双闭环控制采摘机器人机械手设计—基于PLC和CAN总线
2016-03-23陈晓龙
何 龙,陈晓龙
( 1.成都航空职业技术学院 航空维修工程系,成都 610100;2.西安电子科技大学 机电工程学院,西安 710071)
双闭环控制采摘机器人机械手设计—基于PLC和CAN总线
何龙1,陈晓龙2
( 1.成都航空职业技术学院 航空维修工程系,成都610100;2.西安电子科技大学 机电工程学院,西安710071)
摘要:采用双闭环控制系统,基于PLC运动控制器和CAN总线,提出了一种新的采摘机器人机械手关节分布式控制方案,并采用模块化思想设计了机器人关节电机控制系统、CAN模块及PLC控制器。采摘机器人机械手的关节采用谐波减速器进行调节,利用霍尔传感器和红外线传感器及光电编码器进行图像、转速和障碍物触碰的信号采集,采集信号利用A/D转换器将数据传输给PLC控制器。机械手的执行末端采用CAN总线控制,并利用变频器传递的通信信号,实现了末端执行器的并行控制,使多机械手处于最佳动作状态。最后,在双闭环控制方案的基础上加入了前馈控制环境,利用前馈控制环节可以实现对系统的实时控制,改善了系统的静态性能,实现了机械手对实际采摘位置的有效追踪。实验和仿真模拟表明:位移时间曲线平滑无突变,表明机器人在运行过程中平稳、无振动,机器人工作的可靠性较高,对路径的追踪精度较高。
关键词:采摘机器人;双闭环控制;谐波减速器;A/D转换器;CAN总线
0引言
农业机器人在现代化农业生产中的应用,不仅大幅度提高了劳动生产效率,也使劳动资源得到了合理配置,大大改善了农业生产环境,提高了农作物的产量。但是,由于农业环境的非结构性、果实对象分布不确定性和果实易损等特性,要求农业机器人具有开放式的控制系统和高度智能化的机械手结构。CAN总线按时间表分配和按需要分配,将其应用到了采摘机器人的末端执行器控制设计中,可以有效地提高控制效率和降低控制成本。
1机械手双闭环控制原理
采用双闭环控制系统可以有效地提高采摘机器人的控制效率和控制精度,而CAN是已经被认同的高性能和可靠性控制方案,已经被广泛地使用到了工业自动化、船舶和医疗设备等的自动化控制过程中。CAN总线是现场自动化控制研究领域的热点之一,是自动化领域的计算机局域网,为分布式控制及节点可靠实时数据的传输提供了强大的支持。PLC采摘机器人控制器主要由机械手控制末端、可编程控制器、变频器和调速电机组成,其框架结构如图1所示。整个控制过程采用双闭环控制方案,其控制结构如图2所示。
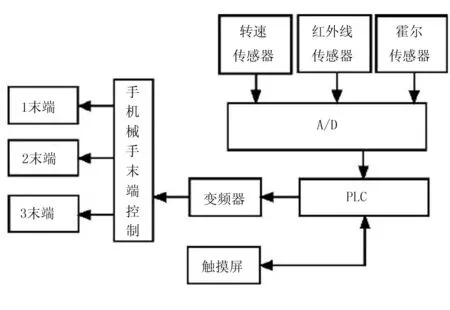
图1 基于PLC的采摘机械手控制器

图2 双闭环控制过程图
在常规转速传感器控制的基础上,以接触障碍物使霍尔传感器采集的力学信号为反馈值,将反馈值的误差E和误差变化率EC作为输入,使用模糊推理法对控制参数进行整定,从而满足了控制器对不同参数的要求,使控制对象具有较好的静态性能和动态性能。机械手关节的CAN总线控制流程如图3所示。

图3 机械手关节CAN总线控制
其控制过程主要包括系统和各功能模块的初始化、电流环调节的子程序、CAN通信的子程序及A/D 采样中断子程序等,利用CAN总线可以提高机器人控制的效率。
2末端执行器结构和伺服控制系统
在温室条件下,机器人主要靠数目视觉来进行路径划分和自主导航控制,其性能取决于图像分割和特征提取技术;而采摘精度主要受采摘机械手定位精度、采摘的速度及执行末端的控制。机械手末端执行器三维模型如图4所示。

图 4 采摘机械手末端执行器三维模型
为了改进手指刚性的适应性较差的问题,将夹持的两个手指安置在同一个平面内,另一个与它们的位置平行,增加了机械手的活动范围。机械手的电机控制机械结构如图5所示。

图5 机械手的电机控制机械结构
图5中,手指的控制采用欠平衡驱动原理,手指的并拢由腕部螺纹导杆控制。在复位弹簧的复位作用下,3根手指可以实现自主张开,在采摘时,利用上部的剪刀将果柄切断。为了提高控制的精度,使用光电编码器和谐波减速器对机械手进行控制,其结构如图6所示。

图6 驱动关节模型
驱动系统的减速器使用扁平式的谐波减速器,由4部分组成,包括输入钢轮、柔轮、波发生器和输出钢轮4部分。电机转速的采集主要使用光电编码器,通过采集2次脉冲计数来计算转速,计算公式为

(1)
其中,(k)表示电机转动角速度;T表示采样的周期。转速计算时,电路中经常会出现干扰,导致两次采样信号的间隔时间较短,在进行微分计算时干扰的噪声会被放大,导致计算得到的转速和实际转速相差较大。因此,需要通过滤波方法对速度的数值进行滤波。这里利用一阶低通数字滤波器对计算数据进行处理。连续时间的一阶低通滤波器的表达式为

(2)
其中,τc表示滤波的时间常数。

(3)


(4)

对于光电编码器转速数值的计算和保存,可以通过CAN总线进行数据传输。在主程序中,首先将CAN通信模块进行初始化,然后设定接收端,接收信息的寄存器相应的标位置为1;在中断程序时,读取速度信息,并将其存入相应的变量中。
3实验和仿真模拟测试
为了测试PLC和CAN总线在采摘机器人控制系统中的可靠性,对实验教学使用的六自由度机械手进行了改进,并以黄瓜采摘作为作业对象,对机械人的采摘性能进行了测试。教学用机器人结构如图7所示,其关节利用6个舵机进行控制,但是各关节缺少相应的反馈装置。

图7 教学用六自由度机械手
为此,对其进行了改进,利用双闭环控制原理,设计了PLC硬件电路和CAN总线控制器,改进后的机械手如图8所示。在不破坏机械臂机构的前提下,得到的机械手结构,其关节的控制电机使用直流电机,根据机械手的事物各种参数,建立如图9所示的机械手仿真模型。利用正运动仿真原理,输入期望的关节角度,通过仿真模拟计算,使机器人到达指定的末端位姿,模拟工具选择MatLab工具箱的Robotics Toolbox。通过仿真模拟计算,得到如图10的机器人机械手的运动轨迹。

图8 改进后的机械手

图9 机器人位姿仿真模型

图10 机器人机械手运动轨迹XOZ面投影
由仿真曲线可以看出:末端执行机构在水平方向在-800~800mm 范围内工作点密集,而该机器人的设计工作区间为58.25cm,可以满足机器人工作实际空间的需要。
为了提高采摘机械手的控制精度,加入了前馈控制环境,利用前馈控制环节可以实现对系统的实时控制,对给定不变性可以直接根据给定信号进行控制,改善了系统的静态性能,实现了机械手对实际采摘位置的有效追踪。通过实验和仿真模拟,最终得到了机械手的位置最终曲线,其结构如图11所示。
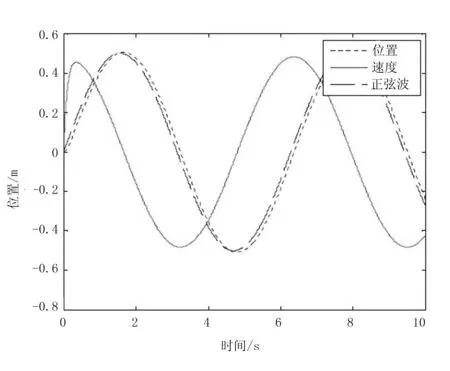
图11 位置追踪仿真结果曲线
图11中,追踪过程采用正弦波谐波减速器控制。由计算结果可以看出:位移时间曲线平滑无突变,表明机器人在运行过程中平稳,无振动。在谐波减速器的控制下,利用双闭环控制系统,机械手以较高的精度对实际位置进行了追踪,从而验证了基于PLC和CAN总线控制的采摘机械手工作的稳定性和可靠性。
4结论
1)提出了一种新的采摘机器人双闭环控制系统。该系统以PLC控制器和CAN总线作为控制工具,利用传感器完成了各种信号的采集,基于直流电机对执行末端进行控制,并使用谐波减速器对机械手的关节进行调节,有效地提高了采摘机器人的控制效率。
2)通过使用MatLab工具箱的Robotics Toolbox仿真工具对采摘机器人机械手的追踪性能进行了测试,并采用前置反馈调节的形式对追踪曲线进行了仿真模拟。由计算结果可以看出:机器人在运行过程中平稳、无振动,可靠性和控制精度均较高。
参考文献:
[1]李荣丽,贺利乐.煤炭采样机械臂的刚柔耦合动力学建模与仿真分析[J].机械设计,2013, 10(4):55-59.
[2]王鹏,朱龙英,崔振萍,等.轮履组合式环保机器人的设计与分析[J].机械科学与技术,2012, 1(1):44-45.
[3]薛金林,徐丽明.多功能农业机器人及其关键技术分析[J].安徽农业科学,2009,37(15):7201- 7203.
[4]张文增,马献德,黄源文,等.末端强力抓取的欠驱动拟人机械手[J].清华大学学报:自然科学版,2009,49(2):194-197.
[5]卢伟,宋爱国,蔡健荣,等.柑橘采摘机器人结构设计及运动学算法[J].东南大学学报:自然科学版,2010,41(1):95-100.
[6]杨文珍,梁春辉,陈文华,等.ZSTU拟人灵巧手设计与仿真[J].系统仿真学报,2011,23(12): 2617-2622.
[7]马贵飞,马履中,杨文亮.苹果采摘机器人机械手运动学分析与仿真[J].农机化研究,2010,32 (1):31-35.
[8]陆由斌,胡国栋,吕健,等.基于ADAMS的6自由度机器人的正解与逆解[J].机电产品开发与创新,2010,23(1):11-15.
[9]谢俊,匡俐辉,马履中,等.一种新型的串联中医推拿机械臂的运动学仿真[J].机械设计,2011, 23(2):20-25.
[10]陈文良,谢斌,宋正河,等.拖拉机电控液压动力转向系统的研究[J].农业工程学报,2006,22(10): 122-124.
[11]韩高楼.GPS 定位技术的优缺点[J].陕西建筑,2010(2):56-58.
[12]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6):15-17.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于Hough 变换的成熟草莓识别技术[J].农业机械学报,2007,38(3):106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009,3(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007,12(6):41-46.
[17]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006,27(9):1-5.
[18]李文见,姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版,2007(8):57-59.
[19]王仲民,戈新良,唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003,32(2):30-35.
[20]国刚,王毅.应用BP神经网络迭代进行手写体字母数字识别[J].人工智能及识别技术,2008,4(6):1459-1460.
[21]施少敏,马彦恒,陈建泗.基于BP神经网络迭代的数字识别方法[J].兵工自动化,2006,25(10):40-41.
[22]许颖泉.用神经网络迭代进行数字图像识别研究[J].应用科技,2008(12):59-60.
[23]纪晴,段培永,李连防,等.移动机器人全覆盖路径规划算法综述[J].山东建筑大学学报,2007,22(4):354-358.
[24]王俭,陈卫东,赵鹤鸣.移动机器人全覆盖路径规划优化方法[J].计算机工程,2005,31(22):162-163.
[25]吴修文,冯晓霞,孙康岭,等.农用机器人导航电子地图的研究[J].农业装备与车辆工程, 2010(3):40-42.
[26]朱向庆,陈志雄.采用GPS 和GPRS 的移动目标监控导航系统设计[J].计算机测量与控制, 2011, 19(5):1133-1136.
[27]李界家,陈浩,李颖.神经网络迭代算法解耦控制在中央空调系统中的应用[J].沈阳建筑大学学报,2012,28(1):182-186.
补充更正公告
兹于本刊2016年8月1日出版的《基于模糊控制的拖拉机路径跟踪仿真研究》,由于作者疏漏原因,经与作者沟通商量协调,特对如下文章内容进行如下补充更正:
1.作者添加:原作者序列为“石翔、马蓉、张长龙、梁锦;”更正为“石翔、李文春、马蓉、张长龙、梁锦”;原“Shi Xiang、Ma Rong、Zhang Changlong、Liang Jin”改为“Shi Xiang、Li Wenchun、Ma Rong、Zhang Changlong、Liang Jin”
2.(李文春)作者单位添加:新疆阿拉尔万达农机有限公司,新疆 阿拉尔843300;Xinjiang Wanda Modern Agricultural Equipment Limited by Share Co.Ltd., Alar 843300, China。
3.课题编号添加:原课题编号为“国家高技术研究发展计划项目(2013AA102307)”更正为“国家高技术研究发展计划项目(2013AA102307);新疆生产建设兵团南疆专项(2013BA048)”。
作者:石翔
2016年2月16日
Robot Manipulator Design for Double Closed Loop Control—Based on PLC and CAN BUS
He Long1, Chen Xiaolong2
(1.Department of Aeronautic Maintenance Engineering,Chengdu Aeronautic Vocational and Technical College, Chengdu 610100, China;2. School of Electro-Mechanical Engineering, Xidian University,Xi′an 710071, China)
Abstract:A new robot manipulator joint distributed control scheme is proposed based on the PLC motion controller and CAN BUS by using the double closed-loop control system. The robot joint motor control system CAN module and PLC controller are designed with the idea of modular design. The mechanical hand of the robot is used to adjust the joint of the robot hand. The signal acquisition is acquired by using the Holzer sensor and infrared sensor and the photoelectric encoder. The signal is acquired by the A/D converter and the signal is transmitted to the PLC controller. At the end of the manipulator,the CAN bus is used to control the communication signal,and the parallel control of the end effector is realized.At last,the feed forward control environment is added to the system based on the double closed-loop control scheme.The static performance of the system is improved. The results show that the robot is stable and reliable in operation.
Key words:robot manipulator; double closed-loop control; harmonic reducer; A/D converter; CAN bus
中图分类号:S225;TP241.3
文献标识码:A
文章编号:1003-188X(2016)12-0242-05
作者简介:何龙(1973-),男,四川遂宁人,副教授。通讯作者:陈晓龙(1976-),男,西安人,副教授,博士,(E-mail)dragon2015long@sina.com。
基金项目:四川省教育厅自然科学基金重点项目(14ZA0309)
收稿日期:2015-09-12