DEHPSO算法在电传动系统能量管理中的应用
2016-04-06涂群章张晓辰潘明冯霞郑伟杰解放军理工大学野战工程学院江苏南京210007
涂群章,张晓辰,潘明,冯霞,郑伟杰(解放军理工大学野战工程学院,江苏南京210007)
DEHPSO算法在电传动系统能量管理中的应用
涂群章,张晓辰,潘明,冯霞,郑伟杰
(解放军理工大学野战工程学院,江苏南京210007)
摘要:为解决多能量源电传动系统的供能任务分配与管理问题,以能量管理控制策略为研究目标,结合理论分析与实验数据建立了面向实时控制的电传动系统Simulink模型。根据系统工作特点,提出了一种“功率跟随+恒温器”与模糊控制相结合的能量管理策略。为了进一步提升电传动系统燃油经济性,基于差分进化理论提出了一种混合粒子群优化算法(DEHPSO),并结合算法对功率跟随控制策略的转速切换值进行了优化。仿真结果表明:设计策略实现了供能任务的合理分配,使系统具备了较高的工作效率和功率输出能力。通过DEHPSO算法优化后,系统燃油消耗降低了8.27%,燃油经济性得到了进一步提高,为改善电传动系统综合工作性能提供了有效途径。
关键词:电传动;能量管理;粒子群优化算法;差分进化理论
电传动技术具有高效率、高输出、节能、环保等优点,目前在电动汽车、高速铁路机车、工程机械等领域得到了广泛应用[1]。电传动系统是指以电能作为主要转移能量并使车辆获得运动能力的多源供电传动系统,一种典型的履带车辆电传动系统如图1所示。
该系统的主动力源和辅动力源分别为发动机和蓄电池组。系统运行过程中,发动机将化学能转换为机械能并通过增速箱输入到发电机,由发电机为双侧驱动电机提供能量驱动车辆行驶。当外界载荷较高时,蓄电池亦可向系统输出补充功率,满足车辆动力性需求。在实际工作中,由于外界负载的剧烈变化,电传动系统往往需要承担庞大的供能任务。因此在满足动力需求的基础上,如何对能量进行管理并实现供能任务的合理分配已成为国内外研究人员关注的热点问题。目前,大多数能量管理策略均是基于门限逻辑和工况识别建立的,虽然该方法简单易行,但对参数漂移的适应能力较差。文献[2]中,Koot在传统控制方法中成功引入了动态规划法,使整车的燃油经济性提高了3%~5%;文献[3]采用负载功率跟随法,降低了发动机—发电机组随负载输出的响应时间;文献[4]采用模糊控制方法,将发动机负荷率和电池SOC作为模糊输入量对系统进行能量管理。以上方法虽然从一定程度上提高了系统供能效率,但往往为此牺牲了系统的燃油经济性与功率储备能力。另一方面,上述方法在设计完成后通常未考虑策略的进一步优化问题,无法保证策略在不同工况下的最优表现。
基于此,本文在建立电传动系统部件模型的基础上,提出了一种“功率跟随+恒温器”与模糊控制相结合的能量管理策略,并以提高系统燃油经济性为目标,利用差分进化混合粒子群算法对策略展开了优化研究。
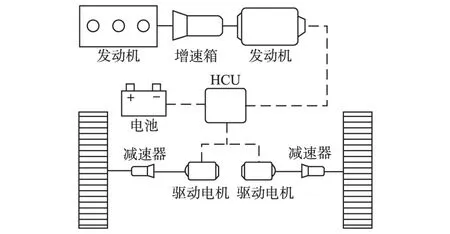
图1 电传动系统结构图Fig.1 Structure of electric drive system
1 电传动系统建模
混合动力电传动系统主要由发动机—发电机组(IGPU)、蓄电池组和驱动电机组成。为了便于研究电传动系统能量管理问题,需首先建立面向实时控制的系统仿真模型。
1.1IGPU模型的建立
为了实现能量的高效传递与输出,IGPU系统通常采用高功率电子调速柴油机和永磁同步电机完成能量供给任务。考虑到发动机与发电机的转速耦合关系,可将两者作为整体进行建模,发电机的机械力矩即为发动机的负载力矩,由转矩平衡可得:
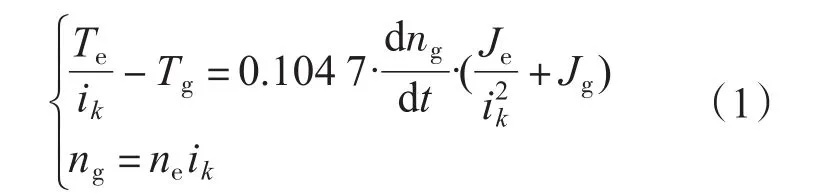
式中:Te,Tg分别为发动机和发电机输出转矩;ik为增速箱传动比;ne,ng分别为发动机与发电机转速;Je,Jg分别为发动机与发电机的转动惯量。
忽略发电机的内阻压降和转矩损失,则系统的总线电压与发电机电磁转矩为
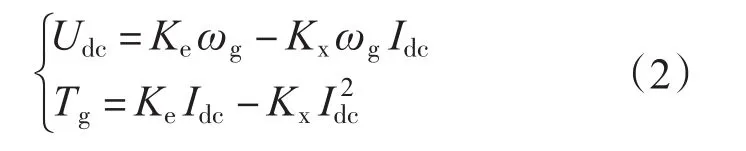
式中:Idc为直流母线电流;ωg为发电机转速;Ke,Kx分别为发电机的电感系数和阻抗系数,二者可由实验数据拟合确定。
由上式可以看出,在母线电压一定的情况下,为了使IGPU能够向系统输出功率,发电机感应电动势须大于母线电压,因此其最低转速为Udc/Ke,得到发电机电流与转速的关系为

发动机的燃油消耗率be=f(ne,Te)可通过台架试验得到的效率曲面查表得到,如图2所示。设燃油密度为ρe,发动机输出效率为ηe,发动机燃油消耗量可通过下式计算:
图2 发动机效率曲面Fig.2 The fuel consumption efficiency surface of engine
IGPU系统转速和转矩调节(即电子调速器模型)可通过2层PI控制环节实现。其中外层PI环节根据发动机目标功率与实际功率的偏差eP对目标转速ω*e进行调节,内层PI环节则在发动机外特性限制下,根据目标转速与实际转速的偏差eω对目标转矩T*e进行调节。设KP,KI分别为比例、积分控制系数,ωe为发动机实际转速,则有如下关系:
1.2驱动电机模型的建立
在对驱动电机建模时,重点关注其转速—转矩—效率特性,不考虑其内部电压与电流的变换关系。当系统需求转矩处于当前电机转速的输出能力范围内时,认为电机按目标转矩输出,反之则认为电机按当前转速最大转矩输出。考虑到电机控制器存在响应延迟时间,可在输出转矩之前添加一阶滞后环节,得到的电机输出转矩表达式为

式中:Tm,Treq分别为电机输出与目标转矩;Tbmax(nm),Tdmax(nm)分别为电机转速为nm时的最大制动和驱动转矩;1/(τs+1)为考虑控制器响应延迟而添加的一阶滞后环节;η为电机输出效率。η可由台架实验得到的电机效率曲面查表得到,如图3所示。
图3 驱动电机效率曲面Fig.3 The efficiency surface of driving motor
1.3蓄电池模型的建立
建模过程中,考虑到蓄电池进行充放电时的电压与阻抗特性,通常采用Rint等效电路法,将电池模型简化为理想电压源和充/放电电阻的串联回路,得到电池端电压与充/放电电流关系为

式中:Ucbat,Ufbat分别为电池组充、放电时的端电压;Icbat,Ifbat分别为充、放电电流;Rcs(SOC),Rfs(SOC)分别为电池组充、放电时的等效内阻;Ebat(SOC)为电池组开路电压。
设Q0为电池初始容量;Qmax为电池最大容量;Ibat(t)为电池输出电流(放电时符号为正),采用安时计数法得到的蓄电池任意时刻荷电状态SOC(t)可表示为

上述方法中的电池端电压Ucbat,Ufbat和等效内阻Rcs(SOC),Rfs(SOC)与任意时刻电池荷电状态SOC (t)有着固定的对应关系,该关系可通过充放电实验数据由查表插值法确定。
2 能量管理策略的设计
能量管理技术是决定电传动系统工作性能、燃油经济性和运行效率的关键技术。对于多源供能系统而言,如何对供能任务进行合理分配,在满足功率需求的基础上实现各部件的最佳工作状态是能量管理需解决的问题。考虑到蓄电池的输出能力有限,将IGPU作为主能量源,承担系统的稳态功率输出任务,蓄电池作为辅助能量源为系统的瞬态载荷提供功率补充。因此在设计策略时要按需管理和分配IGPU与电池组的目标功率,在满足能量需求的基础上,一方面让IGPU工作在经济区附近,减少系统油耗与排放,另一方面让电池组SOC维持在合理范围内(即“恒温”状态),有效发挥其功率补偿作用并实现对冗余能量的高效回收利用。
基于以上原则,本文以负载功率和蓄电池SOC作为输入变量,设计了一种“功率跟随+恒温器”与模糊控制相结合的能量管理控制策略,其基本流程如图4所示。
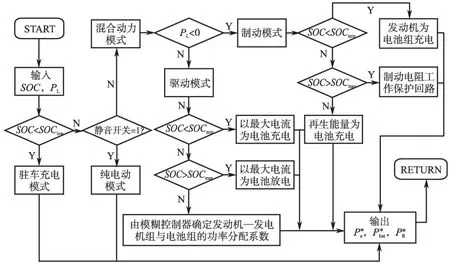
图4 能量管理策略流程图Fig.4 The flow chart of power management control strategy
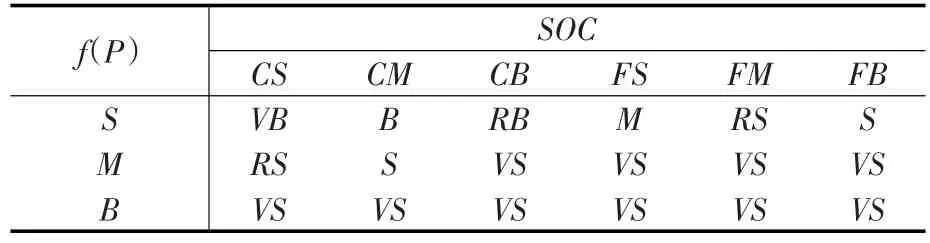
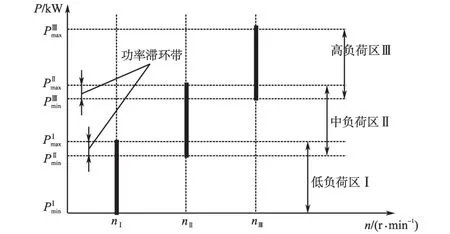
2.1蓄电池“恒温器”策略
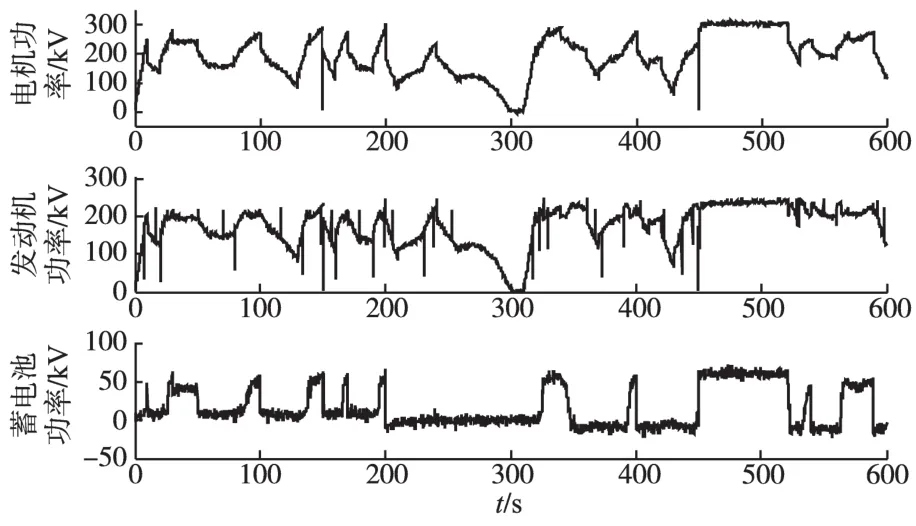
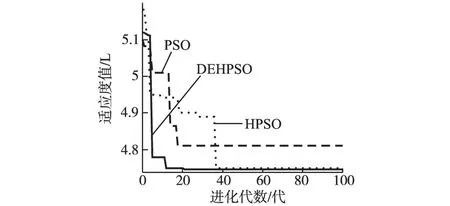
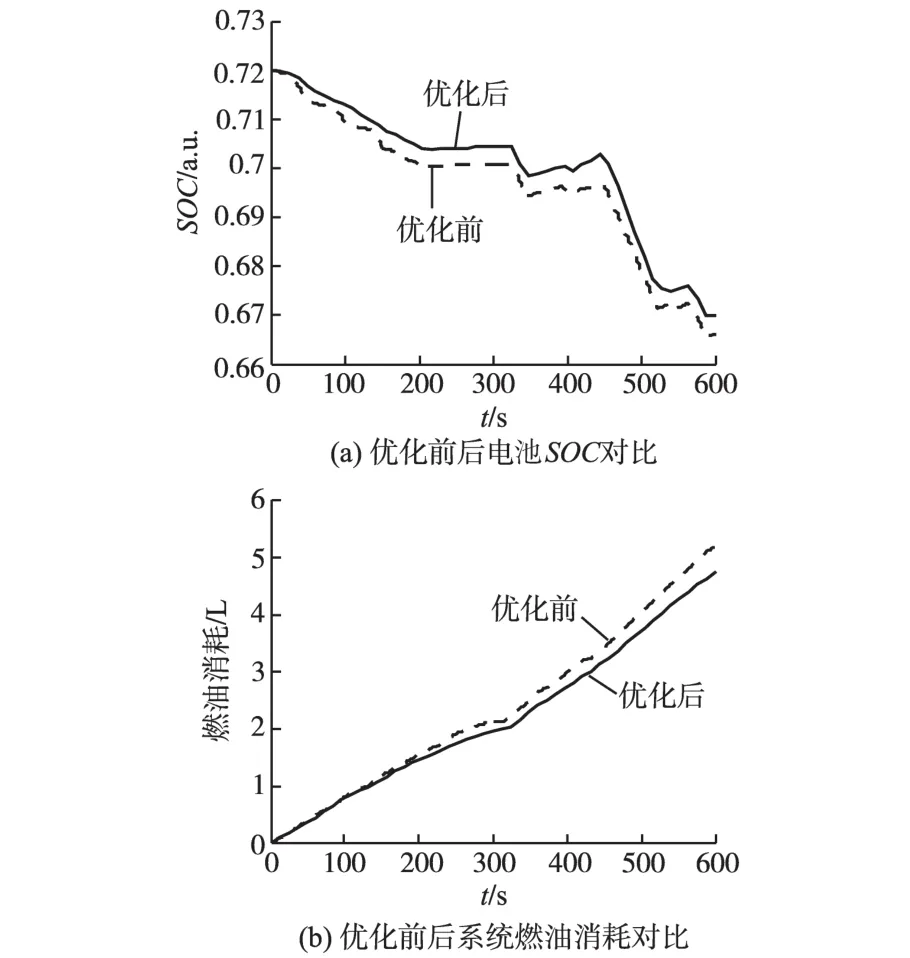
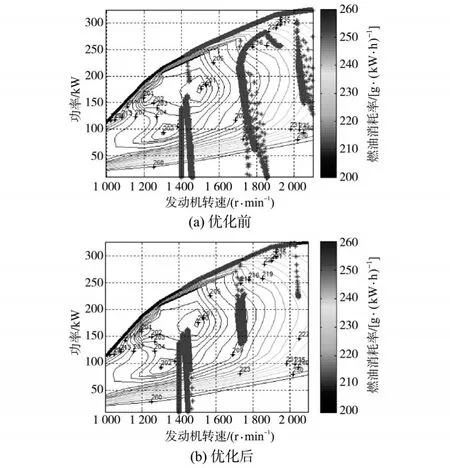
系统的工作状态可具体分为驻车充电、混合动力、纯电动3种模式,其中混合动力模式又可分为驱动状态和再生制动状态。各模式、状态间的转移与切换可通过输入变量的阈值判断实现:当系统静音开关开启时,IGPU处于关闭状态,由电池提供全部功率;当驱动电机处于制动状态时,电池组根据SOC值选择制动能量流向充电回路或保护回路;当系统处于混合驱动状态时,若SOC高于最大限制值则电池以最大电流放电,若低于最低限制值则以最大电流充电;当SOCmin 1)当发动机负荷率较高时降低功率分配系数,让电池组及时对需求功率进行补充; 2)当发动机负荷率较低时提升其功率分配系数,保证发动机在高负荷区工作; 3)由于SOC值在0.7附近时电池具有较高的充放电效率,因此当SOC较低或较高时应提升或降低IGPU功率分配系数,使电池进行小电流充/放电,保证荷电状态始终稳定在高效值附近。 选取S,M,B,CS,CM,CB,FS,FM,FB作为输入变量f (P),SOC的模糊子集,选取VS,S,RS,M,RB,B,VB作为输出变量xf的模糊子集,结合工程经验确定输入/输出变量的隶属度函数如图5所示。 图5 模糊控制隶属度函数Fig.5 Subordinating degree function of fuzzy control 采用Sugeno解模糊化算法和“if f(P) and SOC,then xf”语句表达形式,设计出18条模糊规则如表1所示。 表1 能量管理综合控制策略模糊规则表Tab.1 Fuzzy rules of power management control strategy 2.2IGPU功率跟随策略 IGPU管理策略又称为功率跟随控制策略,本文采用的功率跟随策略为多点转速切换控制策略,该策略具有响应速度快、发动机转速状态平稳和工作效率高等特点。其原理示意如图6所示。 图6 多点转速切换控制策略原理Fig.6 Principle of multi-point speed switch control strategy 在设计控制策略时,首先将系统功率需求按大小划分为若干区域,再结合负荷区的功率覆盖范围为发动机设计不同的转速等级。当需求功率稳定时,发动机维持当前转速等级。当需求功率变化超过当前负荷区的功率范围时,发动机通过调节转速在不同等级之间进行跃迁来满足系统的更高或更低功率需求。图6将负荷区划分为低负荷区(Ⅰ区)、中负荷区(Ⅱ区)和高负荷区(Ⅲ区),各负荷区的功率范围分别为与其对应设计的转速等级分别为nⅠ,nⅡ,nⅢ。由图6可以看出即负荷区存在功率交叠区域,当需求功率处于该区域时,发动机优先维持原有转速等级,减少转速频繁跃迁带来的系统失稳与动态功率损失。综合发动机万有特性曲线中低油耗区的分布情况,本文初步设定的转速等级分布为:nⅠ:1 400 r/min;nⅡ:1 700 r/min;nⅢ:2 100 r/min。转速切换的具体控制流程为:速度升级段,Ⅰ级→Ⅱ级→Ⅲ级,需求功率依序变化为:0 kW→160 kW→220 kW→Pemax;速度降级段,Ⅲ级→Ⅱ级→Ⅰ级,需求功率依序变化为:Pemax→200 kW→140 kW→0 kW。 由仿真分析可以发现:IGPU功率跟随策略中转速切换值的设计对于电传动系统综合性能有着较大影响。传统方法中,切换值没有固定的标定方法,一般根据工程实际或专家的主观经验确定,存在一定的优化空间。因此为了提升系统的燃油经济性和工作效率,可对能量管理策略的转速切换值进行优化。由前文分析可知,电传动系统是一个复杂网络系统,其能量管理的优化问题是一个非线性、多极值的寻优问题,一般优化算法已难以很好地解决,基于此,本文在标准粒子群算法(PSO)的基础上,结合差分进化理论提出了一种混合粒子群算法(DEHPSO),对能量管理策略进行优化分析。 PSO算法由局部和全局搜索两种形式组成,设粒子的搜索空间为d维解空间,n个粒子组成的粒子群分布可由位置矩阵X=(X1,X2,…,Xn)表示,任一粒子位置可由位置向量Xi=(xi1,xi2,…,xid)T表示,fi为粒子在位置Xi对应的适应度值。任一粒子速度可表示为Vi=(Vi1,Vi2,…,Vid)T,个体极值位置表示为Pi=(Pi1,Pi2,…,Pid)T,群体极值位置表示为Gk=(G1,G2,…,Gd)T,全局搜索PSO算法的速度与位置更新公式为[5] 式中:k为当前进化次数,k=1,2,…,kmax;D为参考维数,D=1,2,…,d;ω为粒子的惯性因子;c1,c2为学习因子;r1,r2为收敛因子。 全局PSO算法运算速度较快,但易陷入局部最优,局部PSO不易陷入局部最优,但其收敛速度较慢。因此本文综合两种算法的优点,提出一种混合PSO算法。设全局和局部PSO下第k代时粒子i的D维更新速度分别为Gk+1iD与Lk+1iD,则混合PSO下的粒子群速度和位置更新公式为 式中:b为混合因子,b∈[0,1]且取值随着迭代的进行由小变大。 为进一步增加粒子运动随机性,最大程度避免陷入局部最优,本文引入差分进化方法(DE),使“早熟”粒子在一定概率下通过交叉与重组获得新粒子,进一步提高粒子群算法的优化性能。现将差分进化处理过程叙述如下。 1)早熟判断:以适应度方差σ2作为“早熟”判断标准。设为第i个粒子第k代时的适应度值,为第k代时粒子群的平均适应度值,则第k代粒子群方差可定义为 2)变异处理:通过对目标微粒向量的差分缩放与合成来产生新的变异个体位置向量Hi,具体操作过程为 式中:i≠i1≠i2;Xki为目标变异个体;Gk为第k代全局最优个体;ς,υ为缩放因子,分别影响算法的收敛速度和种群的多样性。 3)交叉处理:选取变异粒子与原粒子进行交叉,通过粒子的维度值互换完成交叉操作。设Ck+1iD为第k代粒子经交叉后得到的D维位置值;CROSS为交叉概率;random为随机数,且random∈[0,1];Drand为设定交叉位。则交叉处理的数学表达形式为 4)淘汰处理:为了提高算法的优化效率,经变异与交叉处理后的粒子需与原粒子进行对比淘汰操作,其数学表达形式为 综上,DEHPSO算法具体流程可表示为:1)在解空间内随机初始化粒子位置与速度;2)根据目标函数计算粒子适应度值;3)根据适应度值寻找个体极值位置、邻域极值位置和群体极值位置;4)根据混合粒子群算法更新为式(13)和式(14)更新位置值与速度值;5)重新进行粒子适应度值计算;6)更新个体极值与群体极值;7)计算粒子群适应度方差,根据方差判断粒子是否“早熟”。若是,转8),否则,转9);8)根据式(16)、式(17)、式(18)对粒子进行变异、交叉、淘汰处理;9)是否满足终止条件,若是转8),否则转4);10)结束,输出最优适应度值和对应粒子位置。 选择某型20 t级电传动履带式推土机作为研究对象,参考GJB20016《军用履带式工程机械设计定型通用试验规程》[8],将其行驶功率谱作为电传动系统的能量输入,运行仿真得到的电传动系统功率分配结果如图7所示。 图7 能量管理控制策略仿真结果Fig.7 Simulation results of power management control strategy 由能量分配曲线分析可知,尽管驱动电机负载功率值较大、变化速率较快,系统仍能够实现电能的高效管理与分配。低负载需求时,供能任务主要由IGPU承担,使蓄电池保持一定的功率储备;高负载需求时,电池能够及时提供补充功率,提高了IGPU的负荷率与燃油经济性。整个过程中,系统具有较高的运行效率,说明设计的能量管理策略取得了良好的控制效果。 为进一步提高电传动系统燃油经济性,本文将转速切换值nⅠ,nⅡ,nⅢ作为控制变量(取值区间为:[1 350,1 450],[1 650,1 750],[2 050,2 150]),限定电池SOC在阈值范围(-ε,ε)内(蓄电池的终值SOC水平与终值燃油消耗水平存在制约关系),以降低IGPU燃油消耗为主要目标,得到的优化目标函数为 式中:Preq为驱动电机需求功率;m为单位换算系数。 为了综合对比算法性能,分别以全局粒子群、混合粒子群和差分进化混合粒子群作为优化算法,设置初始PSO种群规模为50,粒子维数为3,进化代数为100并运行仿真,得到的粒子群进化过程曲线如图8所示。 图8 粒子群进化过程曲线Fig.8 The particle swarm evolution curve 由图8分析可知,PSO虽然能够很快收敛,但易陷入局部最优;HPSO虽然优化效果较好,但其优化时间较长,需进化35代以后才能获得精确值;相比之下,DEHPSO算法在20代左右即达到收敛,且取值精确、优化效果明显。将优化得到的最优切换值nⅠ:1422r/min,nⅡ:1746r/min,nⅢ:2 134 r/min代入原策略中并运行仿真,得到优化前后系统燃油消耗和电池SOC对比图如图9所示。 图9 优化前后结果对比图Fig.9 The result comparison before and after optimization 由图9分析可知,蓄电池终值SOC由原来的66.61%增加到66.82%,燃油消耗由原来的5.172 6 L减小到4.744 7 L,说明在保证SOC处于阈值范围内的条件下,通过优化转速切换值,系统的燃油经济性显著提升。优化前后发动机工作点分布如图10所示。 图10 优化前后发动机工作点分布对比图Fig.10 Distribution chart of engine working points before and after optimization 可以看出,与原策略相比,优化策略具有更多位于燃油经济区的发动机工作点,且工作转速均匀、稳定,说明IGPU的燃油消耗得到了有效降低,设计的DEHPSO算法取得了良好的优化效果。 本文以电传动系统能量管理策略为研究对象,通过仿真得到以下结论: 1)结合理论分析与实验数据,在Simulink环境下建立了电传动系统仿真模型; 2)提出了一种“功率跟随+恒温器”与模糊控制相结合的能量管理策略,为进一步提高系统燃油经济性,基于差分进化混合粒子群算法对控制策略中的转速切换值进行了优化; 3)以某型电传动履带车辆行驶功率谱为算例,通过离线仿真发现:在满足功率需求的基础上,相比于未优化策略,DEHPSO优化的能量管理策略燃油消耗降低了8.27%,且IGPU工作高效、稳定,发动机工作点大部分位于燃油经济区内。由此说明本文提出的能量管理策略优化方法取得了良好的效果,是改善电传动系统经济性和工作效率的有效途径。 参考文献 [1]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002. [2]Koot M W T. A Dynamic Programming Approach for Power Management in Wireless Video Sensor Networks[J]. IEEE Trans.Vehicle Technology,2006(58):843-854. [3]Liu J,Peng H. Modeling and Control of Hybrid Electric Vehi⁃cles[J]. IEEE Trans. Control System Tech,2008(16):1242-1281. [4]陈泽宇. 40吨级全电履带车辆电能分配与控制策略研究[D].北京:北京理工大学,2010. [5]Parsopoulos K E,Vrahatis M N. Unified Particle Swarm Opti⁃mization in Dynamic Environments[C]//E-voWorks,2005:590-599. [6]Pulido G T,Coello A,Coello C. Using Clustering Techniques to Improve the Performance of a Multi Objective Particle Swarm Optimizer[C]//NCS 3102:Proc of the Genetic and Evolutionary Computation(GECCO 2004). Berlin:Springer,2004:225-237. [7]Li Ling-lai,Wang Ling,Liu Liheng. An Effective Hybrid PSO⁃SA Strategy for Optimization Its Application to Parameter Esti⁃mation[J]. Applied Mathematics and Computation,2006,179(1):135-146. [8]总参工程兵科研二所.军用工程机械试验学[M].北京:海洋出版社,1994. 修改稿日期:2015-07-07 Application of DEHPSO Algorithm in Power Management of Electric Drive System TU Qunzhang,ZHANG Xiaochen,PAN Ming,FENG Xia,ZHENG Weijie Abstract:Aiming at the problem of power distribution and management of multi-source electric drive system,the power management control strategy was investigated. Combined with theoretical analysis and experimental data,real-time control oriented Simulink models of electric drive system were established. According to the working characteristics of system,a novel power management control strategy which combined with“power-following and thermostat”and fuzzy theory was proposed. In order to improve the fuel economy,a hybrid particle swarm optimization algorithm based on differential evolution theory was put forward and the value of switching speed point of power-following control strategy was optimized. The simulation results indicate that the designed strategy obtained good effects on power management,which achieved high working efficiency and power output capacity. Optimized by DEHPSO algorithm,fuel consumption of the system is reduced by 8.27% and the fuel economy is obviously improved,which will offer an effective way to improve integrated performance of electric drive system. Key words:electric drive;power management;particle swarm optimization algorithm;differential evolution theory 收稿日期:2015-03-02 作者简介:涂群章(1969-),男,博士后,教授,Email:zxcswift@163.com 基金项目:国家自然科学基金(51175511) 中图分类号:TP391.9;TH39 文献标识码:A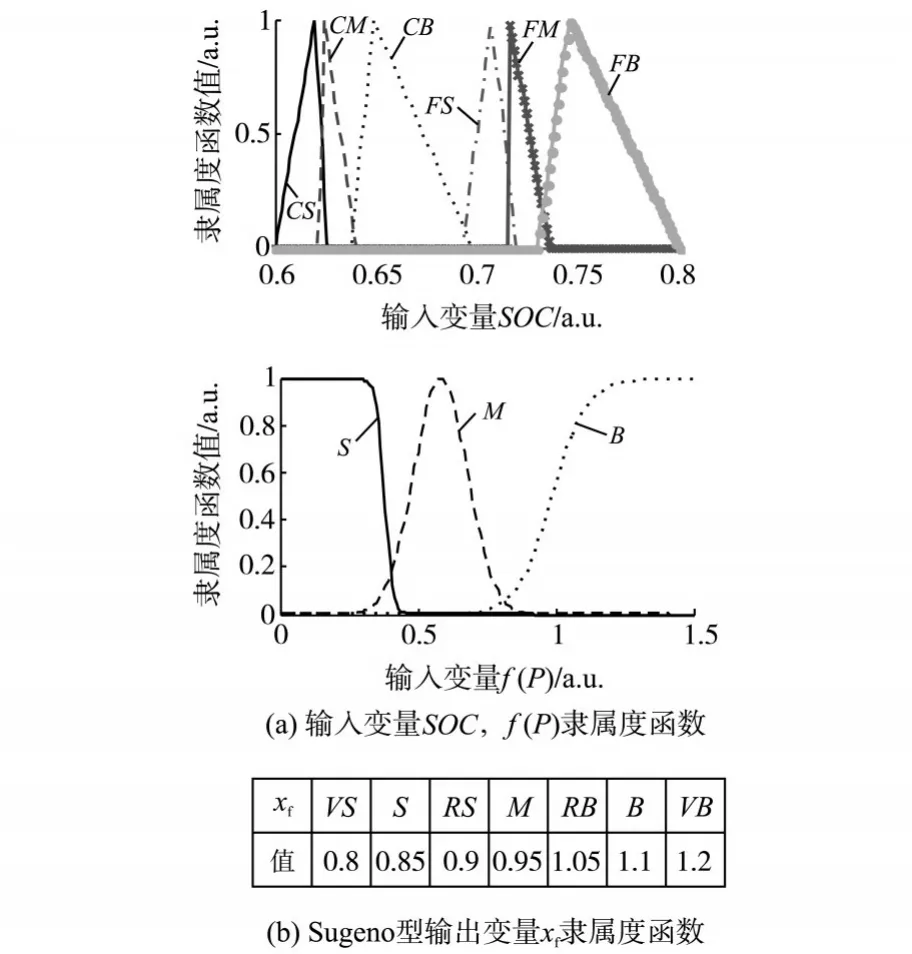
3 基于DEHPSO的策略优化








4 仿真实验验证

5 结论
(College of Field Engineering,PLA University of Science and Technology,Nanjing 210007,Jiangsu,China)