人群简化模型与人行桥TMD参数设计研究
2016-04-15刘伟庆李枝军
孙 昊, 周 叮, 刘伟庆, 李枝军
(南京工业大学 土木工程学院,南京 211816)
人群简化模型与人行桥TMD参数设计研究
孙昊, 周叮, 刘伟庆, 李枝军
(南京工业大学 土木工程学院,南京211816)
摘要:用两段连续弹性杆模拟静立人体,建立人群-人行桥-调谐质量阻尼器(TMD)振动系统。将静立人群简化建模为单个的广义人体,研究广义人体-人行桥-调谐质量阻尼器振动系统的动力特性及TMD参数设计。运用最小二乘原理确定广义人体的相关参数,通过与已有的实验数据对比,验证了将静立人群简化为广义人体模型的正确性。以均方根加速度作为人体舒适度的优化准则,分析了人行桥TMD的最优频率比和最优阻尼比。
关键词:人群-人行桥-TMD系统;广义人体-人行桥-TMD系统;最小二乘;最优频率比;最优阻尼比
随着建筑结构技术的迅速发展和高性能建筑材料的广泛运用,人行桥正向大跨轻柔低阻尼的方向发展,人行桥的人致振动问题也因此日益突出。在主体结构下附加一个由弹簧、阻尼器和质量块构成的TMD装置,通过合理的参数设置可以减小或消除主体结构的有害振动。TMD主要适用于激励力接近于谐振的情况,人体的脚步力具有拟周期性,人行桥的动力响应主要与桥的竖向基阶模态相关[1],因此,TMD适用于人行桥的减振控制。
与歌剧院楼盖、赛场看台一样,划船比赛沿线、烟花施放场所、公园景点和城市风光带的人行桥上常常会聚集大量的站立人群。Ellis等[2]对Twickenham体育馆的测试结果表明驻留人群应作为单自由度的质量-弹簧-阻尼器系统来考虑。静立人群和行走人群对人行桥的影响是不同的,静立人群会改变人行桥的动力学特性而行走人群会激发人行桥产生振动。目前,研究者已认识到有人驻留时系统的阻尼会有所增加[3],而固有频率可能增大也可能减少。然而,采用TMD实现人行桥减振控制的常规设计方案往往不考虑人体对人行桥的作用或者只是将人体考虑为附着于人行桥上的刚性质量,忽略人体弹性对人行桥动力特性的影响。因此,常规设计方案对人行桥的减振控制是不全面的。
本文利用生物力学相关知识,将静立人体模拟为两段连续弹性杆附加到人行桥上,将行人对人行桥的激励简化为作用于人行桥跨中的简谐力,用以表达静立人群和行走人群对人行桥的不同作用,建立了人群-人行桥-TMD系统与广义人体-人行桥-TMD系统的控制微分方程组。通过对两个系统方程组的比较分析,将人群简化为单个的广义人体模型。运用最小二乘原理确定广义人体的相关参数。人体的不适反应主要来自振动加速度,因此使用均方根加速度法对TMD进行参数优化。
1人群-人行桥-TMD动力模型


图1 人群-人行桥-TMD模型Fig.1 The model of crowd-footbridge-TMD system
人行桥的动力响应主要与人行桥的竖向基阶模态[1]有关,将人行桥的竖向位移近似为:
uS(x,t)=φ1(x)q1(t)
(1)
只考虑人体的基阶模态并忽略人体脚部弹性与阻尼的影响,第j个静立人体的竖向位移可表示为:
uHj(y,t)=uS(xj,t)+uRj(y,t)=
φ1(xj)q1(t)+uHRj(t)φ(y)
(2)
式中,φ1(x)和q1(t)分别为人行桥的竖向基阶模态函数和模态坐标,uS(xj,t)为距离桥左端xj处人行桥的竖向位移,uRj(y,t)为第j人相对于人行桥的竖向位移,φ(y)为人体竖向振动的基阶模态函数。
人群-人行桥-TMD系统的势能为:

(3a)
人群-人行桥-TMD系统的动能为:

人群-人行桥-TMD系统的阻尼耗能为:

(3c)
行人脚步力做功为:
W=PS(t)φ1(L/2)q1(t)
(3d)
受迫振动的拉格朗日方程为:
(4)
将式(3a)~(3d)代入式(4)可得:

[K]{X(t)}={P(t)}
(5)
式中:{P(t)}={PS(t)φ1(L/2),0,0,…,0,0}T,
{X(t)}={q1(t),uHR1(t),uHR2(t)…uHRJ(t),uT(t)}T,


以及下列参数:




式中MS1、KS1、CS1分别为人行桥的竖向基阶模态质量、模态刚度、模态阻尼,MH0为人体总质量,MH为人体的模态质量,MH1为人体与人行桥的耦合质量。当不考虑TMD时,式(5)自动蜕化为人群-人行桥系统的控制微分方程组。
2人体的模态参数
由生物力学知识可知,人体可用分段的连续弹性直杆近似模拟[5],本文采用简单的两段直杆模型,设每段直杆的质量均布,沿竖直方向的刚度也均布,如图2所示。
每个直杆的轴向振动微分方程为:
(6)
式中,mi和ki(i=1,2)为每段杆件的单位长度质量和轴向刚度。
式(6)的解为:
ui(x,t)=Usin(ωHt+φi)φi(x),i=1,2
(7)
式中:ωH为人体振动的角频率,φi为相位角,φi(x)为模态,U为振动幅值。人体模型底部固定于人行桥上,顶部自由,利用上下两段直杆连接处的变形协调条件,可以导出人体的模态。
φ1(x1)=Bsinb1x1,0≤x1≤h1,φ2(x2)=

0≤x2≤h2
(8)


图2 人体竖直方向的振动模型Fig.2 The model of a body vibrating in vertical direction
得到人体的频率方程为:
(9)

考虑h1=h2并取m2=2m1,k2=2k1,该参数可较好地模拟人体[5]。由此导出特征值b1h1=0.615 5和人体的各等效质量为:MH1=0.765 9 MH0,MH=0.666 7 MH0。
3广义人体-人行桥-TMD模型

图3 广义人体-人行桥-TMD模型Fig.3 The model ofgeneralized human-footbridge-TMD system
广义人体-人行桥-TMD的耦合动力模型如图3所示。考虑一具有分布质量mG(x),分布刚度kG(x),分布线性黏滞阻尼cG(x),高度为HG的广义人体模型。设广义人体静立在人行桥的跨中。人行桥、TMD、荷载等条件与第1节相同,广义人体同样用分段连续弹性直杆模拟。仅考虑人行桥与广义人体的基阶模态,采用与第1节类似的分析过程,得到:


(10)
式中:




以及下列参数:


式中:MGH0为广义人体的总质量,MGH为广义人体的模态质量,MGH1为广义人体与人行桥的耦合质量。当不考虑TMD时,式(10)蜕化为广义人体-人行桥系统的控制微分方程组。
4广义人体的模态参数

设J个静立人体沿着人行桥跨中对称站立,人体间距为0.5 m,由上述数据可得人群-人行桥系统的控制微分方程组为:
(11)
将人群简化为广义人体模型的关键是使人行桥的加速度响应在简化前后保持一致。对比式(5)和(10)可发现当广义人体与单个人体取如下关系时,两公式相近:
MGH=MH,MGH1=θMH1(θ为待定系数),KGH=KH,CGH=CH
根据上述数据参数,广义人体-人行桥系统的控制微分方程组可转化为:

(12)
5θ的确定与广义人体模型的验证
式(11)、(12)中的质量矩阵为非对角阵,因而无法通过经典的模态分解法进行解耦。本文采用等时间步长的有限差分法近似计算[12],速度和加速度的中心差分可表示为:
(13)
(14)
将式(11)和(12)代入式(13)、(14)可以得到中心差分的迭代公式:
(15)
(16)
为了达到足够的计算精度与收敛性,本文取时间步长Δt=0.01 s。
基于最小二乘原理,在给定静立人数J后确定θ的方法为:在合理的θ取值范围内,使得人群-人行桥与广义人体-人行桥两个系统中人行桥跨中加速度差的平方在一个周期内的和积分最小。即:
(17)
表1给出了不同静立人数下的θ值。可以发现,随着静立人数J的增大,θ值也相应增大,但θ始终小于静立人数J。这表明θ是由人行桥基阶模态和各个人体的位置所决定的,而不是J个静立人体的简单叠加。
将不同静立人数J所对应的θ值代入式(12)中,参考文献[13]的解析解可求出广义人体-人行桥系统的竖向基阶模态频率和竖向基阶模态阻尼比。

表1 不同静立人数下的θ值
表2给出了本文数值模拟结果与王海等[3]的人-梁模型及Sachse实验结果的比较。由于实验测得的人群-人行桥系统的基阶频率离散性较大,Sachse没有给出其具体数值只是说明随着简支梁上静立人数的增加,系统的基阶频率随之下降[6-7],这一定性趋势与本文的计算结果相同。通过对受迫振动实验得到的复频反应函数进行曲线拟合,Sachse识别出了系统的竖向基阶模态阻尼比,该结果与本文的计算结果较为接近。相对于王海、周叮的结果,本文系统的竖向基阶模态频率略有下降但阻尼比略有增加,这主要来自于二者的模型差异以及对人体阻尼比的取值不同。由此可见将人群简化为单个的广义人体模型是正确的。
图4表明人群-人行桥系统与广义人体-人行桥系统中人行桥跨中的加速度响应一致性很好。

图4 简化前后人行桥跨中加速度响应对比Fig.4 The comparison of acceleration time history at the midspan of footbridges before and after simplifying

静立人数J系统的竖向基阶模态频率广义人体-人行桥人-梁人群-人行桥计算值/Hz 计算值/Hz实验系统的竖向基阶模态阻尼比广义人体-人行桥人-梁人群-人行桥计算值/%计算值/%实验值/%14.44524.479基频随人数0.6280.5980.654.34144.362增加而下降1.8541.6801.7
6TMD的参数优化
Den Hartog[14]给出了TMD的最优频率比和最优阻尼比为:
(18)
根据式(10)和第4节的相关数据,取步频fP在正常步频范围(1.6~2.4 Hz)内变化,广义人体-人行桥-TMD系统的控制微分方程组为:
(19)
将式(19)和广义人体的相关参数代入式(16),可得到关于步频fp、质量比μ、频率比β、阻尼比ξT的广义人体-人行桥-TMD系统的时程解。
在正常步频范围内,固定质量比μ,以行人引起的人行桥最大均方根加速度最小作为准则[15]来确定最优频率比βopt和最优阻尼比ξT,opt。识别准则:
(20)

均方根加速度为:
(21)
表3给出了不同静立人数J和质量比μ下TMD的最优参数。通过对比发现,考虑静立人体的弹性后,TMD的最优频率比总是小于Den Hartog的解析解,而TMD的最优阻尼比总是小于等于Den Hartog的解析解。表3还表明,当静立人数J不变时,本文识别出的最优频率比随着质量比μ的增大而减小,但最优阻尼比会增大。当质量比μ不变时,本文识别出的最优频率比随着静立人数J的增大而减小。

表3 广义人体-人行桥-TMD系统的

考虑人群脚步力的前二阶谐波,图5~7给出了静立人数为5或15人时的计算结果。图5、图6表明在正常步频范围内,TMD的减振效果比较明显。安装TMD后,人行桥跨中的加速度响应被均匀化,在某些步频下的减振效果尤为突出。图7表明本文识别出的TMD最优参数的减振效果要优于Den Hartog的解析解,当静立人数较多时减振效果更好。对于有大量驻立人群的景观桥,本文的参数更为合理。

图5 正常步频范围内TMD的减振效果Fig.5 The effects of reduced vibration of TMD in the range of normal step frequencies
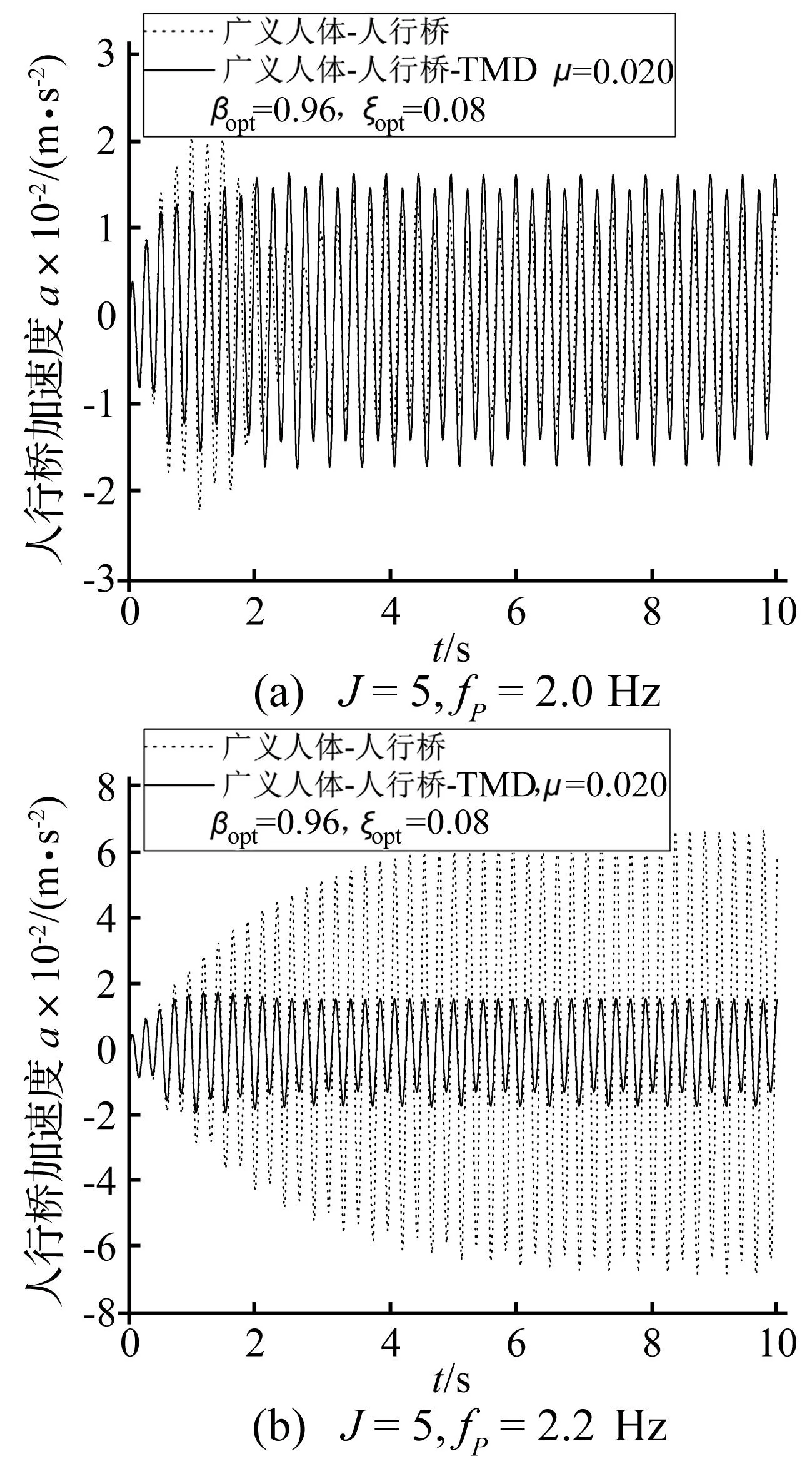
图6 安装TMD前后人行桥跨中加速度时程响应对比图Fig.6 The comparison of acceleration time history at the midspan of footbridges with and without TMD
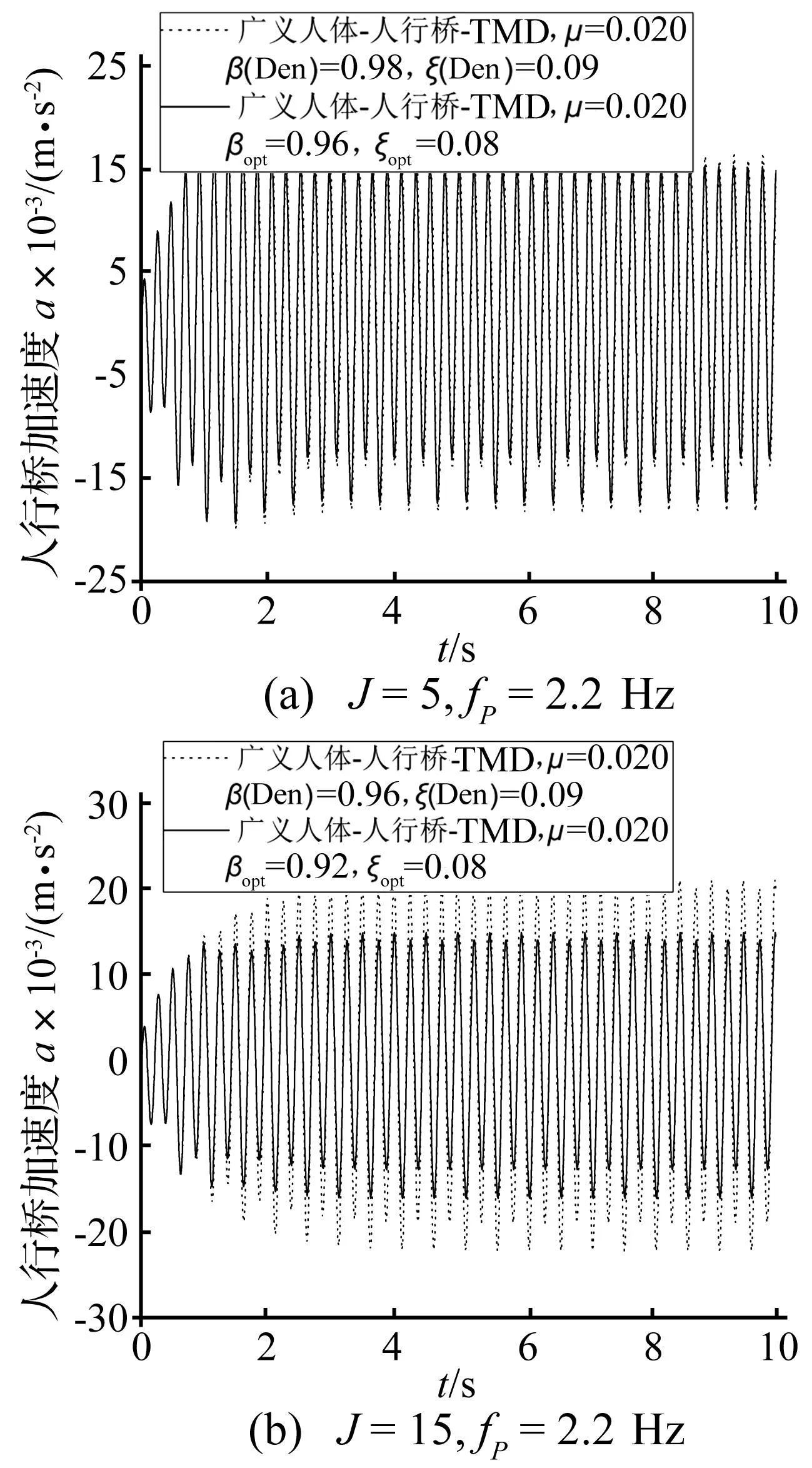
图7 不同最优参数下人行桥跨中加速度的时程响应对比图Fig.7 The comparison of acceleration time history at the midspan of footbridges with different optimal parameters
7结论
本文针对大跨人行桥TMD设计中的不足,提出在人行桥-TMD系统的基础上考虑静立人体的弹性,分别建立人群-人行桥-TMD模型和广义人体-人行桥-TMD模型,得到如下结论:
(1) 将人群简化为单个的广义人体模型降低了系统的自由度,使得考虑人群-人行桥相互作用变得简单。
(2) 运用最小二乘原理,广义人体的相关参数可由人体的相关参数、人行桥基阶模态和各个人体的位置确定。
(3) 考虑静立人体的弹性后,TMD的最优频率比总是小于Den Hartog的解析解,而TMD的最优阻尼比总是小于等于Den Hartog的解析解。当静立人数J不变时,本文识别出的最优频率比随着质量比μ的增大而减小,但最优阻尼比会增大。当质量比μ不变时,本文识别出的最优频率比随着静立人数J的增大而减小。
(4) 安装TMD后,人行桥跨中的加速度响应被均匀化。对于城市风光带处的人行桥,本文的最优参数效果更合理。
参 考 文 献
[ 1 ] 陈宇,樊健生,聂建国.多跨人行桥振动的均方根加速度反应谱法[J]. 土木工程学报,2010,43(9):117-124.
CHEN Yu, FAN Jian-sheng, NIE Jian-guo. RMS acceleration response spectrum method for multi-span footbridge vibrations under pedestrian load [J]. Journal of Civil Engineering, 2010, 43(9): 117-124.
[ 2 ] Ellis B R, Ji T. Human-structure interaction in vertical vibrations [J]. Proceeding of the ICE: Structures and Buildings, 1997, 122(1): 1-9.
[ 3 ] 王海,周叮,王曙光.人-梁相互作用动力学模型研究[J]. 工程力学,2010,27(5):14-20.
WANG Hai, ZHOU Ding, WANG Shu-guang. Modeling of the dynamic interaction of human occupants and beam [J]. Engineering Mechanics, 2010, 27(5): 14-20.
[ 4 ] 闰兴非,孙利民,袁旭斌,等.人行桥人致振动问题的计算模型对比分析[C]//中国振动工程学会.第八届全国振动理论及应用学术会议论文集.上海:中国振动工程学会,2003年,1-8.
[ 5 ] Ji T. A continuous model for the vertical vibration of the human body in a standing position[C]// United Kingdom Informal Group Meeting on Human Response to Vibration. Bedford, UK: 1995.
[ 6 ] Sachse R. Modeling effects of human occupants on modal properties of slender structures [J]. The Structural Engineer, 2002, 80(5): 21-23.
[ 7 ] Sachse R. The influence of Human occupants on the dynamic properties of slender structures PHD [D]. Sheffield,UK: The University of Sheffield, 2002.
[ 8 ] Ebrahimpour A, Hamam A, Sack R L,et al. Measuring and modeling dynamic loads imposed by moving crowds [J]. Journal of Structural Engineering,1996, 122(12): 1468-1474.
[ 9 ] 孙利民,闫兴非. 人行桥人行激励振动及设计方法[J]. 同济大学学报:自然科学版,2004,32(8):996-999.
SUN Li-min, YAN Xing-fei. Human walking induced footbridge vibration and its serviceability design[J]. Journal of Tongji University: Natural Science, 2004, 32(8): 996-999.
[10] Matsumoto Y, Nishioka T, Shiojiri H, et al. Dynamic design of footbridges[M]. Zurich: IABSE, 1978.
[11] Sachse R, Pavic A, Reynolds P. Human-structure interaction in civil engineering dynamics: a literature review [J]. The Shock and Vibration Digest, 2003, 35(1): 3-18.
[12] Chopra A K.结构动力学:理论及其在地震工程中的应用[M]. 谢礼立,吕大刚,译.北京:高等教育出版社,2007.
[13] Zhou Ding, Ji Tian-jian, Liu Wei-qing. Dynamic characteristics of a standing human on a SDOF [J]. Advances in Engineering, 2012, 11(1): 85-98.
[14] Den Hartog J P. Mechanical vibrations [M]. New York: Dover Publications, 1947.
[15] 樊健生,陈宇,聂建国.人行桥的TMD减振优化设计研究[J]. 工程力学,2012,29(9):133-140.
FAN Jian-sheng, CHEN Yu, NIE Jian-guo. Optimum design of tuned mass damper for footbridge[J]. Engineering Mechanics, 2012, 29(9): 133-140.
Simplified model of human crowd and parameter design of TMD for footbridges
SUNHao,ZHOUDing,LIUWei-qing,LIZhi-jun
(College of Civil Engineering, Nanjing Tech University, Nanjing 211816, China)
Abstract:Here, a continuous-elastic bar with two segments was used to model bodies standing on a footbridge and the crowd-footbridge-tuned mass damper (TMD) vibration system was built. By simplifying the static crowd as a generalized human body, the dynamic characteristics of the generalized human body-footbridge-TMD system and the parameter design of TMD were studied. The parameters of the generalized human body were identified with the principle of least square. Comparing with the data available from tests, the correctness of the simplified generalized human body was verified. The root-mean-square acceleration was taken as the optimization criterion to assess the human body comfort, the optimal parameters of the TMD were analyzed.
Key words:crowd-footbridge-TMD system; generalized human body-footbridge-TMD system; least square; optimal frequency ratio; optimal damping ratio
中图分类号:TU3;TB1
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.04.035
通信作者周叮 男,博士,教授,博士生导师,1957年生
收稿日期:2014-07-14修改稿收到日期:2015-01-20
基金项目:国家自然科学基金(11372127;51208252);江苏省属高校自然科学研究重大项目(12KJA580002)
第一作者 孙昊 男,硕士生,1989年生
E-mail:dingzhou57@yahoo.com
