基于相关性函数的多传感器自适应加权融合算法
2016-04-09钱建中
丁 辉,仲 跃,张 俊,钱建中
(1.安徽工业大学 机械学院,安徽 马鞍山 243032; 2.盐城市水利局,江苏 盐城 224005;
3.盐城市盐都区水务局,江苏 盐城 224005)
基于相关性函数的多传感器自适应加权融合算法
丁辉1,仲跃2,张俊3,钱建中2
(1.安徽工业大学 机械学院,安徽 马鞍山243032; 2.盐城市水利局,江苏 盐城224005;
3.盐城市盐都区水务局,江苏 盐城224005)
摘要:针对多传感器实际测量中个别传感器出现的数据偏离现象,提出基于相关性函数的自适应加权融合算法。利用相关性函数对数据进行预处理,计算各传感器间的相互支持程度,对于偏离较为明显的数据,用相关性大的数据进行替换;再通过多传感器自适应加权融合算法对数据进行融合。利用该算法对相关数据进行处理,经计算分析得到融合结果为0.999 7,并与传统自适应加权融合算法以及极大似然法的计算结果进行对比。分析结果表明:算法的融合结果更接近实际,融合精度较高。
关键词:多传感器;自适应加权融合;相关性函数
多传感器数据融合是将来自多个传感器的数据或信息采用某种方式进行综合处理的过程。与单传感器测量数据相比,融合后的数据更接近被测参数的理论值,效果更佳。随着传感器技术等相关技术的发展,多传感器数据融合技术在军事领域和民用领域均得到了广泛应用[1-4]。
目前,模糊推理法[5]、神经网络法[6]、加权平均法等是应用较为普遍的数据融合方法。例如:党宏社等[7]将输入数据和输出数据模糊化,通过三角形隶属函数在相应区间内不断改变输出变量位置的方法,计算出输入和输出兼容度最大的位置,得到最终融合结果;仲崇权等[8]提出了基于最小二乘的加权融合算法,应用最小二乘原理推导出最优加权因子,利用加权算法求得融合结果;翟翌立等[9]从总均方误差最小这一思想出发,提出了多传感器自适应加权融合算法。以上方法均获得了较理想的融合结果,但未考虑传感器数据采集过程中可能出现偏差的情况。为避免当采集数据出现偏差时降低融合精度的情况发生,需对采集数据进行预处理。对此,本文将模糊数学中的相关性函数和多传感器自适应加权融合算法相结合,以期在传感器测量数据出现偏离的情况下,通过对数据进行预处理获得比较理想的融合结果,提高融合精度。
1相关性函数

(1)
(2)
式中:dij为第i个传感器与第j个传感器所测数据的置信距离测度。
假设利用n个传感器测量某一待测参数,则其置信距离测度dij(i,j=1,2,…,n)构成了这n个传感器的置信距离矩阵Dn。
(3)
给出融合上限θij,对于dij,令关系系数
(4)
如果rij=0或rji=0,则第i个传感器和第j个传感器相互不支持。如果rij=1,则说明第i个传感器支持第j个传感器。如果rij=rji=1,则第i个传感器与第j个传感器相互支持。
在多传感器监测系统中,当1组传感器均支持该传感器,则该传感器的测量数据有效;当仅有极少数或没有传感器支持该传感器,则该传感器的测量数据无效。在进行融合计算时,无效数据可以被同组支持程度最高的传感器的观测数据代替。融合上限θij的选取存在主观性和经验化,对此,可采用如下方法:
由dij的推算过程和统计意义易知0≤dij≤1,且dij越小,第i个传感器支持第j个传感器的程度越高。根据模糊理论中相关性函数的定义[11],可令

(5)
sij表示传感器i支持传感器j的程度。相关性函数gij为
(6)
所有gij构成相关性矩阵Gn。为计算各传感器被同组传感器支持程度的大小,定义该传感器被同组传感器支持的最低程度作为该传感器被同组传感器的支持程度,则令
(7)

2多传感器自适应加权融合算法

(8)
(9)

(10)
由式(10)可知,总均方误差为各加权因子的多元二次函数。利用多元函数求解条件极值的方法,可计算出在总均方误差最小的条件下其最优加权因子为[9]
(11)
采用最优加权因子,计算的最小均方差为
(12)
3计算分析
3.1算法步骤
数据处理的估计算法运算步骤如下:
1) 运用式(1)~(3)计算出测量数据的置信距离矩阵Dn;
3) 比较相关性矩阵各值的大小,对于偏离较为明显的数据用相关性大的数据替换;
3.2计算结果与分析
采用文献[10]中的数据,即用10个同类传感器测量某性能参数(如表1)。为进行对比,利用传统多传感器自适应加权算法[9]对以上数据进行融合,求得各传感器的最优加权因子(如表2)。
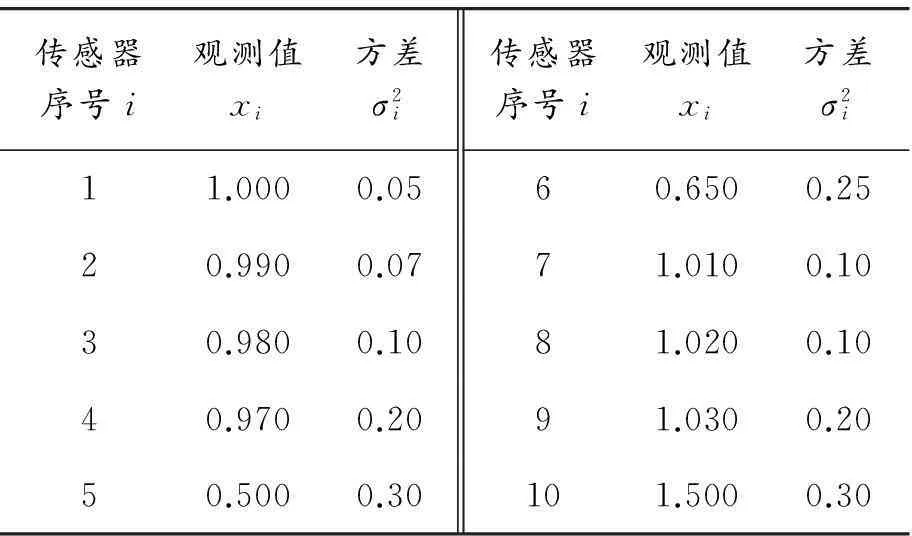
表1 某性能参数计算数据
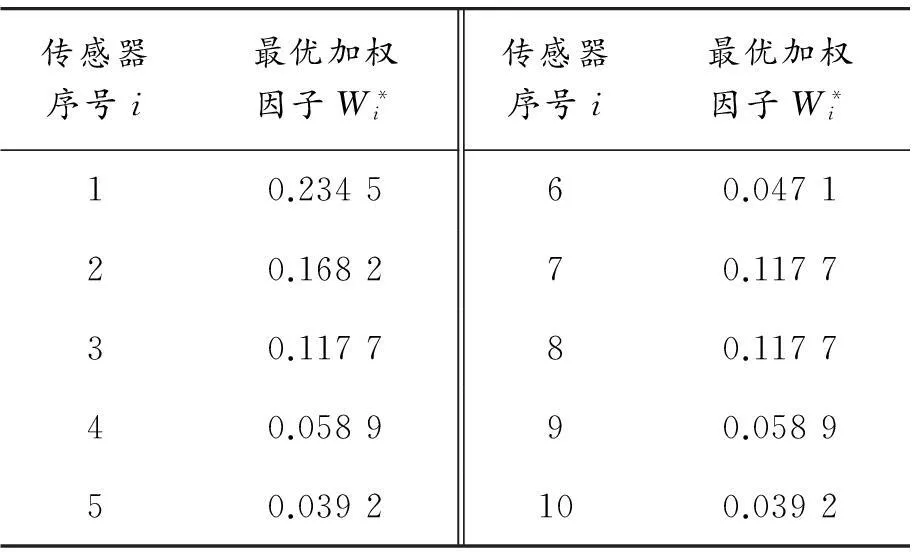
表2 原始数据的最优加权因子
利用文献[9]中多传感器自适应加权融合算法的计算结果为

0.98×0.117 7+0.97×0.058 9+
0.50×0.039 2+0.65×0.041 7+
1.01×0.117 7+1.02×0.117 7+
1.03×0.058 9+1.50×0.039 2=0.983 0
利用本文算法进行分析,由步骤1)可得到各传感器的置信距离矩阵D10:

由以上计算值可知:第1个传感器被其他传感器支持的程度最高,第5、6个和第10个传感器被其他传感器支持的程度较低,因此用第1个传感器的观测数据代替这3个传感器的观测数据。根据以上分析,表1的计算数据变更为表3。根据表3,由步骤4)计算可得各传感器的最优加权因子,见表4。
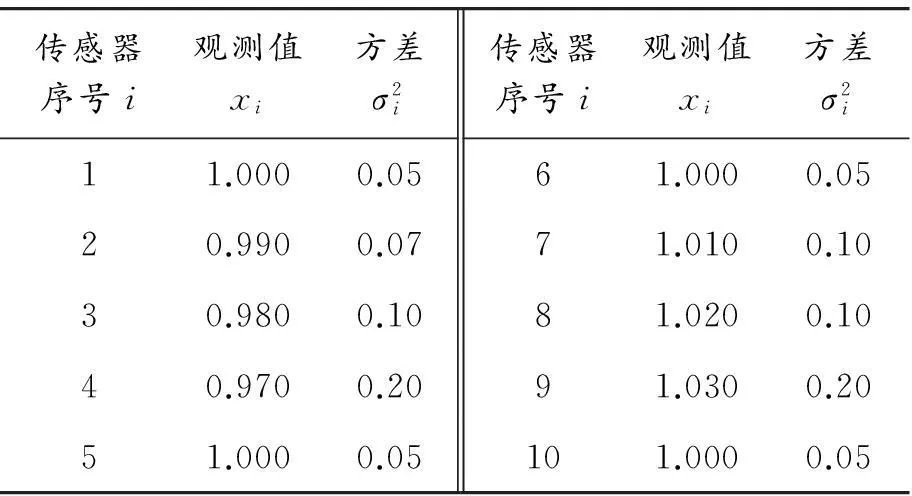
表3 数据预处理后的计算数据
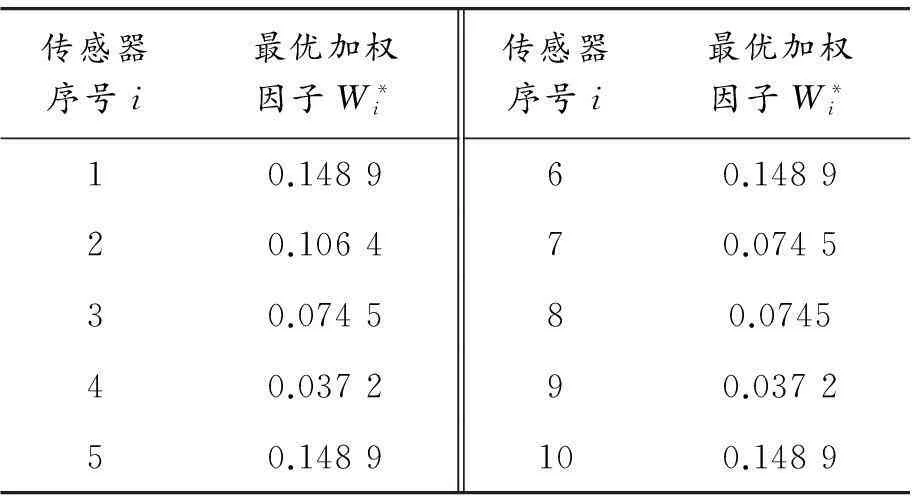
表4 数据预处理后的最优加权因子
根据表3,4,由步骤5)计算可得
0.98×0.074 5+0.97×0.037 2+
1.00×0.148 9+1.00×0.148 9+
1.01×0.074 5+1.02×0.074 5+
1.03×0.037 2+1.00×0.148 9=0.999 7
由计算结果可以看出:仅利用自适应加权融合算法的融合结果为0.983 0,运用极大似然方法获得的融合结果为0.999 26[10],而本文方法的融合结果为0.999 7,表明提出的算法融合精度更高。
4结束语
在利用多个传感器对某一参数进行测量时,针对个别测量数据可能出现偏离的情况,提出基于相关性函数的自适应加权融合算法。利用相关性函数对数据进行预处理,再利用自适应融合算法得到融合结果,并与传统多传感器自适应加权融合算法及极大似然方法的融合结果进行对比。结果表明:本文算法的融合结果更接近实际,融合精度更高。
参考文献:
[1]王耀南,李树涛.多传感器信息融合及其应用综述[J].控制与决策,2001,16(5):518-522.
[2]付华,杜晓坤.基于Bayses估计理论的数据融合方法[J].自动化技术与应用,2005,24(4):10-12.
[3]陈咨余,张新伟,叶凌云.基于LMS算法的多传感器数据加权融合算法[J].计算机工程与应用,2014,50(20):86-90.
[4]王军,苏剑波,席裕庚.多传感器融合综述[J].数据采集与处理,2004,19(1):72-77.
[5]李雄,王凯,徐宗昌.基于模糊贴近度的多传感器数据融合测量[J].计测技术,2005 25(4):6-8.
[6]王晓东,邬纳新,王超,等.连续加热炉运行状态神经网络融合分析[J].安徽工业大学学报(自然科学版),2002,19(4):270-272.
[7]党宏社,韩崇昭,王立琦,等.基于模糊推理原理的多传感器数据融合方法[J].仪器仪表学报,2004,25(4):527-530.
[8]仲崇权,张立勇,杨素英,等.基于最小二乘原理的多传感器加权融合算法[J].仪器仪表学报,2003,24(4):427-430.
[9]翟翌立,戴逸松.多传感器数据自适应加权融合估计算法的研究[J].计量学报,1998,19(1):1-7.
[10]万树平.基于最小一乘估计的多传感器信息融合方法[J].计算机工程,2010,36(2):257-259.
[11]MAMLOOK R.Fuzzy set methodology for evaluating alternatives to compare between different power production systems[J].Journal of Applied Science,2006,6(9):2117-2125.
(责任编辑杨黎丽)
Multi-Sensor Adaptive Weighted Fusion Algorithm Based on Correlation Function
DING Hui1, ZHONG Yue2, ZHANG Jun3, QIAN Jian-zhong2
(1.School of Mechanical Engineering, Anhui University of Technology, Maanshan 243032, China;2.Yancheng Water Conservancy Bureau, Yancheng 224005, China;3.Yandou Water Conservancy Bureau, Yancheng 224005, China)
Abstract:Aiming at the phenomenon that a sensor may get biased data in the process of multi-sensor measurement, the multi-sensor adaptive weighted fusion algorithm based on correlation function was put forward. The data was preprocessed by correlation function, and then the mutual supportability of each sensor was calculated. In terms of the obvious biased data, they were replaced by high correlation data. Finally, the data was fused by using multi-sensor adaptive weighted fusion algorithm. The related data was processed by using the algorithm. The fusion result, which is 0.999 7, was obtained via calculation and analysis. Moreover, it was compared with traditional adaptive weighted fusion algorithm and maximum likelihood method. The result shows that the fusion result based on the algorithm is close to the real situation and has a higher precision.
Key words:multi-sensor; adaptive weighted fusion; correlation function
文章编号:1674-8425(2016)02-0114-05
中图分类号:TP274
文献标识码:A
doi:10.3969/j.issn.1674-8425(z).2016.02.020
作者简介:丁辉(1988—),男,安徽阜阳人,硕士研究生,主要从事现代设计方法、多传感器数据融合研究。
基金项目:江苏省水利科技项目(2014078)
收稿日期:2015-04-09
引用格式:丁辉,仲跃,张俊,等.基于相关性函数的多传感器自适应加权融合算法[J].重庆理工大学学报(自然科学版),2016(2):114-118.
Citation format:DING Hui, ZHONG Yue, ZHANG Jun, et al.Multi-Sensor Adaptive Weighted Fusion Algorithm Based on Correlation Function[J].Journal of Chongqing University of Technology(Natural Science),2016(2):114-118.
