SVPWM中的开路零矢量及其对磁链轨迹的影响研究
2016-04-06孟彦京周鹏马汇海陈君王素娥陕西科技大学电气与信息工程学院陕西西安710021
孟彦京,周鹏,马汇海,陈君,王素娥(陕西科技大学电气与信息工程学院,陕西西安710021)
SVPWM中的开路零矢量及其对磁链轨迹的影响研究
孟彦京,周鹏,马汇海,陈君,王素娥
(陕西科技大学电气与信息工程学院,陕西西安710021)
摘要:提出了一种开路零电压矢量,以改善SVPWM(空间电压矢量脉宽调制)中传统短路零电压矢量引起的磁链幅值衰减快和电磁转矩波动大的缺点。在传统的8种开关模式的基础上拓展了4种新的有效开关模式,从而产生开路零电压矢量。经研究发现,传统的短路零电压矢量作用于电机时,电机处于能耗制动状态,磁链幅值衰减快,电磁转矩为负值;而开路零电压矢量作用时,电机处于自由停车状态,磁链幅值衰减速率较短路零电压矢量作用时慢大约1倍,电磁转矩为零,且与非零电压矢量切换时,电磁转矩波动小,转速也将更加平稳;并用PLECS软件对两种零矢量仿真,验证了分析结果。
关键词:空间矢量脉宽调制;零电压矢量;磁链轨迹;开关模式
目前,SVPWM和正弦脉宽调制(SPWM)是两种最常用的脉宽调制方式。SVPWM是把三相变流器的指令输出电压在复平面上合成为电压空间矢量,并通过不同的开关组合方式去逼近指令电压空间矢量,直接以得到圆形旋转磁场为目标,与传统的SPWM相比,其开关器件的开关次数可以减少1/3,直流电压的利用率可提高15.47%,并能获得较好的谐波抑制效果,且易于实现数字化,控制目标直接等优点,而得到了广泛应用[1-4]。
为了在恒定直流电压供电,并且保持定子磁链幅值恒定的情况下,能控制磁场的旋转速度,则需要加入零电压矢量[5]。针对零电压矢量目前已有许多文献对其做了分析研究,文献[6]指出在异步电机的控制中零矢量只能增加转差而不能增加磁链幅值,并进一步分析了永磁同步电机中的零矢量的作用及用法。文献[7]提出在随机化2个脉冲周期的同时,随机化零矢量,从而利于设计滤波器和控制器,且能改善频谱特性。文献[8]有别于传统的零矢量,基于Z源变流器提出了直通零矢量,但依然属于短路零矢量,且电路结构不同于普通逆变器。还有类似关于零矢量研究的文章,但也都是基于传统的零电压矢量即本文中所提的短路零电压矢量进行研究的。并且,迄今为止几乎所有的文献在分析加入零矢量时,均认为此过程中电机定子磁链的幅值是“近似不变”的。也还未发现有文献论述有关磁链幅值近似不变的具体条件,及零矢量作用时磁链衰减情况的问题。
由于实际中电机定子、转子电阻的存在,在零矢量作用过程中电机定子、转子电流均是衰减的,因此其总磁链幅值也是衰减的。而磁链幅值对电机的转矩控制有着至关重要作用[9-10]。为了提高SVPWM的性能,需要探索磁链幅值的衰减速率及电磁转矩变化。本文对零电压矢量做了深入分析和研究,发现在短路零电压矢量作用时,电机磁链幅值衰减速率快,认为其近似不变需要一定条件,且电磁转矩为负值。同时拓展出了4种新的开关模式,提出了开路零电压矢量,并以磁链幅值衰减、电磁转矩波动等方面与短路零电压矢量做了对比研究。
1 空间电压矢量(SVPWM)技术
异步电机由三相对称电源供电时,可以用合成空间矢量表示电机的定子电压方程:

式中:us为电机定子端电压;Rs为电机定子电阻;is为电机定子电流;Ψs为电机定子磁链。
当电机转速不是很低时,定子电阻压降相对于反电势很小,可以忽略不计,因此可得电机定子磁链与电压的关系为

当电动机采用电压型逆变器供电时,主电路如图1所示。
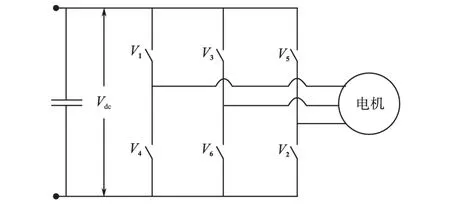
图1 逆变器原理图Fig.1 The principle diagram of inverter system
传统逆变器的6个开关管是按照180°导电工作方式,即同一桥臂上下功率管总是互补状态。每一个开关有1和0两种工作状态即通常的8个空间矢量,其中2个为零矢量。根据式(2),将6个非零电压矢量与作用时间的乘积作为1个磁链轨迹的边,就得到了由6个非零空间电压矢量u1~u6与时间Δt的乘积形成的磁链轨迹,即如图2所示的正六边形空间旋转磁场。
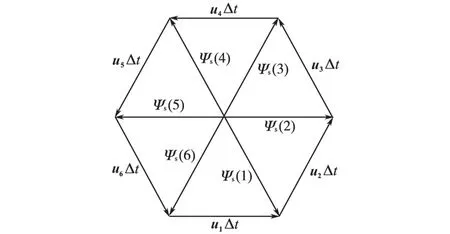
图2 正六边形空间旋转磁场Fig.2 Hexagon space rotating field
图2中,Δt=π/3ω1,定子磁链的幅值[5]为
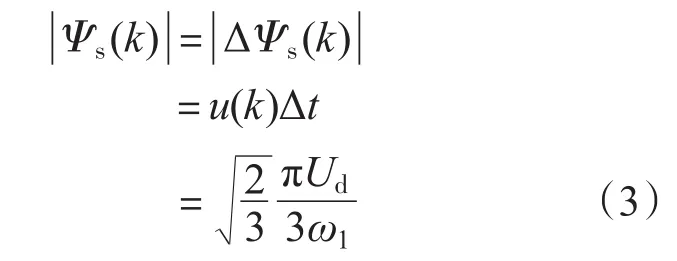
由式(3)可知要保证定子磁链幅值不变,必须使Ud/ω1为常数。当用电压型逆变器供电时Ud为直流侧电压,ω1是经过离散化后通过控制开关的时间来实现的。所以Ud/ω1为常数的控制目标只能无限近似,定子磁链幅值只能无限接近恒值。而根据开关表的设计,2个短路零矢量的插入就可以改变磁链运行的周期,实现变频。
由于磁链的衰减时间较零矢量的作用时间通常都相差较大,因此目前几乎所有文献均不考虑插入零矢量后电机磁链的衰减时间。一般认为当零电压矢量作用于电机时,电机定子磁链幅值保持不变,即磁链轨迹的控制是所谓走走停停的方式。但实际中当对电机施加零矢量时,电机的励磁电流和转子电流会衰减,尤其是在转速较低的时候,之前的假设已经不存在,近似的认为磁链幅值不变会带来较大误差。因此通过分析零矢量对电机定子磁场的影响,提出了开路零矢量的概念,为进一步提高磁链轨迹的控制精度提供新的依据。
通常所说的零电压矢量是指短路零矢量,即6个开关中的上桥臂或下桥臂3个开关处于全导通的绕组通电状态;实际中可以控制逆变器同一桥臂上下管均处于关断状态,从而开关状态较传统的开关状态多出4种有效状态,如表1所示。
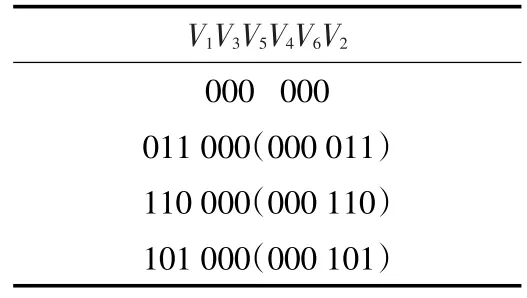
表1 有效开关状态Tab.1 Effective switch state
其中,当只有1只开关管导通时其对电机的作用效果与全关断相同,因此表中未将其列出;括号内的开关状态与其前面的作用效果相同。
本文提出的开路零电压矢量就是当6个开关均处于关断状态的一种绕组通电状态,如表1中第1行所示,此时逆变器6个开关已不再是互补状态。以下分别分析在短路和开路2种零电压矢量作用下电机磁链的变化规律。
2 定子短路时电机磁链衰减分析
本文分析及仿真所用的电机参数如下:定子电阻R1=0.4 Ω,转子电阻R2′=0.8 Ω,定转子漏感L1σ=L2′σ=2 mH,励磁电感Lm=70 mH。
当电机三相定子突然短路时,其动态等效电路如图3所示。此时电机工作于能耗制动状态,电机本身的定子、转子电流和由负载的动能转化而来的电能都会在电机定子转子电阻上以热能消耗。
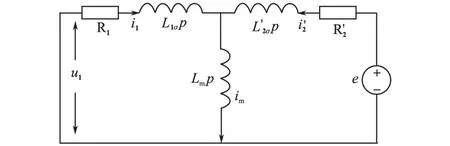
图3 异步电机动态等效电路Fig.3 Induction machine dynamic equivalent circuit
图3中,u1为定子相电压;i1为定子相电流;i2′为转子电流折算值;im为励磁电流;L1σ,L2′σ为一、二次侧绕组漏电感折算值;R1,R2为一、二次绕组电阻折算值;Lm为励磁电感。当忽略异步电机铁耗时,其电磁转矩可表示为

式中:Ω为机械角速度;Pm为电机的输出机械功率;Pi为输入电机的电功率。
当三相定子绕组短路后Pi=0,可得:

在电机静止之前,Ω均为正值且越来越小;因此从式(5)可以看出当电机定子短路后,其电磁转矩为负值,幅值会达到电机额定转矩的6倍以上[1],会使电机减速加快;而当电机再次被非零电压矢量作用时,电磁转矩又会是正值,促使电机加速,这也加剧了电机的电磁转矩和转速的波动。
在电机三相短路过程中可以用叠加原理进行分析,相当于在电机短路时,其定子端叠加了一个大小相等相位相反的电压。
设电机三相短路前相电压为

则电机三相短路后定子电流近似为[1,11]
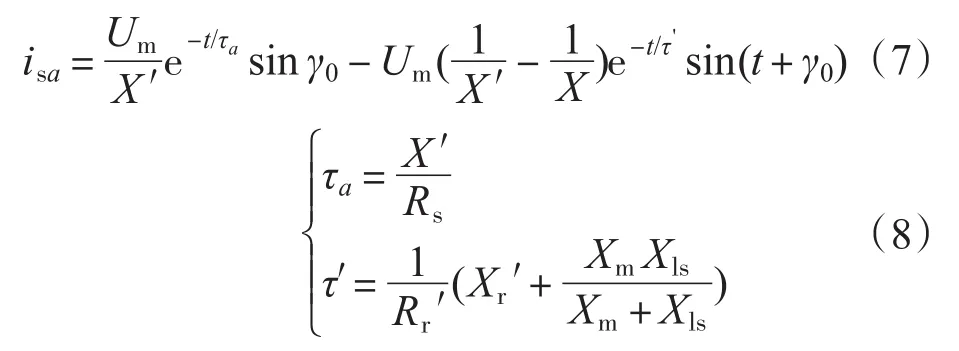
式中:X和X′分别为电机折算到定子侧的稳态和瞬态电抗值。
可以看出定子电流分为两部分,分别以τa和τ′为时间常数做指数衰减,最终趋于零。通过动态等效电路可以求得转子电流也是会随时间衰减,则最终电机磁链的幅值同样会随时间迅速衰减。
3 定子开路时电机磁链衰减分析
如上所述,当电机三相定子绕组与电源断开时,作用于电机定子的依然是零矢量。但此时与短路时不同的是,衰减过程只有转子绕组的磁场能量衰减,而与定子无关。此时电机相当于一个初始值为定子断开瞬间时所处磁场能量为初值的转子直流绕组的电流衰减过程。(此时励磁绕组的电流初始值就是等效的磁场初始值在转子回路的等效电流值),由于定子绕组开路,电机电磁转矩为零,电机处于自由停车状态,较短路零矢量其电磁转矩和转速更平稳;而机械能和电磁能各自由机械摩擦阻力和电磁衰减常数决定其衰减时间,电机的等效电路如图4所示。从等效电路可以看出,当电机定子侧断开时,只有转子电流流过励磁绕组,且转子电流会因电机转子铜耗等效电阻R2′的存在而衰减。
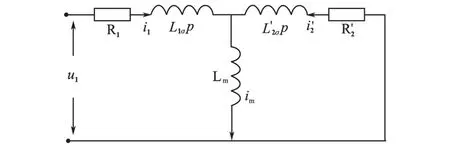
图4 异步电机等效电路Fig.4 Induction machine equivalent circuit
电机转子时间常数τr表示为
对转子回路列写基尔霍夫电压方程:

解得:

式中:I20为电感电流初值。
将本文中电机参数带入式(9)中可求得τr=0.09 s,理论上当t→∞时,I20衰减为0;但实际应用中一般认为t=3~5τr,即:0.27~0.4 s,就可以认为电流衰减为0。按以上分析可得,当t=0.27 s,即:t=3τr时,转子电流衰减为原来的4.98%。
根据同步旋转坐标系下电机磁链方程:
式中:Ψsd,Ψsq,Ψrd,Ψrq分别为电机定、转子d,q轴磁链;Lm为电机定转子互感;Ls为定子等效两相绕组自感,即:Lm+Lls;Lr为转子等效两相绕组自感,即:Lm+Llr;isd,isq,ird,irq分别为电机定、转子d,q轴电流。
因为电机三相定子绕组开路,有:

将式(13)带入式(12)可得定、转子磁链为
式中:Lm,Lr均为常量。
从式(14)中可以看出,电机d,q轴定、转子磁链均取决于转子电流,且成线性关系,因此也以τr为时间常数做指数衰减;根据上面分析转子电流衰减的结果可知:经过0.27 s即:t=3τr,定子、转子磁链均会随电机转子电流衰减为原来的4.98%。
4 仿真结果
本文采用PLECS电力电子仿真软件搭建系统,以验证上述分析中异步电机定子短路和开路时定子磁链的分析结果。
4.1电机定子短路时定子磁链仿真
异步电机带额定负载启动,到正常运行之后,在t=0.8 s时,将电机三相定子绕组短路,即用短路零矢量作用于电机。图5a是t=0.8~1.07 s电机定子磁链的仿真结果,可以看出当电机定子短路时,定子磁链衰减很快,在整个时间段内磁链幅值从t=0.8 s时的衰减为t=1.07 s时的0.022 229,为初值的2.258 0%。图5b是短路零矢量作用前后,电磁转矩的仿真结果,转矩由正的额定转矩突变为约10倍的负额定转矩。
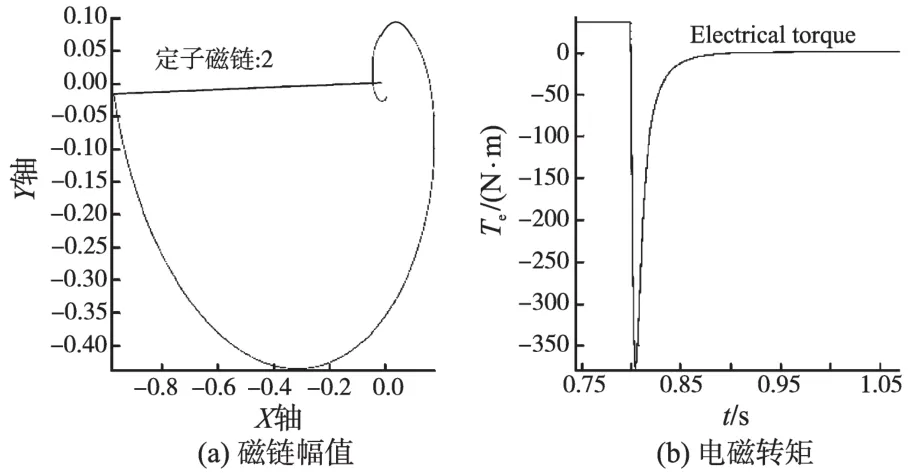
图5 短路零矢量Fig.5 The short-circuit zero vectors
4.2电机定子开路时定子磁链仿真
图6a为t=0.8~1.07 s电机定子侧与电源断开后,即受开路零矢量作用,电机定子磁链的衰减情况。在t=0.8 s时,当t=1.07 s时,衰减为原来的4.908 4%,与前面计算分析结果吻合。图6b为开路零矢量作用前后,电磁转矩的仿真结果,转矩由正的额定转矩突变为零。
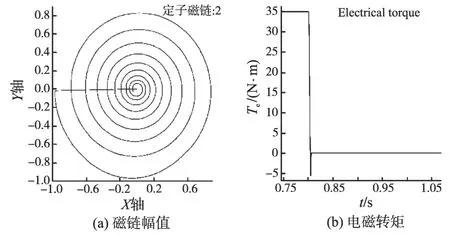
图6 开路零矢量Fig.6 The open-circuit zero vectors
4.3电机定子短路与开路磁链对比
将上述2个仿真数据导出,并绘制在同一坐标系中。如图7所示,星形线代表电机定子绕组开路时磁链曲线;三角形线代表短路时磁链曲线。
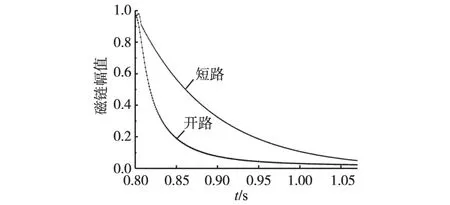
图7 磁链幅值衰减曲线Fig.7 The decay curves of flux amplitude
从图7中可以看出,在整个衰减过程中,电机短路时磁链幅值随时间的衰减速率都大于电机开路时磁链的衰减速率,尤其是在t=0.86 s之前,即电机短路或开路后0.06 s之前,短路时磁链衰减速率远大于电机开路时磁链的衰减速率。实际上SVPWM中零矢量作用时间并不长,基于空间电压矢量控制的软启动器也不会超过20 ms[12];经过20 ms,短路零矢量作用于电机时磁链幅值衰减为初值的47.543 7%;而在开路零矢量作用下为初值的81.133 4%,可见开路零矢量更适合于电机磁场控制,特别是零矢量作用时间较长的场合。
5 结论
通过以上的分析与仿真可以得到以下结论:
1)电机在零电压矢量的作用下,磁链幅值会随时间衰减,且衰减速率与电路状态有关,近似不变需要一定条件;
2)电机短路时磁链幅值衰减速率远大于开路时的衰减速率,同样经过0.27 s,开路零电压矢量作用下磁链幅值衰减为初值的4.908 4%;而短路零电压矢量作用时,衰减为初值的0.021 8%;
3)如果用电机定子绕组开路这种零电压矢量代替电机短路的零电压矢量,从定子磁链幅值的角度来看,更接近通常情况下SVPWM的分析,有助于提高矢量控制性能;
4)从电机的电磁转矩角度来看,当电机受到短路零矢量作用时,其电磁转矩为负值,而受到非零矢量作用时,电磁转矩为正值,即:电磁转矩总是在正负之间切换;而当电机受开路零矢量和非零矢量作用时,其电磁转矩为零或正值,相较受短路零矢量作用时其电磁转矩波动小,转速也将更平稳。
参考文献
[1]张海涛,赵争鸣,孟朔,等.三电平变频调速系统的三相短路制动仿真与实验分析[J].中国电机工程学报,2004,24 (8):56-60.
[2]周成,王群京,漆星,等.基于三相异步电机逆变器的SVP⁃WM仿真与实验研究[J].电气传动,2013,43(3):31-34.
[3]吴德会,柳振凉,夏晓昊,等.一种磁链轨迹跟踪的PWM方法及其特性分析[J].电机与控制学报,2013,17(6):107-116.
[4]汪江其,王群京,李国丽,等.基于SPWM/SVPWM调制策略的逆变器效率研究[J].电气传动,2013,43(1):39-43.
[5]阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2003.
[6]贾洪平,贺益康.永磁同步电机直接转矩控制中零矢量的作用研究[J].电气传动,2006,36(4):13-16.
[7]王庆义,邓歆,刘洋,等.一种零矢量-变延时随机PWM方法[J].电工技术学报,2009,24(12):132-136.
[8]盛况,曲延滨,蔡春伟.准Z源逆变器SVPWM最大恒定升压调制策略研究[J].电气传动,2012,41(12):33-36.
[9]胡斯登,赵争鸣,袁立强,等.基于磁链控制的异步电机V/F控制系统直流预励磁起动方法[J].电工技术学报,2012,27(7):118-123.
[10]Zhang Z,Tang R,Bai B,et al. Novel Direct Torque Control Based on Space Vector Modulation with Adaptive Stator Flux Observer for Induction Motors[J]. IEEE Transactions on Mag⁃netics,2010,46(8):3133-3136.
[11]汤蕴璆,张奕黄,范瑜.交流电机动态分析[M].北京:机械工业出版社,2005.
[12]孟彦京,张陈斌,陈君,等.一种基于正弦波电压空间矢量的新型软起动器[J].电力电子技术,2014,48(7):28-31.
修改稿日期:2015-07-11
Study of Open-circuit Zero Voltage Vector and its Effect on Flux Trajectory in SVPWM
MENG Yanjing,ZHOU Peng,MA Huihai,CHEN Jun,WANG Sue
(College of Electrical and Information Engineering,Shaanxi University of Science and Technology,Xi’an 710021,Shaanxi,China)
Abstract:Proposed an open-circuit zero voltage vector to improve the disadvantages caused by the short-circuit zero vectors in traditional SVPWM,such as fast flux amplitude attenuation and electromagnetic torque ripple. In order to generate open-circuit zero voltage vector,4 kinds of novel effective switch modes had been extended on the basis of 8 kinds of traditional switch modes. The research results show that when traditional short-circuit zero voltage vector acts on motor,it works in dynamic braking,the flux amplitude decayed rapidly and electromagnetic torque is negative;when open-circuit zero voltage vector acts on motor,it works in the state of free stopping,the decay rate of the flux amplitude is about twice as slowly as the state of short-circuit zero voltage vector. Compared with short-circuit zero voltage vector,it has lower fluctuation of electromagnetic torque and the speed will be more smoothly when it switches to non-zero voltage vectors. Furthermore two kinds of zero voltage vectors were simulated by PLECS and analysis results is verified.
Key words:space vector pulse width modulation(SVPWM);zero voltage vector;flux trajectory;switch mode
收稿日期:2015-04-13
作者简介:孟彦京(1956-),男,博士,教授,博士生导师,Email:208091306@qq.com
基金项目:陕西省教育厅专项资助项目(2013JK1065)
中图分类号:TM301.2
文献标识码:A