一种基于非均匀目标的空间相机平场定标方法
2016-03-30岳巾英李素文何玲平
岳巾英,李素文,何玲平
(1.长春工程学院 理学院,吉林 长春 130021;
2.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
一种基于非均匀目标的空间相机平场定标方法
岳巾英1,李素文1,何玲平2
(1.长春工程学院 理学院,吉林 长春130021;
2.中国科学院长春光学精密机械与物理研究所,吉林 长春130033)
摘要:平场定标是空间相机研制过程中必不可少的定标项目。目前,普遍使用均匀照明目标进行空间相机的平场定标,而该方法由于依赖于目标的均匀性,其应用存在一些缺陷。提出了一种基于非均匀目标的平场定标方法,摆脱了对目标均匀性的依赖,具有实际应用价值。首先,基于多幅非均匀目标图像像元灰度的相关性,建立了相机像面响应度分布计算模型;采用最小二乘迭代法对该模型进行了求解,并编写程序进行仿真验证,验证结果表明,在图像信噪比高于25 dB的情况下该方法定标精度优于0.5%;最后,根据该方法的特点,给出了实际定标试验的操作流程。
关键词:平场定标; 非均匀照明; 空间相机; 模型仿真
引言
空间相机是利用光学技术获取目标信息的航天有效载荷,是一种获取地球地理、宇宙天体信息的有力工具,在对地遥感测绘、资源普查、减灾防灾、国防军事、空间天文学及空间天气预报等领域,有着重要的应用价值。为了提高获取数据的准确性,空间相机一般要进行一些地面和在轨的平场定标试验。由于CCD等传感器像元间响应差异性、光学系统的渐晕现象及光学链路中元件可能被污染等情况的存在,空间相机像面上不同位置可能存在响应度非均匀性[1-2]。这将导致同一辐射强度目标在像面不同位置成像的图像灰度输出不相等,使得相机获得的数据存在误差。这种像面响应非均匀性不仅直接影响目标辐射强度的测量精度,而且会在图像上带来或亮或暗的阴影,导致图像分辨性能降质,因此平场定标是空间相机研制过程中的一项重要工作。
平场定标的目的是解决相机像面响应的非均匀性,一般通过对一个人造均匀照明的目标拍摄一幅图像,即可测量像面上不同像元间响应非均匀性[3]。常用人造均匀照明目标主要有标准漫反射板和积分球光源等,其中标准漫反射板是一种表面涂有漫反射材料的平板,光源辐射光线经其漫反射后强度近似朗伯分布,在一定条件下具有较好的照度均匀性;积分球光源是一种内部漫反射照明、表面有开口的光源,与漫反射板相比其开口处辐射强度更加接近朗伯分布,开口处的照度均匀性更好,可达到较漫反射板更高的定标精度[4-7]。尽管目前制作工艺已有较大的进步,但漫反射板的定标精度一般只能达到5%,而积分球的定标精度也不高于1% 。目前,常用平场定标存在以下困难: 1) 随着空间相机口径的增大,对积分球体积的要求会急剧增加,使得试验成本难以负担; 2) 在轨的平场定标只能使用定标精度有限的漫反射板方案; 3) 对于真空紫外波段来说,目前尚无该波段的人造均匀照明目标,无法进行平场定标。因此,采用均匀照明物成像的平场定标方法存在一些应用缺陷,需要探讨一种新的平场定标方法,克服定标过程中对均匀照明的依赖[8-9]。基于此,本文拟提出一种不需要以均匀照明物为成像目标的平场定标方法。
1非均匀照明平场定标原理推导
对一个理想的、不存在像面响应非均匀性的光学成像系统来说,目标的图像灰度与目标强度成正比关系,而与目标在像面成像位置无关。实际上,由于成像系统的各像元之间的响应非均匀性、光学系统渐晕、元件污染等原因,像面上不同位置像元的响应系数是不同的,使得目标图像灰度不再与其强度成正比例关系,式(1)为一个与像面位置相关的函数
(1)
式中:oi为目标实际强度;di为光学成像系统灰度输出;x为像元位置;r(x)为在像元x处的响应系数;i表示多幅图像中一幅。通过平移目标或者相机视场偏转等方式,相机可以拍摄多幅同一目标在像面上偏移不同距离的图像。如果用o代表目标第一幅图像拍摄时的强度分布,oi代表拍摄第i幅图像时目标的强度分布,此时目标像在像面上偏移了像元距离ai。假设在图像拍摄期间目标的强度是稳定的,两者关系则为oi(x)=o(x-ai)。此时,两幅图像中的像元灰度存在一种相关性,此相关性可以由图1直观地表示(图中P(i)为像元i的灰度),也可以用对应像元的响应度比值来表达
(2)
对式(2)两边取对数,设R(x)=ln(r(x)),Di=ln(di),可得
(3)
由于相机系统的像面响应度分布R(x) 是固定的,不随拍摄次数变化,而Di、Dj是已知采集图像的灰度分布,因此式(3)是一个关于未知数R(x)的线性方程。如果成像目标能够覆盖像面大部分区域,并在像面上以已知的像元偏移间隔采集足够多图像,可以实现对像面响应度分布R(x)的过采样,得到多个与式(3)相同的方程式,从而组成一个可求解的方程组,该方程组中方程数超过未知数个数,是一个关于R(x)的超定线性方程组。

图1 目标位置偏移图像灰度相关性示意图
绝大多数情况下,超定线性方程组没有古典意义的精确解。最小二乘法是求解超定线性方程组最常用的算法,它能提供一个最接近真实解的近似解,使得残差的2-范数最小。对于式(3)来说,该超定线性方程组的最小二乘解满足
(4)
对式(4)关于R(x)微分,得到
(5)
设式(5)的初始解为R0(x)=0,则其迭代解为
(6)
其中
n(x)为求和符号内多项式的数量。
式(6)为式(4)的最小二乘法迭代求解模型,根据该模型编写程序可以实现相机像面响应系数分布的求解。计算过程中每一次迭代计算都涉及大量矩阵运算,且需要经过多次迭代才能接近精确解,因此计算量颇为巨大,需要使用适合矩阵运算的语言进行编写。
2模型仿真验证
为了验证第1节推导得到的相机像面响应非均匀性的经典最小二乘法求解模型的正确性,本文采用IDL(interface definition language)语言编写程序实现该模型的求解算法,并建立仿真模型进行验证。IDL语言是一种常用于航天遥感图像处理的编程语言,具有面向矩阵、语法简单的特点,能够快速分析超大规模的数据,且内置多种高级图像处理、数学计算算法,比较适合本文工作的进行。
整个仿真过程包括: 1) 模拟生成相机的像面响应度系数分布; 2) 模拟生成一个强度符合高斯分布的成像目标; 3) 模拟该目标在相机像面上的成像,并在图像中添加随机噪声; 4) 模拟该目标在相机像面上位置偏移成一组图像; 5) 编程实现经典最小二乘法求解模型,并使用该模型对所有位置偏移目标图像进行处理,求解出最佳迭代解; 6) 计算最佳迭代解与实际生成的像面响应度分布模型的符合度,评价此求解模型的求解精度。
图2为模拟生成的高斯强度分布目标在像面中心所成的像,图像的信噪比为200 dB。图3为模拟生成的相机像面响应度分布,图4为对所有图像进行经典最小二乘法求解模型计算获得的相机像面响应度,逐像元计算图3和图4中响应度平均误差为0.17%。本文分别模拟了图像信噪比分别为200 dB、100 dB、50 dB、25 dB情况下,评估求解模型的所获得的平场定标结果精度,结果如表1所示。将实际像面像面响应度系数分布与求解的像面响应度系数分布相减得到像面响应度系数求解误差,提取其中心一行并显示如图5至图8。从上述图表中可以看出,不同图像信噪比值下,对应最大的平场定标相面响应度最大偏差为0.47%,因此基于非均匀照明目标的平场定标方法定标精度较高,具有较大的实用价值。

图2 高斯目标仿真图像
图3实际像面响应度分布

图4 定标得到像面响应度分布

序号图像信噪比/dB最大偏差/%平均偏差/%12000.610.1721000.890.203501.410.284252.440.47

图5 S/N=200 dB像面响应度系数误差
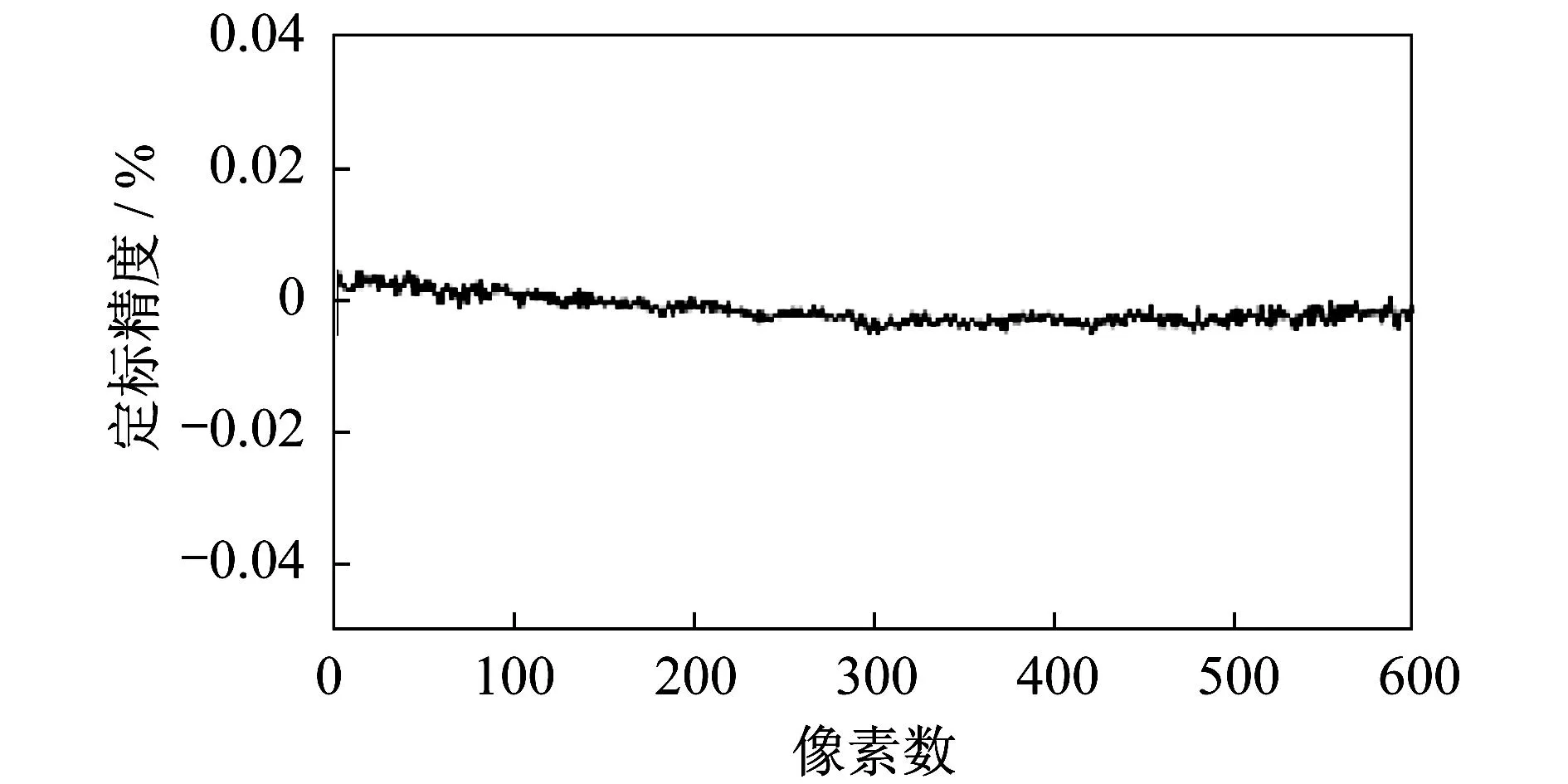
图6 S/N=100 dB时像面响应度系数误差

图7 S/N=50 dB时像面响应度系数误差

图8 S/N=25 dB时像面响应度系数误差
3非均匀照明平场定标过程
采用第一节中推导的最小二乘法迭代求解模型进行空间相机的平场定标,摆脱了对均匀照明条件的依赖,具有以下优点: 1) 降低了对试验条件的要求,试验的可操作性和成本优势改进明显; 2) 定标精度不再受照明均匀性的限制,能够实现超高精度的平场定标; 3) 可以直接使用成像目标进行平场定标,非常适合空间相机的在轨定标; 4) 可用于真空紫外等短波波段光学仪器的平场定标。这些特点使得该方法具有巨大应用价值。
非均匀照明平场定标即可以进行CCD部件级别的平场定标,也适用于整机平场定标。CCD部件级别的平场定标流程如下:
(1) 点亮CCD照明光源并调节亮度,使得CCD曝光不饱和;
(2) CCD通过精密平移台在两维方向以数个像元距离等间距平移,并拍摄图像;
(3) 平场求解模型需要以像元精度知道目标在像面上平移间距,此平移量可以通过使用高精度平移台来获取,也可以通过目标识别的图像处理算法得到,后者更为实用;
(4) 采用第2节中编写的求解模型程序处理所有目标图像数据,得到CCD的响应系数分布函数。
整机平场定标过程有些不同,需要相机转动改变光轴方向来实现目标在像面上的移动,具体流程如下:
(1) 相机固定在一个方位、俯仰两维转动平台上,调整成像目标使得两者正对;
(2) 调整成像目标亮度,使得相机成像不饱和;
(3) 相机正对成像目标成像,转动平台方位、俯仰,使得目标成像在像面不同位置;
(4) 采用目标识别算法处理所有目标移动图像,获取每幅图像中目标的移动量;
(5) 采用相机像面响应度迭代求解模型,依据所获得的图像数据反演计算出相机的像面响应度系数分布,即完成平场定标。
4结论
本文在总结现有空间相机平场定标技术的基础上,针对其存在的依赖均匀照明条件等问题,提出一种不需要均匀照明的平场定标方法,详细介绍该方法的使用原理,并编程进行仿真验证测试。测试结果表明该方法可以实现较高精度的平场定标,最后给出该平场定标方法在实际应用中的操作流程。
参考文献:
[1]MACKAY C D.Charge-coupled devices in astronomy[J].Annual Reviews of Astronomy and Astrophysics,1986,24(1):255-283.
[2]BERRY R,BURNELL J.The handbook of astronomical image processing [M].2nd ed.Richmond,Va:Willmann-Bell,2005.
[3]江孝国,张开志,李成刚,等.图像平场校正方法的扩展应用研究[J].光子学报,2007,36(9):1587-1590.
[4]邢进,王淑荣,李福田.空间紫外遥感光谱辐射计光谱辐亮度定标三种方法的比较[J].中国激光,2006,33(4):509-515.
[5]HEATH D F,WEI Z Y,FOWLER W K,et al.Comparison of spectral radiance calibrations of SBUV-2 satellite ozone monitoring instruments using integrating sphere and flat-plate diffuser techniques [J].Metrologia,1993,30(4):259-264.
[6]周胜利.积分球在实验室内用于空间遥感器的辐射定标[J].航天返回与遥感,1998,19(1):29-34.
[7]夏果,周海洋,刘康,等.反射积分球建模及分析[J].光学仪器,2013,35(4):1-5,11.
[8]BARNES W L,PAGANO T S,SALOMONSON V V.Prelaunch characteristics of the Moderate Resolution Imaging Spectroradiometer(MODIS) on EOS-AM1 [J].IEEE,Transactions on Geoscience and Remote Sensing,1998,36(4):1088-1100.
[9]吴国栋,张晓辉,韩昌元,等.空间CCD相机辐射标定方法的应用研究[J].测试技术学报,2004,18(4):325-329.
(编辑:程爱婕)
A flat field calibration method of space camera based on a non-uniform target
YUEJinying1,LISuwen1,HELingping2
(1.College of Science,Changchun Institute of Technology, Changchun 130021, China;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences, Changchun 130033, China)
Abstract:Flat field calibration is an essential calibration project for space camera. At present the uniform illumination target is generally used to fulfill space camera′s flat field calibration, but this method is limited in application because it relies on the uniformity of the target. A new flat field calibration method was proposed based on the non-uniform target. This method has a great practical value as it is no longer dependent on the uniform target. At first, a responsivity distribution calculation model of the camera image plane was established based on the pixels gray correlation of multiple non-uniform target images. Then by using the least-squares iteration method, the calculation model was solved. Meanwhile, a simulation program had been developed to test this calibration method. The test results show that the new calibration method′s precision is better than 0.5% when the image signal-to-noise ratio is higher than 25 dB. Finally, based on the characteristics of this method, a practical calibration process has been proposed.
Keywords:flat field calibration; non-uniform illumination; space camera; model simulation
中图分类号:O 432.1
文献标志码:A
doi:10.3969/j.issn.1005-5630.2016.01.008
作者简介:岳巾英(1983—),女,实验师,主要从事光学设计、光学检测等方面的研究。E-mail:yuejy444@163.com通信作者: 何玲平(1982—),男,副研究员,主要从事短波光学、光学检测等方面的研究。E-mail:hlp200201@163.com
基金项目:国家自然科学基金(NSFC 11304021)
收稿日期:2015-05-11
