无噪声时转速响应曲线Fig.2 Speeds without noises
实验3、4主要对电机模型参数的敏感性进行分析。在电机实际运行过程中,数学模型不可能与感应电机完全相同,而且电机的相关参数也会随着工作环境、使用年限以及持续运行时间不同而有所变化。如电机运行过程中随着温度改变,电机定、转子电阻值将会改变。实验3、4仿真结果分别如图4中a、b所示,由图4a可看出,当电机定、转子电阻降为0.8倍时,传统的DTC控制系统已完全不能工作,但是由于EKF算法中已将系统参数(定子电阻Rs和转子电阻Rr)变化作为了系统噪声进行了处理,因此EKF-DTC仍然具有很好的控制效果。图4b表明,即使当电机定、转子电阻均升为额定值的1.2倍时,EKF-DTC控制系统仍然能准确地控制电机转速。实验3和实验4表明,在定、转子电阻随着环境变化情况下,EKF-DTC均有较好的控制效果,同时验证了EKF算法对电机的机械参数要求不高的优点。

图3 存在测量噪声时转速响应Fig.3 Speeds with measure noises

图4 存在系统噪声时转速响应Fig.4 Speeds with system noise
图5中a、b分别为实验5、6的仿真结果。由图5可以看出,当同时向系统加入系统干扰和测量噪音后,EKF-DTC的动态和稳态性能均优于传统的DTC,进一步验证了设计方法的有效性。
由图3~5和表3可以看出,由于EKF本身基于最小均方误差的计算方法和高斯噪声在统计意义上的特性,所以该研究设计的EKF-DTC具有很强的抗干扰能力,并且其不受机械参数变化的影响。

图5 同时存在系统噪声测量噪声时转速响应Fig.5 Speeds with system noises and measure noises
4结语
该研究通过在两相静止坐标系下,将感应电机的转速和负载转矩作为系统状态变量,建立了异步电机的状态方程,根据状态方程设计了一种同时估计异步电机多个状态变量的扩展卡尔曼滤波器,将所设计的卡尔曼滤波器应用于直接转矩控制系统,直接利用转速估计值作为电机速度反馈量,构建了EKF-DTC控制系统,同时证明了相关协方差矩阵对滤波器的影响,并提出了合理选取协方差矩阵的策略。仿真实验表明,该研究提出的EKF-DTC控制方案具有很强的鲁棒性,且不受电机参数变化影响,控制性能优于传统的DTC。
参考文献
[1] SHI K L,CHAN T,WONG Y,et al.Speed estimation of an induction motor drive using extended kalman filter[C]//Power engineering society winter meeting.IEEE,2000:243-248.
[2] PAI A D,UMANAND L,RAO N J.Direct torque control of induction motor with extended kalman filter[C]//The third international power electronics and motion control conference.Beijing, China:IPEMC,2000:132-137.
[3] ALONGE F,D’IPPOLITO F,SFERLAZZA A.Sensorless control of induction-motor drive based on robust kalman filter and adaptive speed estimation[J].IEEE transactions on industrial electronics,2014,61(3):1444-1453.
[4] AUGER F,HILAIRET M,GUERRERO J M,et al.Industrial applications of the kalman filter:A review[J].IEEE transactions on industrial electronics,2013,60(12):5458-5470.
[6] JAFARZADEH S,LASCU C,FADALI M S.Square root unscented kalman filters for state estimation of induction motor drives[J].IEEE transactions on industry applications,2013,49(1):92-99.
[7] RASHED M,STRONACH A.A stable back-EMF mras-based sensorless low-speed induction motor drive insensitive to stator resistance variation[J].IEEE proceedings- Electric power applications,2004,151(6):685-693.
[8] MITRONIKAS E,SAFACAS A.An improved sensorless vector-control method for an induction motor drive[J].IEEE transactions on industrial electronics,2005,52(6):1660-1668.
[9] HOLTZ J.Sensorless control of induction machines-with or without signal injection?[J].IEEE transactions on industrial electronics,2005,53(1):7-30.
[10] HOLTZ J.Sensorless position control of induction motors-an emerging technology[J].IEEE transactions on industrial electronics,1998,45(6):840-851.
[11] CIRRINCIONE M,PUCCI M,CIRRINCIONE G,et al.An adaptive speed observer based on a new total least-squares neuron for induction machine drives[J].IEEE transactions on industry applications,2006,42(1):89-104.
[12] LASCU C,BOLDEA I,BLAABJERG F.Very-low-speed variable-structure control of sensorless induction machine drives without signal injection[J].IEEE transactions on industry applications,2005,41(2):591-598.
[13] KUBOTA K,MATSUSE K,NAKANO T.Dsp-based speed adaptive flux observer of induction motor[J].IEEE transactions on industry applications,1993,29(2):344-348.
[14] WADE S,DUNNIGAN M,WILLIAMS B.Comparison of stochastic and deterministic parameter identification algorithms for indirect vector control[C]//Vector control and direct torque control of induction motors.IEEE colloquium on,1995:2/1-2/5.
[15] MANES C,PARASILITI F,TURSINI M.A comparative study of rotor flux estimation in induction motors with a nonlinear observer and the extended kalman filter[C]//Industrial electronics,control and instrumentation,IECON’94,20th International Conference on.IEEE,1994:2149-2154.
[16] BARUT M,BOGOSYAN S,GOKASAN M.Speed-sensorless estimation for induction motors using extended kalman filters[J].IEEE transactions on industrial electronics,2007,54(1):272-280.
[17] CUPERTINO F,LATTANZI A,SALVATORE L,et al.Induction motor control in the low-speed range using EFK-and LKF-based algorithms[C]//Industrial electronics,ISIE ’99.Proceedings of the IEEE international symposium on vol.3.IEEE,1999:1244-1249.
[18] BARUT M,BOGOSYAN O,GOKASAN M.Ekf based estimation for direct vector control of induction motors[C]//IECON 02 [Industrial electronics society.IEEE 2002 28th annual conference of the],Volume 2.IEEE,2002:1710-1715.
[19] BOGOSYAN O,GOKASAN M,HAJIYEV C.An application of EKF for the position control of a single link arm[C]//Industrial electronics society.IECON ’01.The 27th annual Conference of the IEEE,Volume 1.IEEE,2001:564-569.
[20] BISHOP G,WELCH G.An introduction to the kalman filter[C]//Proc of SIGGRAPH,Course.Los Angeles,CA,2001.
[21] WEI Z,SHENG C W.Flux observer for field oriented induction motors based on EKF[C]// Software technology and engineering(ICSTE). 2nd international conference on ICSTE,2010.
[22] GULDEMIR H,BRADLEY K.An improved approach to the prediction of line current spectrum in induction machines[J].Electrical engineering,2003,86(1):17-24.
中图分类号TP 273
文献标识码A
文章编号0517-6611(2016)06-303-06
收稿日期2015-12-14
作者简介赵晓侠(1965- ),女,云南昆明人,副教授,硕士生导师,从事自动化应用系统的研究。
基金项目国家自然科学基金项目(KKGD201303043)。
