基于嵌入式通信系统的变量施肥虚拟样机优化设计
2016-03-23邓明华汪小志鲍秀兰
葛 蓁,熊 琼,邓明华,汪小志,鲍秀兰
(1.武汉工商学院 信息工程学院,武汉 430200;2.南昌大学,南昌 330031;3.华中农业大学 工学院,武汉 430070)
基于嵌入式通信系统的变量施肥虚拟样机优化设计
葛蓁1,熊琼1,邓明华1,汪小志2,鲍秀兰3
(1.武汉工商学院 信息工程学院,武汉430200;2.南昌大学,南昌330031;3.华中农业大学 工学院,武汉430070)
摘要:为了达到液态施肥机高速作业的目标,提出了一种新的施肥机施肥变量控制的方法,该方法主要采用Pro/E和ADMAS联合仿真的方式对机构的机械运动轨迹进行验证,采用模糊控制和二阶差分算法降低施肥量的误差,使用PLC实现施肥数据的处理和通信。为了验证该方法的有效性和可靠性,应用三维造型设计软件Pro/E,绘制机构各零部件模型并装配,通过改变保存文件的类型实现Pro/E与ADAMS数据交换,在ADAMS中建立机构虚拟样机和运动学仿真,得到了施肥机虚拟样机的运动轨迹。最后,通过PLC嵌入式通信系统的优化,得到了虚拟样机施肥量随速度变化曲线,并将优化前后的施肥准确度和效率进行了对比。通过对比发现:使用PLC嵌入式系统优化后的施肥机,施肥的精确性得到了明显的改善,且施肥效率较高,为变量施肥控制的研究提供了理论参考。
关键词:变量施肥;虚拟样机;二阶差分;嵌入式
0引言
传统施肥机械都是对农作物进行开沟固体施肥,若遇地面干燥土质较干,则作物对肥力吸出较慢,不利于作物生长;若遇土质太湿,不利于开沟施肥,从而对作物生长期的需肥状况造成不利影响,若采用人工施肥则提高了劳动强度且效率低下。液态施肥机克服传统施肥机的缺点,可将化肥直接施在作物根系侧旁,作物吸收快、利用率高,节约肥料,能有效减轻环境污染。因此,液态施肥机极具应用价值。液态施肥的关键技术是对液态肥施肥流量的控制,如果流量控制不合理,不仅会造成肥料的浪费,也会降低粮食的产量。
本文设计了一种新的施肥机变量控制方法,运用 Pro/E软件绘制出机构各零部件的三维实体图和机构装配图,而后转到专业的运动学仿真软件下,添加约束和运动副,最终形成系统的虚拟样机。对虚拟样机进行运动轨迹准确性验证之后,采用PLC算法对排肥量的准确性进行优化,并对施肥的准确性和效率进行了计算分析,为施肥机变流量精确控制的优化提供了一种新的设计方法。
1变量流控制设计原理
数值仿真模拟应用到施肥机的设计过程中,可以大大提高机械的设计效率,缩短设计周期,降低设计成本。其设计过程如图1所示。

图1 施肥机变流量控制过程
施肥机的变流量控制过程:首先利用Pro/E软件创建施肥机虚拟样机的模型,然后利用ADMAS软件对施肥机的运动轨迹进行动力学仿真;如果运动轨迹不正常,则需要重新建模,如果运动轨迹正常,则对速度模型机械优化;同时,利用二阶差分和模糊控制降低施肥量控制误差,最终提高施肥量的控制精度。
图2为PLC嵌入式系统的设计总体框架。由图2可以看出:嵌入式系统的主要控制过程是依据施肥机的行进速度,对施肥量进行控制,并利用IC卡对施肥量的大小进行决策控制,完成施肥的变流量自动化控制。
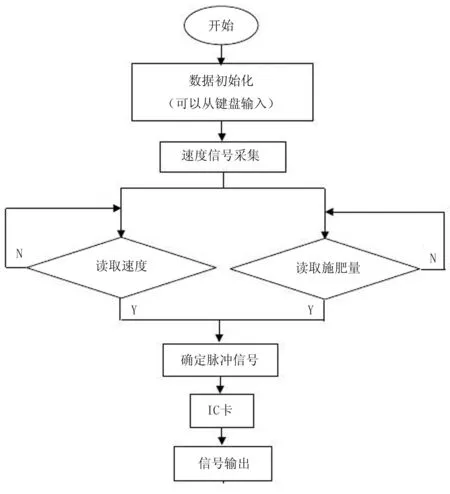
图2 PLC嵌入式系统设计框架
2虚拟样机力学模型和优化设计
为了实现施肥机施肥的变流量控制,需要对施肥过程中的主要变量进行分析。施肥量一般和施肥机3方面的因素有关,包括施肥的跟进速度、施肥机的行距和单行排肥器的排肥量。在施肥过程中,施肥机每公顷的施肥量为
(1)
其中,q表示单行排肥器的排肥量(L/s);v表示施肥机前进速度(km/h);S表示施肥机行距(m)。在这3个量中,专家系统可以提供施肥量的数据,并存储在IC卡中,进行施肥决策;施肥机的前进速度可以利用传感器测出,机具的行距由施肥机的具体型号确定,排肥器的排肥量由排肥转速控制。同时,可以通过定量实验得到排肥转速的三元一次方程为
q=an3+bn2+cn+d
(2)
其中,a、b、c、d值是由不同化肥类型确定的,通过反复实验即可确定。三次方程的三次项和二次项系数都很小,可以忽略不计,因此可得
q=an+b
(3)
将式(3)代入式(1),得
(4)
最终得到了排肥轴的转速,转速可以通过模糊控制来实现排肥量的精确控制。首先,定义排肥量的误差有
-2rad/s≤n(i)=n(i)-n(i-1)≤2rad/s
(5)
施肥机模糊控制转速的基本误差域为n[-2,2],利用模糊控制将误差域进行离散化,有
(6)
其中,x∈[r,z],r表示误差上限值,z表示误差下限值,y为离散度。为了加速残差的收敛,可以采用神经网络训练的方式,定义误差的一阶差商为
(7)
二阶训练差商定义为
(8)
计算机上计算均差表的公式为
(9)
根据差商定义,把x看成[r,z]上一点,可得
(10)
把后1式代入前1式可得
(11)
利用误差值,控制器在端子输出电压信号,通过 PLC 进行比较计算之后实现切换,最终使泵电机及变频器均能够正常工作,调节施肥的转速。其使用的主要控制程序如下:
ld m1
ld x0
or y5
anb
out y5
mov k10 d2
rst m14
rst m19
rst m24
rst m29
ld m1
ani m19
ani y5
ldi m200
or m201
anb
out y0
……
3虚拟样机运动学仿真
3.1Pro/E建模和ADAMS运动学仿真
为了验证所设计的施肥机变流量控制算法的有效性和可靠性,采用Pro/E和ADMAS联合仿真的形式,对施肥机虚拟样机进行动力学仿真,以期得到施肥机的施肥速度和精度的验证结果。机构总体装配之后,需要利用Pro/E软件建立虚拟样机的模型,本研究采用自底向上的建模方式,建立虚拟样机的基本部件齿轮,如图3所示。

图3 虚拟样机齿轮模型
仿真时,将各部件进行装配后导入到ADMAS软件中,运用软件自带的机构/运动分析功能进行运动学仿真。设置齿轮之间的传动比及机构前进速度,得到喷肥针尖的绝对运动轨迹,如图 4 所示。
相对于 Pro/E而言,ADAMS 的仿真能力能更强。由计算结果可以看出,仿真结果符合预期的设计要求,得到生产要求的相对运动轨迹为泪滴型轨迹,从而验证了模型建构和仿真分析的正确性。

图4 虚拟样机运动轨迹
3.2样机嵌入式系统优化测试
为了实现虚拟样机排肥速度的控制,本研究主要采用霍尔元件来测定速度。霍尔软件对露天灰尘的环境适应好,价格相对便宜,体积小,性能好。此元件采用OC门,在输出端与电源之间要接一个电阻,为了提高其带负载能力,接1个三极管放大电路。其原理图如图5所示。
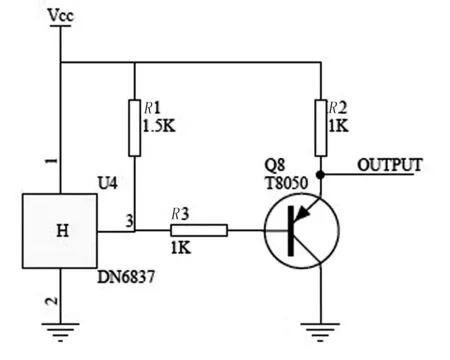
图5 测速电路图
其中,集成霍尔传感器一般片内设有稳压电路及施密特电路,通过晶体管的集电极输出信号,并且输出的脉冲信号不需进行整形。这种传感器还具有时滞特性,此特性可以防止噪声干扰。
施肥速度进行优化后,可以将施肥速度按一定的顺序存储在数据存储卡中,在田间施肥过程中,由单片机按操作单元对存储卡进行读取。本设计中采用ATMEL公司生产的AT24C02芯片,具有体积小、功耗低的特性,其电路原理如图6所示。

图6 IC卡电路图
3.3仿真结果分析
通过对虚拟样机的仿真模拟和实验测试,得到了虚拟样机的运动轨迹和流量控制的参数数据,且运动轨迹和预期想要得到的轨迹吻合性较好。排肥量随时间的变化曲线如图7所示。

图7 排肥量随速度变化曲线
由图7可知:随着速度的变化,排肥机的排肥量发生了较大的变化;随着速度的加快,排肥量在排肥速度的控制下逐渐加快,有效地实现了快速均匀的施肥效果。
如表1所示,通过的10次施肥实验,使用PLC优化控制的施肥机和普通施肥机的施肥精确程度存在很大的差异。其中,使用PLC嵌入式系统优化后的施肥机,其施肥的精确性得到了明显的改善。

表1 施肥准确率测试结果表

续表1
表2表示在100m单行情况下的施肥时间。由表2可以看出:使用本文设计的PLC优化控制虚拟样机可以大大缩短施肥的时间,提高了施肥的效率,是一种既精确效率又高的施肥机械结构。

表2 施肥时间测试结果表
4结论
依据施肥机排肥器排肥原理,采用Pro/E和ADMAS联合仿真方法,使用PLC嵌入式通信系统,设计了一种新的变流量控制的施肥虚拟样机,大大提高了施肥机的作业精度和作业效率。
利用模糊控制算法对施肥机的排肥速度进行了控制,使用二阶差分对排肥的误差进行了分析,最后对利用联合仿真和虚拟样机实验,得到了排肥量随施肥机行进速度的变化曲线,以及施肥机工作效率和工作精度的分析结果。
通过对结果的分析发现:使用PLC嵌入式系统优化后的施肥机,施肥机的工作性能得到了明显的改善,施肥精度和效率都得到了大幅度的提高,可在变量施肥机的设计过程中进行推广使用。
参考文献:
[1]裴艳兰,和丽,许纪倩.高速水稻插秧机中非圆齿轮齿廓的图形仿真[J].机电产品开发与创新,2007, 20(5):96-97.
[2]冯金龙,王金武.探针注入式深层施肥机构的运动分析[J].农机化研究,2007(4):64-65.
[3]王金峰,王金武,葛宜元.深施型液态施肥装置的设计与试验[J].农业机械学报,2009,40(4):58-62.
[4]王金武,纪文义,冯金龙,等.液态施肥机的设计与试验研[J].农业工程学报,2008,24(6):157-159.
[5]王金峰,王金武.液态变量施肥机两种不同变量机构的研究[J].农机化研究,2007(1):123-125.
[6]张书慧,马成林,吴才聪,等.一种精确农业自动变量施肥技术及其实施[J].农业工程学报,2003,19(1): 129-131.
[7]张书慧,马成林,杜巧玲,等.精确农业自动变量施肥机控制系统设计与实现[J].农业工程学报,2004, 20(1):13-116.
[8]张迎新.单片微型计算机原理、应用及接口技术[M].北京:国防工业出版社,2004:194-205.
[9]王晋生,王桂英.小麦机械化播种实践[J].农业技术与装备,2009,09(173):21-22.
[10]许剑平,谢宇峰,陈宝昌.国外气力式精密播种机技术现状及发展趋势[J].农机化研究,2008(12): 203-206.
[11]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
[12]钟陆明,陈学庚,温浩军,等.免耕播种机气吸式排种器影响因素的试验研究[J].农机化研究,2012,34(5):160-164.
[13]翟力欣,姬长英,丁启朔.Irshad Ali水田土壤蠕变的粘弹性计算[J].浙江农业学报,2010(4):509- 514.
[14]翟力欣, 姬长英, 丁启朔.流变态土壤切削试验用室内土槽与测试系统设计[J].农业机械学报, 2010,41(7):45-49.
[15]夏俊芳.基于ADAMS的精密播种机补种机构虚拟设计与分析[J].华中农业大学学报,2007,26(3): 419-422.
[16]刘飞, 赵满全.膜下播种机的设计及排种装置的室内性能试验[J].农业工程学报,2010,26(4):139 -142.
[17]白晓虎, 张祖立.基于的播种机仿形机构运动仿真[J].农机化研究,2009,31(3):40-42.
[18]包文育, 林静, 霍春明, 等.2BG-2 型免耕播种机横向运动稳定性分析[J].沈阳农业大学学报, 2009,40(3):370-372.
[19]王熙,张海玉,赵军,等.大豆播种机电液仿形机构研究[J].农机化研究, 2010,32(1)227-229.
[20]许剑平,谢宇峰,陈宝昌.国外气力式精密播种机技术现状及发展趋势[J].农机化研究,2008(12): 13-14.
Optimization Design for Virtual Prototype of Variable Rate Fertilization Based on Embedded Communication System
Ge Zhen1, Xiong Qiong1, Deng Minghua1, Wang Xiaozhi2, Bao Xiulan3
(1.School of Information Engineering,Wuhan Technology and Business University,Wuhan 430200, China; 2.Nanchang University,Nanchang 330031,China; 3.College of Engineering,Huazhong Agricultural University,Wuhan 430070, China)
Abstract:In order to achieve high speed operation of liquid fertilizer machine goal, it proposes a new method of variable control fertilization, the method mainly by the joint simulation of Pro/E and ADMAS mode of mechanical motion trajectory of the mechanism is verified,by using fuzzy control and two order differential algorithm to reduce the low fertilization amount of error, the realization of the use of PLC processing fertilization and communication data. In order to verify the validity of the method and reliability, application of 3D modeling design software Pro/E, the parts and assembly drawing mechanism model, through the type change save file to realize Pro/E and ADAMS data exchange, to establish the mechanism of virtual prototype and kinematics simulation in ADAMS, get the trajectory of the virtual prototype and fertilizing machine. Finally, through the optimization of the PLC embedded communication system, obtained the change curve of virtual prototype with the speed and the amount of fertilizer, the fertilizer before and after optimization accuracy and efficiency are compared, found that the fertilizing machine using the PLC embedded system optimized by comparison, the accuracy of fertilization got obvious improvement, and fertilizer efficiency is high,which provides the theory reference for the research on variable rate fertilization control.
Key words:variable rate fertilization; virtual prototype; two-order difference; embedded
文章编号:1003-188X(2016)03-0028-05
中图分类号:S224.2;S126
文献标识码:A
作者简介:葛蓁(1983-),女,河南商城人,讲师,硕士。通讯作者:汪小志(1981-),女,武汉人,讲师,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金项目:湖北省自然科学基金项目(2014CFB322)
收稿日期:2015-02-02
