基于单片机和GPS定位的自主导航采摘机器人设计
2016-03-23葛君山
葛君山
(江苏海事职业技术学院 电气与自动化工程学院,南京 211170)
基于单片机和GPS定位的自主导航采摘机器人设计
葛君山
(江苏海事职业技术学院 电气与自动化工程学院,南京211170)
摘要:为了提高采摘机器人的智能化控制水平和自主导航能力,改善机器人的应用限制和使用性能,提出了一种基于单片机和GPS的采摘机器人自主导航方法,克服了采摘机器人导航方式的缺点,显著提高了导航定位的效率和精度。该方法利用GPS实时接收卫星发射的时间、经纬度和高度等信息,通过RS232发送给单片机;单片机对GPS发送数据进行处理,得到控制所需的时间和位置等信息,通过与机器人所处的位置进行比较,调整机器人的姿态,实现路径的智能化追踪和规划。在实验日光温室内对采摘机器人的自主导航性能进行了测试,结果表明:利用单片机和GPS定位可以较为精确地对采摘目标路径进行跟踪,可以使机器人沿着既定路径移动,控制的精度较高,误差较小。
关键词:采摘机器人;GPS定位;自主导航;路径规划;单片机
0引言
随着现代化农业科技水平的高速发展,市场对采摘机器人的需求越来越大,各种农业作业机器人也越来越受到关注。现在大部分的采摘机器人的导航方式采用电缆围出工作区域,使用涡流传感得到工作的路径和范围,在使用上受到了限制。GPS定位可靠性和精度较高,如果将其应用到采摘机器人导航系统的设计上,可以大大提高机器人导航的效率和精度,提高机器人的智能化控制水平,改善机器人的应用限制,对现代化农业机器人的研究具有重要的意义。
1自主导航采摘机器人结构设计
自主导航GPS定位系统主要由空间部分、地面部分和用户设备3部分组成。其中,空间部分主要是卫星星座,包括24颗卫星;地面部分主要是监控系统,包括主控站、注入站和监测站;用户设备为GPS信号接收机,可以接收计算出来的三维位置和速度,其原理如图1所示。卫星时钟和接收设备时钟之间存在钟差,所以必须使用4颗以上卫星才能确定接收天线的位置。采摘机器人一点P的三维坐标公式可以表示为
Pj=[(Xj-Xn)2+(Yj-Yn)2+(Zj-Zn)2]1/2+c·t
(1)
其中,(Xj,Yj,Zj)为卫星地心的瞬时坐标;(Xn,Yn,Zn)为接收机的地心坐标;t表示钟差;Pj(j=1,2,3,4)为伪距测量;c为光速。采摘机器人机械手的结构如图2所示。

图1 GPS定位原理原理图

图2 采摘机器人机械手结构
利用GPS定位系统设计了位置传感器和避障碍传感器。工作时,GPS定位系统可以使采摘机器人按照既定的路径行驶,且可有效地躲避障碍物。控制系统的硬件组成如图3所示。
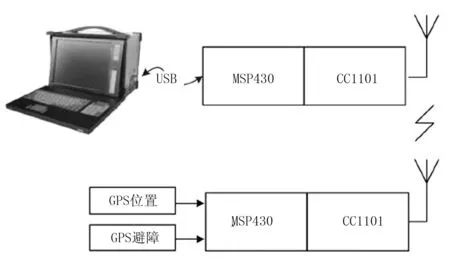
图3 采摘机器人定位硬件结构图
GPS无线数据传输部分为通信主站和从站,主要利用单片机来完成,使用MSP430控制器和射频芯片CC1101 组成的无线通信模块。其中,控制末端设计为皮带传动,其机械结构如图4所示。

1.电机 2.球笼式万向联轴器 3.轴承 4.直齿轮 5.皮带 6.车轮
为了提高传动的效率,降低结构的复杂程度,选用带传动作为执行末端的传动方式。其中,转向使用球笼式万向联轴器,可以执行单片机发出的转向信号,实现GPS的自主导航功能。
2采摘机器人导航系统
对于采摘机器人导航系统的设计,主要以单片机为控制核心,利用GPS模型实现采摘机器人的精确导航。GPS可以实时接收卫星发射的时间、经纬度和高度等信息,通过RS232发送给单片机;单片机根据GPS协议对卫星信息进行提取,得到所需的时间和位置等信息,通过与机器人所处位置进行比较,实现机器人运动方向的控制,达到精确导航的目的。总体设计框架如图5所示。
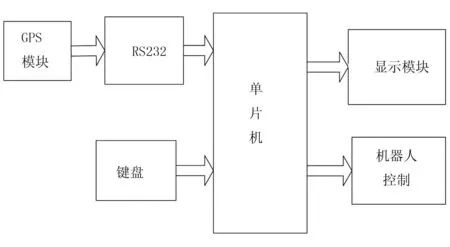
图5 单片机和GPS定位系统框图
由于卫星在使用过程中会实时地发送大量的数据,因此对其外部存储空间使用扩展SRAM,机器人的下一位置可以通过编程预先设定,也可以通过预留的键盘接口输入。由于GPS模块不能直接接入单片机,因此需要RS232转换电平后接入单片机,其通信原理如图6所示。

图6 串口通信原理图
图6中,接收机是整个系统的关键。目前,市场上的GPS接收模块的型号很多,功能和价格也有较大差异,但其基本构成一般包括天线、前置放大器、信号通道和中央处理器等。基本结构原理如图7所示。

图7 GPS接收模块结构图
当GPS接收器接收卫星信号后,对卫星信号进行追踪,并实现一系列的连续测距;然后对信号进行解调,将信号转为导航使用的电文。在整个过程中,需要保持数据信息获取的实时性,因此需要设计液晶显示电路,其位置结构如图8所示。

图8 液晶显示电路位置结构图
实时数据的显示使用LCD液晶显模块,由电源直接供电,并使用STC89C52单片机进行控制。LCD数据显示的流程如图9所示。
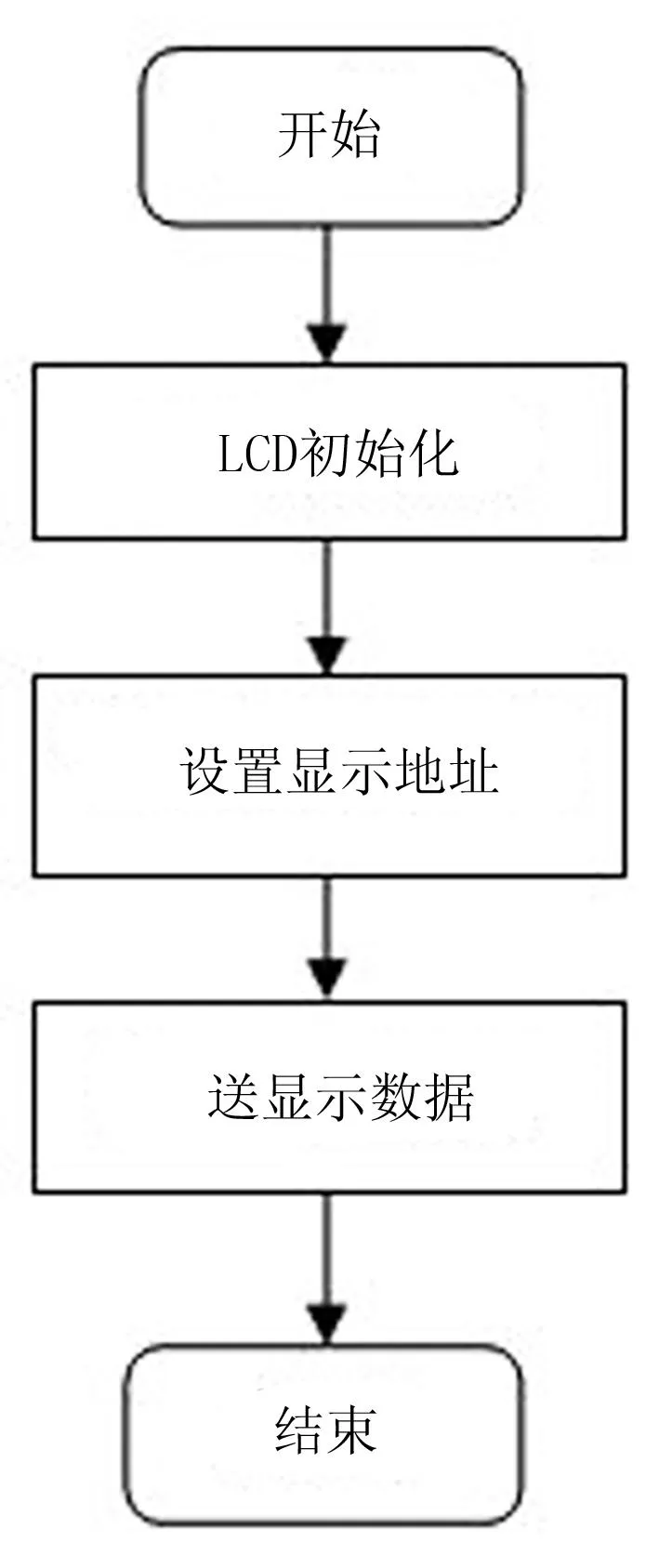
图9 实时显示模块流程图
图9中,通过对LCD的初始化,设置显示地址,然后在相应地址内显示发送的数据。本研究选择东-北-天作为导航坐标系,记为n系,将载体坐标记为b系。在n系中,重力加速度和地球自转角速度的矢量表达式为
gn=[00-g]T
(2)

(3)
其中,L表示地理纬度。在理想的条件下有
(4)
其中,Vi=[V1i,V2i,V3i]表示向量L在坐标系i中的投影,则

(5)
在定位时,利用坐标系中的速度和加速度数值进行组合,求解坐标系的转换矩阵,构造矩阵V=[g wieg×wie],于是可得
(6)
对于采摘机器人定位需要使用质心算法,其原理比较简单,定位原理如图10所示。

图10 采摘机器人质心定位示意图
图10中,4个圆为GPS观测信号,三角形为实际位置。根据质心定位算法,其质心的表达式可以写成

(7)
(8)
观测站位置(xi,yi)可以利用GPS测定,当观测站位置为N个时,质心位置的表达式为

(9)
通过对质心的定位,可以使机器人沿着既定的路径行驶,并且利用GPS定位可以有效地躲避障碍物,达到精确控制的目的,提高采摘作业的精确性。
3采摘机器人定位性能测试
为了验证单片机和GPS定位功能的可靠性,将黄瓜采摘机器人上装载了单片机和GPS定位系统,并将其在黄瓜采摘实验日光温室内进行性能测试。测试场地如图11所示。
利用GPS定位系统和单片机可以对采摘机器人的移动路径进行控制,使机器人沿着如图11所示的标线行驶,达到精确定位的目的,其采摘过程如图12所示。

图11 采摘机器人测试场地

图12 机器人自主导航测试
采摘对象为黄瓜采摘,为了使机器人能够沿着标线路径行驶,使用GPS对纯目标方位进行轨迹跟踪,通过轨迹跟踪得到了如图13所示的跟踪曲线。

图13 目标路径跟踪轨迹
由图13可以看出:利用单片机和GPS定位可以较为精确地对采摘目标路径进行跟踪,其跟踪误差如图14所示。由图14可以看出:使用GPS定位后的误差要明显小于不使用GPS定位,使用GPS后的误差分析图例如图15所示。
图15中,包括X方向和Y方向的误差。由图15可以看出:其定位误差都控制在100mm以内的范围,控制精度较高,可以使机器人沿着既定路径行驶,实现了采摘机器人的GPS定位功能。

图14 误差对比结果

图15 跟踪误差分析图例
4结论
本文提出了一种新的基于单片机和GPS定位方法的采摘机器人自主导航系统。该系统利用GPS实时的接收卫星发送信息,通过RS232传送给单片机,对数据进行处理,调整机器人的移动路径,从而实现了采摘机器人的自主导航能力。同时,该系统克服了导航定位的使用限制,显著提高了采摘机器人自主导航的效率和精度,改善了机器人的使用性能。
参考文献:
[1]李二超,李战明,李炜.基于神经网络的机器人关节转矩力控制研究[J].电气自动化,2011,33(1):23- 27.
[2]陈学东,孙翊,贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2005:74-98.
[3]王宇,范钦钰,赵亚东,等.基于仿生学的四足行走机构[J].电子设计工程,2011,19(17):27-30.
[4]阮鹏,俞志伟,张昊,等.基于ADAMS的仿壁虎机器人步态规划及仿真[J].机器人,2010,32(4):499- 504.
[5]俞志伟,李宏凯, 张晓峰,等.仿壁虎脚趾结构设计及粘附运动性能测试[J].机械工程学报,2011, 47(21): 7-13.
[6]李晓刚,刘晋浩.基于反演设计的码垛机器人神经网络自适应控制[J].包装工程,2012,33(1):80-85.
[7]薛胜雄,任启乐,陈正文,等.磁隙式爬壁机器人的研制[J].机械工程学报,2011,47(21): 37-42.
[8]李志海,付宜利,王树国.四轮驱动滑动吸盘爬壁机器人的动力学研究[J].机器人,2010,32(5):601- 607.
[9]钟灶生,薛方正,敬成林.分布式电源在仿人机器人控制系统中的应用[J].传感器与微系统,2011, 30(2):139-143.
[10]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[11]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[12]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于Hough变换的成熟草莓识别技术[J].农业机械学报,2007,38(3): 106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009,3(3):19-22.
[16]徐忠燕,简毅,任海洋.基于P87LPC768的小功率直流电动机调速系统[J].机械与电子,2009(7):46-47.
[17]赵庆波,赵德安,姬伟,等.采摘机器人视觉伺服控制系统设计[J].农业机械学报,2009,40(1):152-156.
[18]吴忠强,张晓霞,舒杰.柔性机器人基于自适应模糊动态面的实用稳定控制[J].中国机械工程,2012, 23(19):2297-2301.
[19]过希文,王群京,李国丽.基于动态面的机械臂轨迹跟踪神经网络自适应算法[J].系统仿真学报, 2011,23(11):2327-2332.
Design of Autonomous Navigation Picking Robot Based on MCU and GPS Positioning
Ge Junshan
(School of Electrical and Automation Engineering, Jiangsu Maritime Institute, Nanjing 211170, China)
Abstract:In order to improve the level of intelligent control and autonomous navigation ability of picking robot, the application limits and performance of robot are improved, and a new method is proposed based on single chip microcomputer and GPS. In this method, the time, latitude and longitude, and the height of the received satellite launched by GPS are transmitted to the SCM. The time and position of the GPS are processed by RS232. In the experiment, the autonomous navigation performance of the robot was tested, and the results show that the precision of the target path can be tracked by the single chip microcomputer and GPS positioning.
Key words:picking robot; GPS location; autonomous navigation; path planning; single chip microcomputer
中图分类号:S225;TP242
文献标识码:A
文章编号:1003-188X(2016)12-0237-05
作者简介:葛君山(1965-),男,江苏如东人,副教授,(E-mail)1965gjs@sina.cn。
基金项目:江苏省高校实验室研究会研究课题(GS2015YB22)
收稿日期:2015-09-14