GLONASS星历电文特征及其解算方法
2016-04-13饶爱水李清梅
饶爱水,刘 冰,李清梅,张 龙
(中国卫星海上测控部,江阴 214431)
GLONASS星历电文特征及其解算方法
饶爱水,刘 冰,李清梅,张 龙
(中国卫星海上测控部,江阴 214431)
针对飞行试验中由于GLONASS星历解算错误导致的定位结果异常问题,研究了GLONASS星历电文下传的基本特征,即通过第1~4串电文下传,并且一个更新周期内下传60组数据完全相同的星历。基于此,提出了基于电文串标识的GLONASS星历解算基本算法,但发现该算法在电文串丢失且发生星历更新时解算出错误星历的问题。为确保星历来源于连续的1~4串电文,提出了基于时间比较的星历解算改进算法,发现GLONASS星历更新时,不保证从第1串开始,也不保证在连续的1~4串电文中更新完毕,改进算法依然无法确保获取到正确星历。最后分析了星历电文误码时的特征,提出了基于星历合法性检测的星历解算可靠算法,该算法综合考虑卫星不健康、星历更新以及电文误码等异常情况,采用轨道特性检测法和原码比对检测法验证星历合法性,采用电文串标识法充分利用有效电文数据。试验结果表明,该算法的星历误码识别率达到100%,星历更新异常识别率达到100%,获取的GLONASS星历数据正确率到100%。
电文误码;星历合法性;卫星不健康;星历更新;轨道特性
星历参数是卫星导航系统提供给地面用户最重要的参数,从导航电文中解算星历参数,是用户定位的前提。卫星导航系统由于自身发展需要,电文格式不断优化调整,星历参数下传的内容、方式和波道编排也不断发展[1]。一组完整星历参数通常需要多个子帧下传,如GPS星历通过3个子帧下传[2],GLONASS星历通过4个子帧(也称串)下传[3]。星历更新或子帧丢失时,如何判断多个子帧来源于同一组星历是解算星历的前提。通过判断GPS星历子帧的数据龄期,容易判断3个子帧是否源于同一组星历,而GLONASS星历无此安排,由此造成了星历解算的问题。由于星历解算错误导致定位异常的问题多有发生。目前电文研究着重于电文结构[4-5]、编解码算法[6]、电文捕获算法[7-9]等方面,对电文参数实际下传的时序特征及其解算方法尚缺乏研究。本文以GLONASS星历解算方法为目标,研究了GLONASS星历下传的时序特征,以及如何及时准确地从电文中获取到正确的GLONASS星历。
1 GLONASS星历内容及其基本时序
GLONASS星历参数通过导航电文的第1到第4串下传,如表1所示。星历参数下传的基本时序为:第1串下传星历的X位置、X速度、X加速度、即时数据更新标志;第2串下传星历的Y位置、Y速度、Y加速度、星历时间和卫星健康标志;第3串下传星历的Z位置、Z速度、Z加速度;第4串下传星历的更新标志、卫星号等。
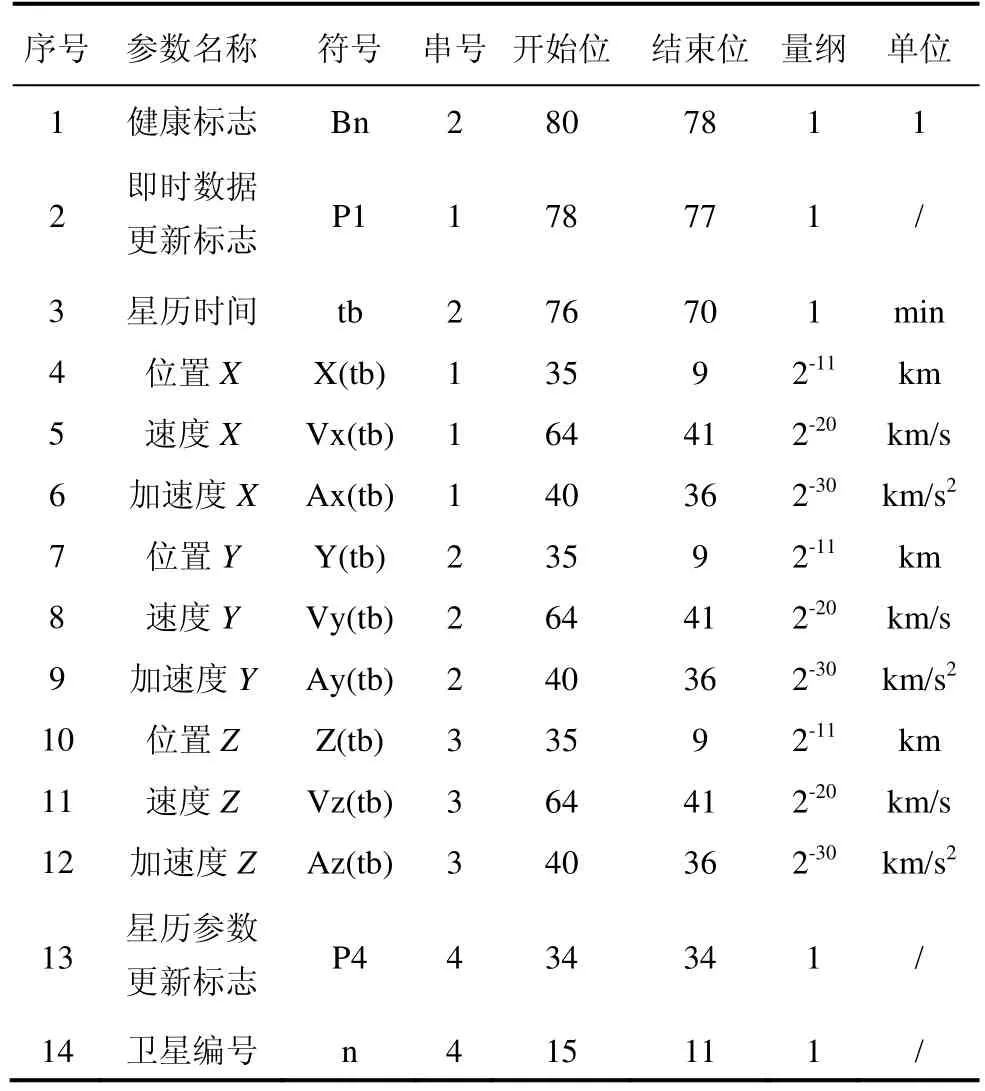
表1 GLONASS星历内容及其下传电文Tab.1 Content of GLONASS ephemeris and its transmitted message
设计了如图1所示的GLONASS星历解算基本算法。在该算法中,当获取到第4串电文时,判断星历数据是否积累完成。其常用方法为设置电文串接收标识数组bRecv[15],当接收到对应电文串s时,电文串标识bRecv[s]设置为TRUE,当第1到第4串的标识均为TRUE时,星历积累完成,当获取到第4串电文后,不管星历是否积累完成,电文串标识bRecv[1]~bRecv[4]均置为FALSE。该方法被称为电文串标识法。
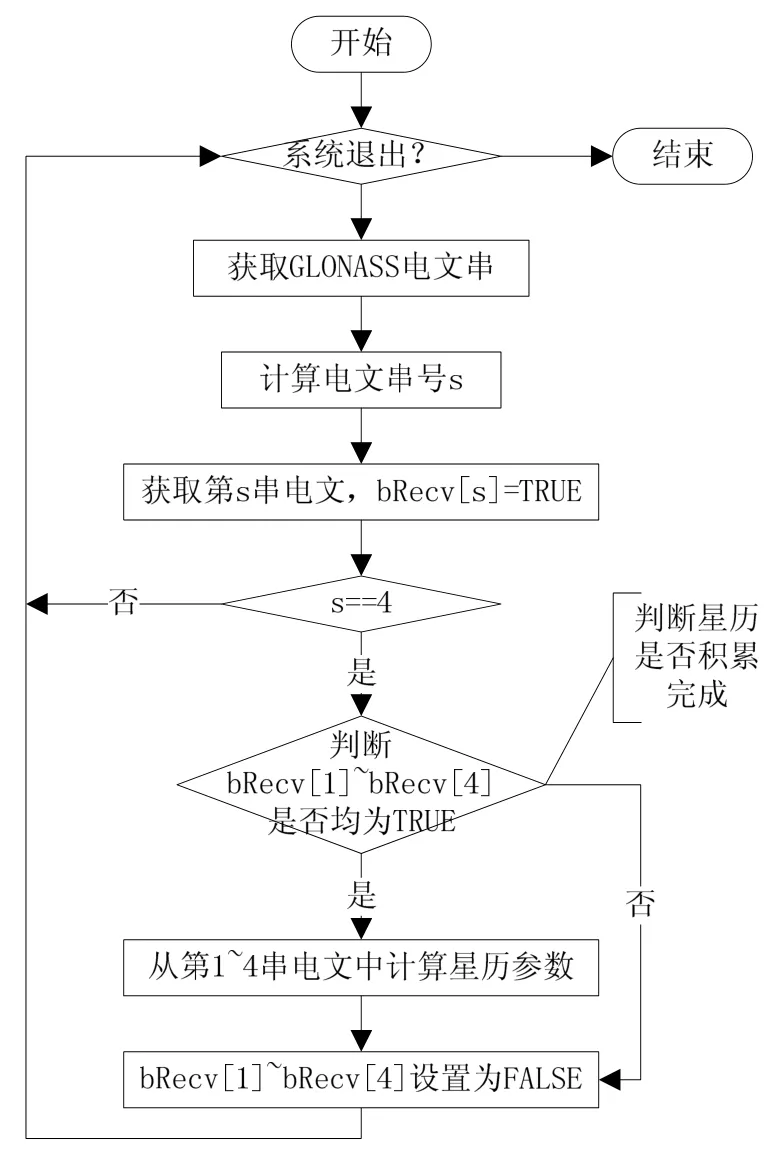
图1 GLONASS星历解算基本算法Fig.1 Basic algorithm of calculating GLONASS ehpemeris
2 GLONASS星历更新时的电文特征
图1算法在数据正常情况下能够获取正确星历,但当电文串丢失时无法保证第1~4串电文为连续的电文。图2示意该算法积累到的第1串电文为-28.231 s时的数据,第2/3/4串电文为67.771 s附近的数据。在此过程中,星历数据发生更新,将获取到错误星历,如表2中黑体部分所示,其中X分量为更新前的星历,Y和Z为更新后的星历。星历错误引起的箭载GLONASS定位结果异常数据如表3所示,位置偏差达到400 km以上,速度偏差达到400 m/s以上。
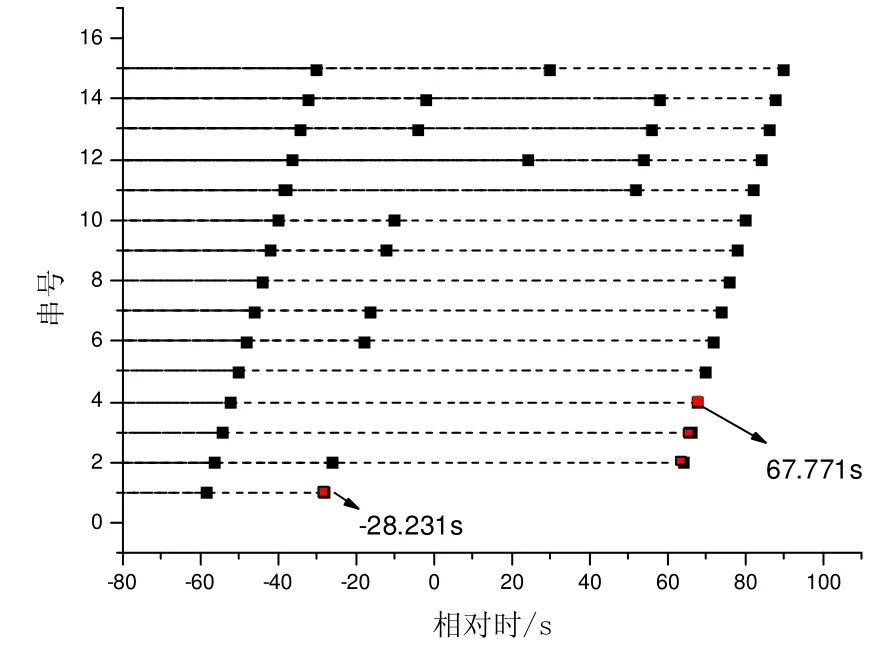
图2 电文串丢失后,积累不到连续的1~4串电文Fig.2 Continuous strings 1~4 can’t be accumulated when strings lose
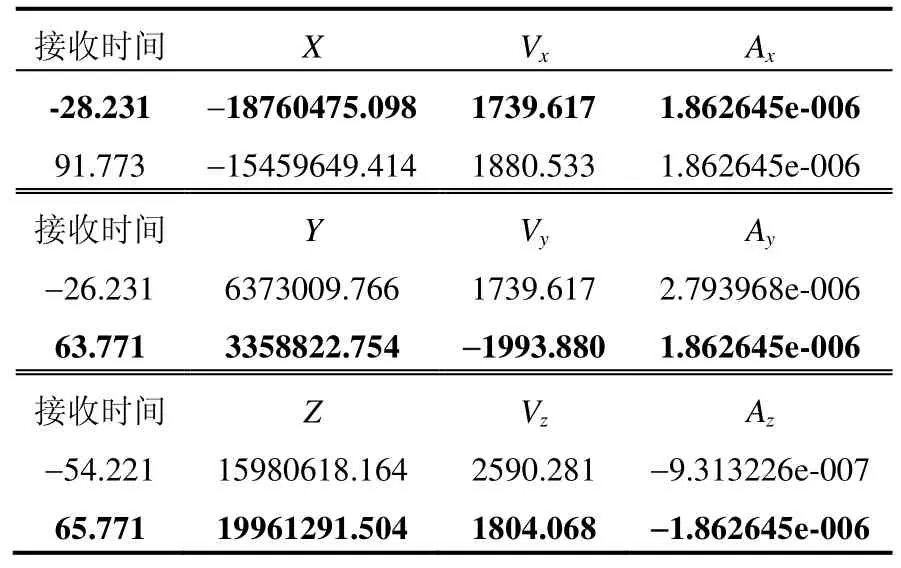
表2 电文串丢失且星历更新时获取到错误星历数据Tab.2 Fault ephemeris when there are losestrings and ephemeris is updating
表3 错误星历数据导致的定位结果偏差Tab.3 GLONASS positioning results by fault ephemeris
针对此问题,考虑改进图1中的算法,采用时间比较法判断星历是否积累完成,即把电文串接收时间记录在dTime[15]数组中,第s串电文串的接收时间记录在dTime[s]中。如果第1~4串电文接收时间最大值与最小值之差小于7 s(电文串下传周期为2 s),认为积累到的电文串连续,如图3所示。当图2中的电文到来时,获取的dTime[1]为-28.231 s,dTime[4]为67.771 s,两者差值为96.002 s,大于7 s,因此该错误星历被剔除。
图3 GLONASS星历解算改进算法Fig.3 Advanced algorithm of calculating GLONASS ephemeris
表4 星历更新时从连续1~4串中获取到错误星历数据Tab.4 Fault ephemeris from continue strings 1~4 when updating
在不发生误码的前提下,是否从连续的1~4串中获取的星历数据,一定是一组正确的星历?表4示意了这种情况,在12661.7246 s前的连续3串电文中,X分量和Y分量已经更新,而Z分量没有更新。由此可知,GLONASS星历参数更新时,并不保证从第1串电文开始更新。为解决星历更新时的数据混乱问题,一种简单的处理方式是,避开星历更新那一时刻引入的混乱数据,即考虑第1串中的即时数据更新标志(P1),当P1值为1时,表明星历参数在更新,所有1~4串电文均被剔除,这种算法同时也剔除了当时正确的星历,P1出现周期为30 min。
3 GLONASS星历误码时的电文特征
GLONASS电文校验算法无法校验出多个(2个以上)偶数位比特的差错[3,10],表5示意了电文误码导致的星历异常数据,如表中黑体部分所示,异常数据分别出现在16773.83 s以及19233.745 s,前者Y、Vy、Ay发生错误,后者Z、Az发生错误。
仅统计GLONASS星历时间及其位置、速度及加速度量,共需占用电文175位,如表1所示。电文误码发生时,先后两组星历,其电文误码发生位置完全相同的可能性几乎没有;与此同时,当电文误码发生时,其轨道特性可能与其标称轨道不一致。据此,有两种方法可以检测电文误码导致的数据异常:原码比对检测法和轨道特性检测法。
1)原码比对检测法,即比较最近两组健康星历的原码值,如果数据一致则认为获取到正确的星历。如表5中黑体部分标识的异常星历数据各自分别出现1次,因此通过该方法可排除表中的异常数据。
2)轨道特性检验法,即通过解算出的星历数据确定出卫星的轨道,判断确定的轨道特性与标称轨道是否一致。GLONASS轨道特性有:轨道标称高度为19100 km,轨道偏心率标称值为0,轨道倾角标称值64.8°,星历时间在当前时15 min内等等。表5中的异常星历数据均可通过该方法检测。
表5 电文误码导致星历数据异常Tab.5 Fault ephemeris when with bit-errors
4 一种可靠的GLONASS星历参数解算算法
当卫星健康标识Bn指示不健康时,原码比对检测法失效,原因是卫星一直下传数值相同的星历原码,如表6所示。卫星健康标识Bn位于第2串,共占用3位,其最高位“1”表示给定卫星不健康,表中X、Y、Z各分量均列了4组,前3组为卫星不健康时的数据,最后1组为正常数据。当采用原码比对检测法时,将获取到一组错误的星历数据,因此,星历参数解算应当在卫星健康标识Bn最高位为0时进行。该方法称为星历健康判断法。
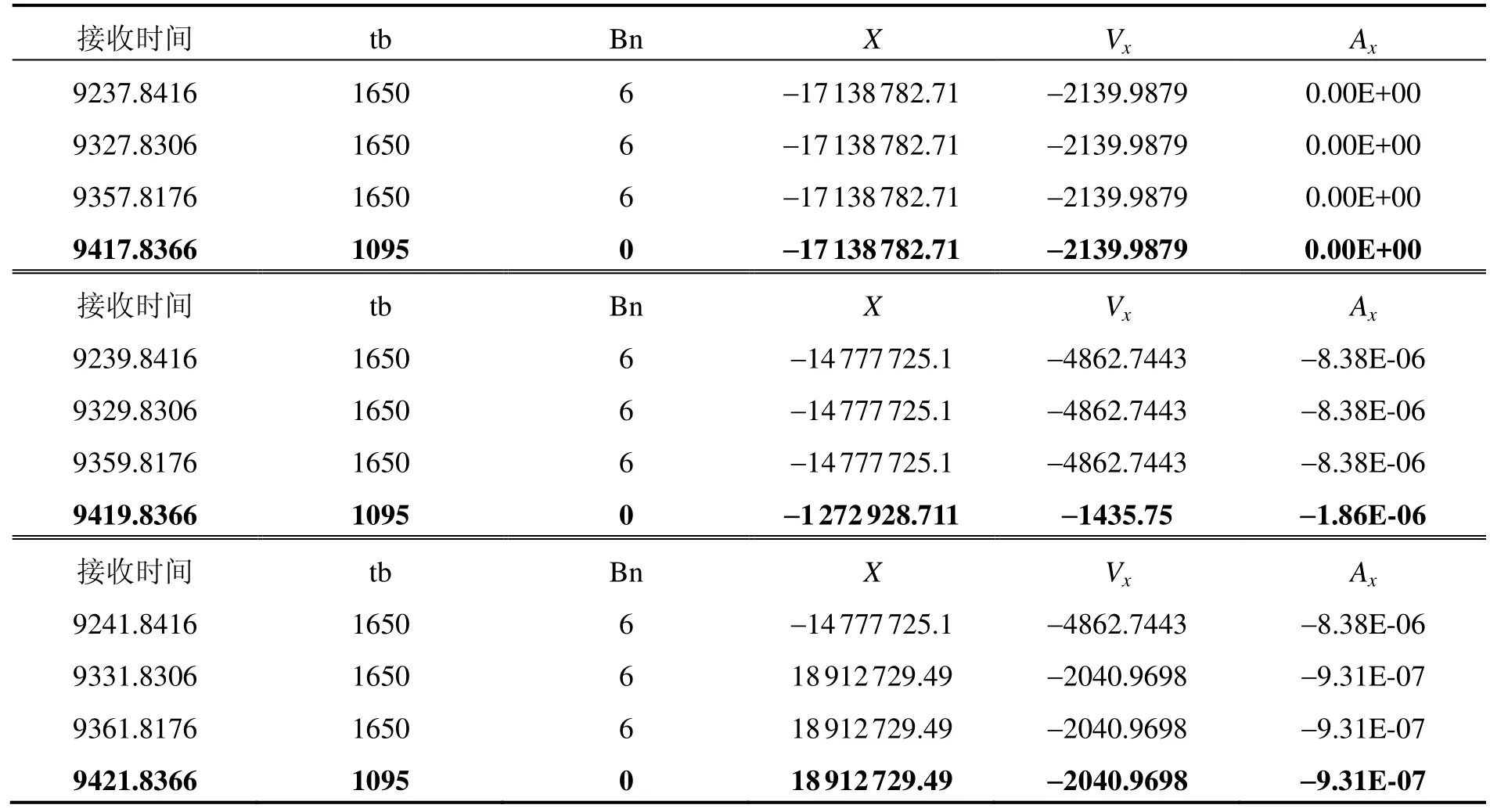
表6 卫星不健康时的星历数据Tab.6 Fault ephemeris when satellite malfunction
综合以上论述,考虑星历更新、卫星不健康、电文误码等数据异常情况,设计了如图4所示的星历解算算法。算法为每颗卫星准备了一个星历数组缓冲区,该数组的每个元素由星历数据和星历个数组成,图中示意了单颗卫星星历解算的流程。
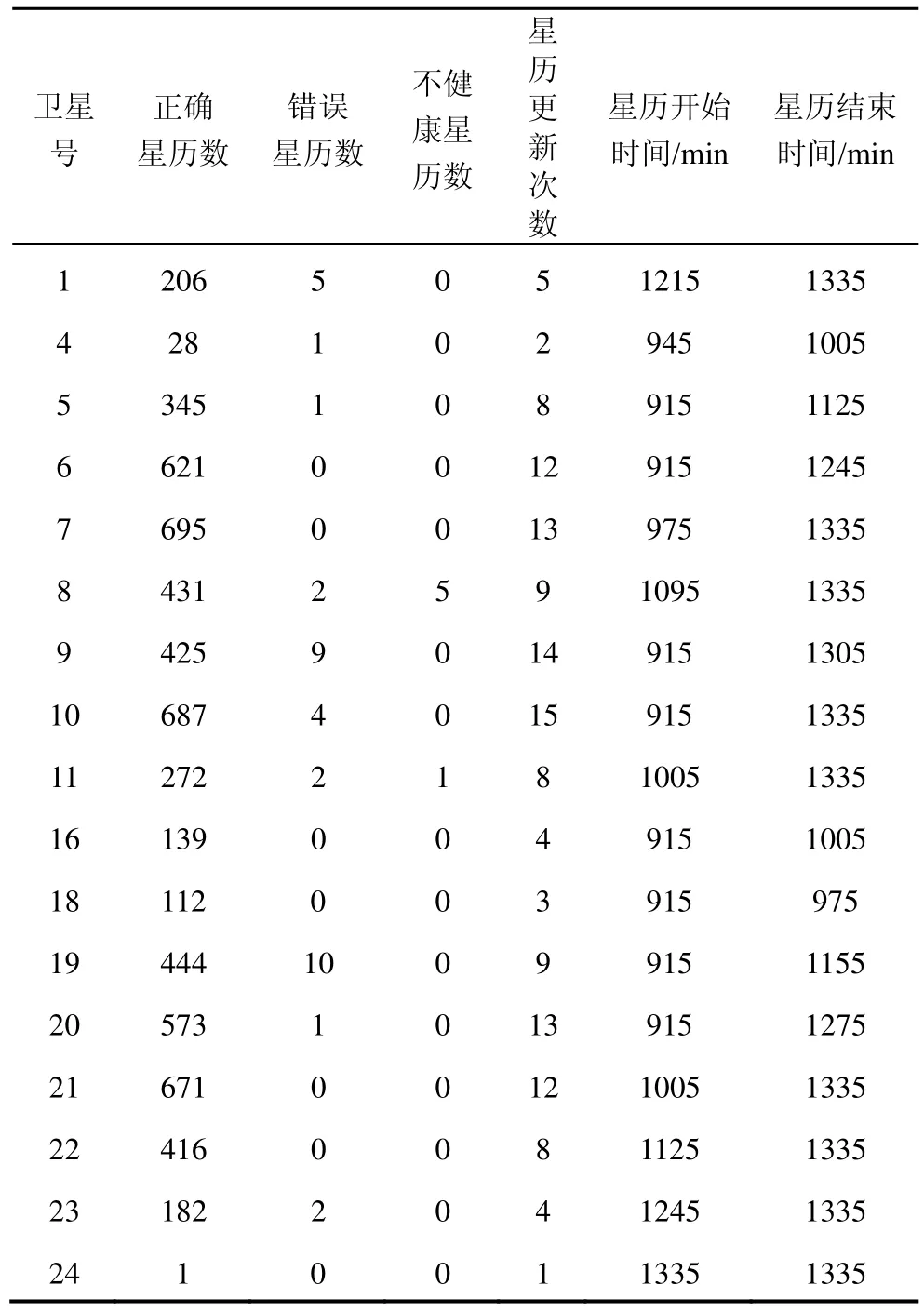
表7 可靠的星历解算算法获取的星历数据Tab.7 Ephemeris by trusty algorithm
1)开始时,星历数组为空,当第1串到第4串电文接收标志为TRUE时,星历积累完毕,如图4中①所示;判断健康标志,防止非将康数据进入,如图4中②所示;获取星历原码,在星历数组中搜索是否存在与该原码一致的数据,如图4中③所示。比较时,对于X等浮点数,允许其有1个分层值的差异;对于tb等整数,严格采用等号进行比较。
2)当发现数组中不存在数据相同的星历时,把星历数据转换为轨道参数,采用轨道特性检测法判断星历数据是否合法,如图4中④所示。如果数据合法,那么把该星历数据加入数组中;如果数据不合法,那么该组星历数据被剔除。
3)当发现数组中已存在数据相同的星历时,对应的星历计数加1,同时把该星历做为系统可使用的星历,如图4中⑤所示,这种安排可保证系统使用的星历为最新获取的星历。在更严格的判断中,也容易改造为至少获取了三组以上(含)数据一致的星历作为系统使用的星历。
上述算法至少要求获取2组数据一致的星历,即可能需等待60 s。在某些要求快速定位的场合,只要获取到一组合法的星历即可作为系统使用的星历,通过修改图4中⑥即可实现,可缩短首次定位时间30 s。表7列出了采用该算法获取的某弧段内星历数据,正确星历总数为6248个,错误星历总数为37个,不健康星历总数为6个,所有卫星星历更新时均正确识别。采用上述算法可排除错误星历、不健康星历以及星历更新时异常星历。
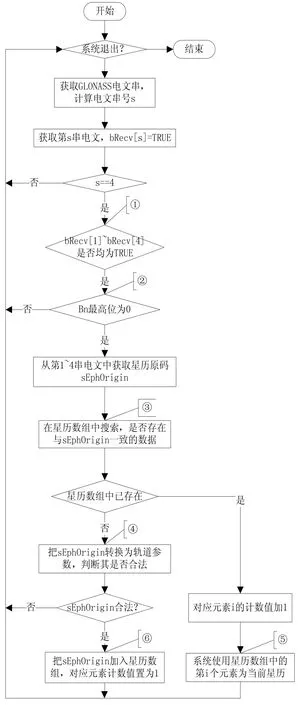
图4 一种可靠的星历解算算法Fig.4 Trusty algorithm of calculating GLONASS ephemeris
星历下传周期为30 s,更新周期为30 min,极端情况下,星历数组每小时将积累120组数据,具体实现时应注意时间过长导致星历数组过大问题。
5 结 论
GLONASS星历电文具有如下特征:
① GLONASS星历通过第1~4串电文下传,星历下传周期为30 s,更新周期为30 min,在一个更新周期内共下传60组数据完全相同的星历。
② GLONASS电文串在解调过程中可能丢失,一个更新周期内,任意第1~4串电文均可组成一组完整的星历。
③ GLONASS星历更新时,不保证从第1串开始,也不保证在一个连续的第1~4串电文中更新完毕。
④ GLONASS接口控制文件提供的电文校验算法,无法校验所有误码,但一个更新周期内两组星历电文误码发生位置完全相同的概率几乎为零。
⑤ GLONASS星历电文误码发生时,解算出的星历参数转换为轨道参数,其轨道特征在很大概率上与其标称轨道不一致。
⑥ GLONASS星历不健康时,可能下传多组数值完全相同的错误星历数据,因此星历参数解算时,需剔除不健康星历。
针对GLONASS星历电文特征,本文提出了一种可靠的GLONASS星历解算算法,算法特征有:
1)星历电文积累时采用电文串标识法。该方法针对电文特征①和②设计,能够适应电文丢失,可尽量积累有效的电文串,充分利用已有的数据,该方法优于时间比较法。
2)星历合法性检测时采用了星历不健康判断法、轨道特性检测法和原码比对检测法。这些方法针对电文特征③、④、⑤和⑥设计,能够适用卫星不健康、电文误码、星历更新异常等情况,确保获取正确星历。
3)算法采用星历数组积累历史星历数据,星历解算与星历更新同步完成,在此基础上容易实现更为严格的星历更新策略。
试验结果表明,该算法星历误码识别率100%,星历更新异常识别率100%,获取星历数据正确性100%。该算法不仅可用于GLONASS星历解算,经过改造后,也可用于GPS、BDS星历解算。
(References):
[1] 陈金平, 王梦丽, 钱曙光. 现代化GNSS导航电文设计分析[J]. 电子与信息学报, 2011, 33(1): 211-216. Chen Jin-ping, Wang Meng-li, Qian Shu-guang. Analysis of modernization GNSS navigation message’s designing[J]. Journal Electronics & Information Technology, 2011, 33(1): 211-216.
[2] Global positioning system directorate systems engineering & integration: interface specification IS-GPS-200. [EB/OL]. (2011-09-21)[2014-08-16]. http://www.gps. gov/technical /icwg/IS-GPS-200.pdf.
[3] GLONASS interface control document[S]. Navigational Radio Signal in bands L1, L2 (Edition 5.1). Russian Institute of Space Device Engineering, Moscow, 2008.
[4] Alexander P. New structure for GLONASS NAV message [J]. GPS World, 2013, 24(11): 36-39.
[5] Gianni D, Fuchs J, De Simone P, et al. A modeling language to support the interoperability of global navigation satellite systems[J]. GPS Solutions, 2013, 17(2): 175-198.
[6] Harima K, Saito H, Ebinuma T. Navigation message demodulation for GPS receiver on-board spinning rockets [J]. GPS Solutions, 2012, 16(4): 495-505.
[7] 段荣, 赵修斌, 庞春雷, 等. GPS快速定位中相位模糊度动态解算的一种正则化方法[J]. 中国惯性技术学报, 2015, 23(5): 624-629. Duan Rong, Zhao Xiu-bin, Pang Chun-lei, et al. Regularization approach for dynamic resolution of phase integer ambiguity in GPS rapid positioning[J]. Journal of Chinese Inertial Technology, 2015, 23(5): 624-629.
[8] 李寅寅, 徐晓苏, 刘锡祥, 等.基于半比特交替和FFT组合的GPS软件接收机洛信号捕获算法[J]. 中国惯性技术学报, 2012, 20(1): 46-50. Li Yin-yin, Xu Xiao-su, Liu Xi-xiang, et al. Acquisition algorithm based on half-bit alternation and FFT combination for weak signals of GPS software receiver[J]. Journal of Chinese Inertial Technology, 2012, 20(1): 46-50.
[9] 刘毓, 邹星. 弱GPS/GLONASS信号捕获算法研究[J].测绘科学, 2013, 38(1): 133-135. Liu Yu, Zou Xing. Acquisition algorithm of weak GPS/GLONASS signals[J]. Science of Surveying and Mapping, 2013, 38(1): 133-135.
[10] Hu Jian , Rao Aishui, Zhang Long , et al. A GLONASS navigation data verification algorithm under high biterror rates[C]//Proceedings of China Satellite Navigation Conference, 2015, Vol. I: 553-562.
Characteristics and calculation method of GLONASS ephemeris’s message
RAO Ai-shui, LIU Bing, LI Qing-mei, ZHANG Long
(Satellite Maritime Tracking and Control Department of China, Jiangyin 214431, China)
To solve the problem of abnormal GLONASS positioning results due to falsely calculating ephemeris in flight task, the basic characteristics of GLONASS ephemeris’s message is described, which is transmitted from string 1~4 each frame, and sixty groups of ephemeris with the same data are transmitted within a update cycle. Then a basic algorithm is proposed to calculate GLONASS ephemeris basing on marked strings. It is found that the calculation will get fault ephemeris when there are lose strings during ephemeris is updating. In order to ensure ephemeris message is from one continue strings 1~4, an advanced algorithm is proposed based on received time comparing. But it is found that GLONASS ephemeris updates neither guarantee starting at string 1 nor end within one continue strings 1~4, so the advanced algorithm do not ensures getting right ephemeris. So the characteristics of message bit-error with ephemeris are analyzed, and a trusty algorithm is proposed to calculate GLONASS ephemeris based on ephemeris validity detection. In the trusty algorithm, the exceptional situations are all considered when ephemeris is malfunctioning, updating or the message has bit-errors. The validity of ephemeris is validated by the method of orbit property checking and the comparison of message bits. The valid message is full utilized by the marked strings. The trial results with the algorithm show that its recognition rate of bit-errors with ephemeris is 100%, its recognition rate of exceptional updated ephemeris is 100%, its correction rate of ephemeris is 100%.
message bit-error; ephemeris validity; satellite malfunciton; updated ephemeris; orbit property
V19
:A
2016-02-01;
:2016-05-26
饶爱水(1980—),男,工程师,从事航天测控研究。E-mail: lqmei03@163.com
1005-6734(2016)03-0355-06
10.13695/j.cnki.12-1222/o3.2016.03.014
