多传感器航迹融合在指挥自动化系统的应用
2016-04-14杨欧
杨 欧
(中国人民解放军海军701工厂 研发部,北京 100015)
多传感器航迹融合在指挥自动化系统的应用
杨欧
(中国人民解放军海军701工厂 研发部,北京100015)
摘要文中对多传感器航迹融合技术的基本原理和信息流程等进行了介绍,并对航迹融合技术在指挥自动化系统中的应用做了进一步分析与说明。根据多传感器航迹融合后的锯齿状特点,提出了通过滤波技术进行航迹处理的方法,实现了融合后航迹的平滑。多传感器航迹融合技术为指挥自动化系统中的指挥决策提供了丰富的情报信息,提高了决策效率。
关键词多传感器;航迹融合;AIS;指挥自动化
Application of Multi-Sensor Track Fusion in Command Automation System
YANG Ou
(Department of R&D,No.701 Factory of PLA (N),Beijing 100015,China)
AbstractIn this paper,the basic principle and technology of multi-sensor track fusion information process are introduced with a further analysis and illustration of the track fusion technology in the application of command automation system.Based on the serrated features after multi-sensor track fusion,we propose the use of the filtering technology to track processing for smooth tracks after fusion.The multi-sensor track fusion technology provides abundant information for command decision in the command automation system,thus higher decision-making efficiency.
Keywordsmulti-sensor;track fusion;AIS;command automation system
航迹融合技术是指挥自动化信息处理中的关键技术,该技术将传感器探测到的目标航迹进行综合处理,形成统一的综合态势。多传感器航迹融合,是对空间分布的多源传感器信息进行综合处理,对多传感器探测到的目标航迹进行野值剔除、时间配准、坐标转换后送融合中心,融合中心综合所有传感器的航迹数据进行传感器目标航迹的融合、关联等多功能处理,以更高的精度、概率或置信度得到所需要的目标状态和身份估计,及完整、及时的态势和威胁评估,为指挥员提供决策信息[1-4]。
在指挥自动化系统中,大多数信息管理问题都需要有效地进行数据融合处理,且把各种不同的数据集成为战略与战术局势的一致性表示。指挥自动化系统采用了先进的电子技术、计算机技术、传感器技术,目标环境信息的综合程度越来越高。只有通过有效的数据融合技术才能从各个传感器和其他方面获得的信息准确自动合成,减少信息损失,提高环境态势合成度,给指挥员提供准确的辅助决策[5-9]。本文以对海上目标的探测的指挥自动化系统为例,介绍多传感器航迹融合在指挥自动化系统中的应用。
1航迹融合对指挥系统能力的提升
在指挥自动化系统中,有多种传感器实现对目标的探测,目标信息的来源越来越丰富。以对海上目标的探测为例,既可主动通过雷达对目标进行探测,也可接收海上目标发送的AIS(Automatic Identification System)信息对目标的位置、航向航速、国籍、类型等属性进行探测。多传感器航迹融合技术对指挥自动化系统能力的提升主要有以下几个方面:(1)多传感器航迹融合中,由于多传感器同时工作,即使个别传感器失效,受到干扰或失去对目标的覆盖,其仍能得到足够的目标信息,可有效提高探测到目标的数据率,从而使系统的可靠性增强;(2)经过对多传感器探测信息的融合,可有效提高融合后目标的方位精度和距离精度,提高指挥自动化系统中信息的置信度;(3)通过雷达航迹与AIS信息的关联融合,可提高雷达探测目标的国籍、类型识别率,同时可通过AIS中的其他信息更准确地预测目标的运动状态,为指挥员指挥和决策提供有效依据。
2多传感器航迹融合信息处理流程
航迹融合的正确与否直接关系到其他融合的正确性。在航迹融合过程中,需要考虑各种各样情况,如目标属性、目标特征、威胁度、批号、各传感器站点的情况等,因此应根据相应条件设计航迹融合算法[10]。本文主要采用“基准航迹关联法”完成对海雷达航迹之间、雷达航迹与AIS信息间的关联融合。
航迹信息的预处理模块主要包括:坐标转换、时间配准、野值剔除、航迹滤波等。由于每个传感器分别在不同地点。因此,需将每个站点目标的测量坐标值转换到融合中心的测量坐标系里;每个雷达的观测时刻和时间间隔也不同,所以需要对不同的雷达数据进行时间配准。同时还须根据海上目标的运动特性,对目标航迹进行野值判断,对目标航迹下一点的位置进行预测等[11-12]。

图1 多传感器航迹融合预处理流程图
航迹处理过程中,航迹信息关联融合模块通过航迹关联判断两条航迹是否来自于同一目标,然后对已关联上的航迹按照一定的准则进行合并,以形成系统航迹,并对融合后的航迹状态和协方差进行计算,以便对航迹更新[13]。融合航迹管理用于管理融合后各传感器航迹的批号对照表。航迹关联融合信息流程如图2所示。

图2 多传感器航迹关联融合流程图
3航迹融合在对海指挥系统中的应用
图3是对海指挥自动化系统中多传感器航迹融合的效果图。通过多传感器航迹融合,将来自雷达1的原始航迹和来自雷达2的原始航迹融合后,形成了融合航迹。从图中可以看出,融合航迹的航迹点比原始雷达航迹的航迹点更密,说明经过融合,融合航迹显著提高了目标的数据率,有效增强了指挥自动化系统的可靠性。
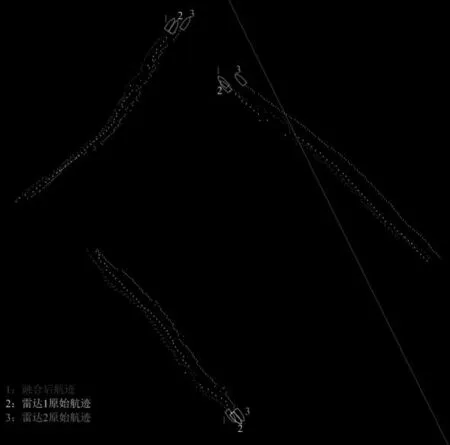
图3 多传感器航迹融合效果图
由于雷达航迹是指挥自动化系统中的雷达通过发射、接收电磁波探测到的,存在一定的系统误差;而目标AIS信息是指挥自动化系统被动接收的,AIS信息在指挥自动化系统中不存在误差。通过将AIS信息作为真值,比较雷达原始航迹、融合后航迹与目标AIS信息的方位精度、距离精度,得到融合后航迹的方位精度、距离精度均小于其中一个雷达原始航迹的方位精度、距离精度,即融合后目标航迹的准确度与雷达航迹相比有所提高,增强了指挥自动化系统信息的置信度。
如图4所示为雷达1原始航迹、雷达2原始航迹和AIS目标信息通过多传感器航迹融合后形成融合航迹。通过雷达航迹与AIS信息的关联融合,可利用AIS信息中的国籍、类型等信息提高对雷达目标的国籍、类型识别率;利用AIS信息提供的目标长度、类型和吃水等数据弥补雷达航迹数据在准确度、分辨力和可靠性上的缺陷,求得更加准确、可靠的目标位置,提高指挥自动化系统的可靠性;利用AIS信息提供的目标目的地、预计到达时间、等数据进一步了解船舶的操作意图,以指导指挥自动化系统中的雷达在目标跟踪中更准确地预测目标运动状态[13]。

图4 多雷达航迹和AIS关联融合效果图
由于融合航迹采用多传感器的位置信息,如果不对融合后航迹进行处理,则融合航迹会出现明显的锯齿状,如图5所示。因此需要对多传感器航迹融合后的融合航迹进行平滑处理,图4中的融合航迹已经过卡尔曼滤波算法处理[14]。
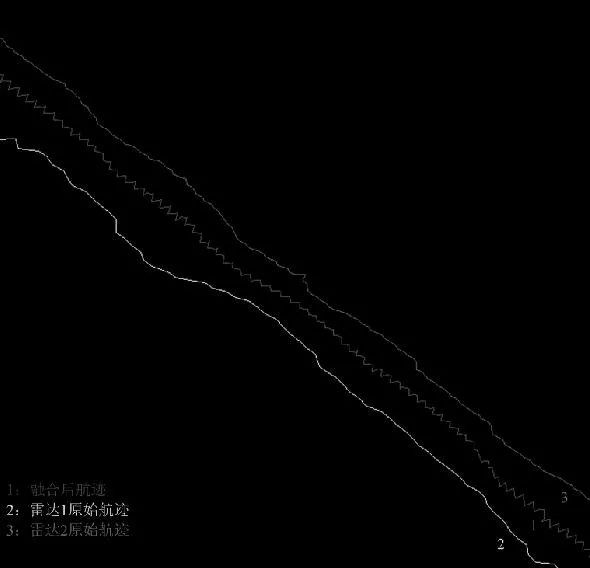
图5 多传感器航迹融合后未处理时的锯齿状融合航迹
通过以上实际应用可见,多传感器的航迹融合形成融合航迹,融合航迹包含多种传感器探测到的目标信息,在指挥自动化系统中形成了多传感器的统一态势,指挥员可根据融合航迹中包含的各种情报信息进行指挥决策,大幅减轻了工作强度,提高了决策效率。
4结束语
多传感器航迹融合技术是指挥自动化系统中重要的信息处理技术,本文对多传感器航迹融合技术对指挥自动化能力的提升,多传感器航迹融合技术的信息处理流程和多传感器航迹融合技术在对海指挥自动化系统中的应用做了介绍和研究,并通过滤波技术实现对融合后航迹的平滑处理,经实际数据验证,取得了较好的融合效果,对指挥自动化系统的能力有明显提升。
参考文献
[1]郝润泽,杨瑞朋.多传感器数据融合技术研究现状及军事应用[J].武器装备自动化,2007,26(4):16-23.
[2]乔向东,李涛.多传感器航迹融合综述[J].系统工程与电子技术,2009,31(2):245-250.
[3]刘炯明.数据融合及其应用[M].北京:国防工业出版社,1999.
[4]吴显亮,官慧峰,尹良泽.多雷达系统数据融合与航迹预测[J].数学的实践与认知,2010,40(15):160-173.
[5]李佑禄,霍文军,王浩,等.雷达指挥自动化系统设计与实现[J].装备指挥技术学院学报,2007,18(4):111-115.
[6]单连平,王亚,吴维元.指挥自动化系统现状与发展趋势[J].指挥控制与仿真,2007,29(3):1-5.
[7]李德毅,曾占平.发展中的指挥自动化[M].北京:解放军出版社,2004.
[8]赵维康,那丹彤,孙德轶.指挥自动化信息融合测试评估系统的设计[J].气象水文海洋仪器,2008(2):26-34.
[9]杨俊强,毛征,张志,等.雷达航迹融合算法验证系统设计[J].国外电子测量技术,2009,28(11):63-66.
[10]邵伟,孟秋池,龚丹丹.多传感器数据融合与航迹预测[J].数学的实践与认知,2010,40(15):151-159.
[11]徐毓,金以慧.多传感器异步关联航迹的融合[J].系统工程与电子技术,2003,25(11):1318-1340.
[12]田雪怡,李一兵,李志刚.航迹融合算法在多传感器融合中的应用[J].计算机仿真,2012,29(1):53-56.
[13]于海霞.AIS与雷达数据融合方法的研究[D].大连:大连海事大学,2006.
[14]刘健波,王运锋.分布式雷达航迹融合关键技术研究[J].四川大学学报:工程科学版,2006,38(6):119-122.
中图分类号TP212.4
文献标识码A
文章编号1007-7820(2016)03-083-03
doi:10.16180/j.cnki.issn1007-7820.2016.03.021
作者简介:杨欧(1978—),男,工程师。研究方向:指挥自动化,信息融合。
收稿日期:2015- 07- 13