不动形心线对逆转耕耘抛土性能的影响
2016-03-23刘永清宋志禹
刘永清,宋志禹
(1.无锡城市职业技术学院,江苏 无锡 214153;2.农业部南京农业机械化研究所,南京 210014)
不动形心线对逆转耕耘抛土性能的影响
刘永清1,宋志禹2
(1.无锡城市职业技术学院,江苏 无锡214153;2.农业部南京农业机械化研究所,南京210014)
摘要:在分析逆转旋耕工作的基础上,提出了不动形心线(Fixed Centroid Line-FCL)对逆转耕耘方式影响的思想。在旋耕刀片运动轨迹、逆转旋耕切削角度及逆转旋耕抛土后向性等方面,详细分析了FCL线的影响性质,建立了逆转旋耕被抛土垡瞬时初速度的方向模型,并对模型进行了仿真,为茶园耕作机械的设计提供了参考依据。主要结论:FCL线距刀辊轴的距离小于刀辊回转半径时,旋耕刀片才能够正常工作,且FCL线位于刀辊轴的上方为逆转耕耘方式,位于刀辊轴的下方为正转耕耘方式;在逆转旋耕方式下,当刀片运转到FCL线时,动态切土角最小;当FCL线位于刀辊轴之上,且同时又在地表之下时,逆转旋耕才具有抛土后向性。
关键词:逆转旋耕;不动形心线;抛土后向性
0引言
潜土逆转耕耘方式的驱动式旋转工作部件深入地表以下[1-3],旋转方向与拖拉机驱动轮旋转方向相反,从底部开始向上切削土壤,更多的土壤因张力作用而破裂,并将切削后的土壤抛向刀辊后方。
潜土逆转旋耕能否将被切土垡向后抛掷是决定其工作质量的关键[4]。如果所切土垡不能向后抛掷,工作部件前方就会产生壅土的现象,势必造成已耕土的重耕,而已耕土的重耕是潜土逆转旋耕阻力增大的主要原因之一[5-6]。
因此,潜土逆转旋耕机的抛土性能是影响其工作质量和耕作阻力的重要因素,研究逆转旋耕机的抛土性能与结构参数和工作参数的关系、设计较合理的参数是提高其工作质量、降低能耗的关键[7-8]。
对于正转旋耕,国内外学者已做了许多深入细致的工作[9-11],而对逆转旋耕研究的比较少,因此对逆转的一些性能尚没有完全掌握[12]。文献[4]和文献[13]建立了逆转旋耕的抛土模型,在此基础上对抛土率进行了研究;文献[5]建立了潜土逆转旋耕切削未耕土和刀片近地表时的抛土模型;文献[7]应用模糊动态聚类分析方法对潜土逆转旋耕抛土率进行定量研究;文献[8]以潜土逆转旋耕试验和微机序列图像处理技术为手段,对被抛土粒流时间序列图像进行了分析。
以上文献对逆转旋耕抛土性能进行了有益的探索和研究,但均侧重于抛土轨迹及抛土率等方面,对被抛土垡即将离开刀片的瞬时方向没有进行深入的探讨,尤其是没有涉及不动形心线的位置对抛土后向性的影响。本文的研究侧重于在逆转旋耕尤其是在潜土逆转旋耕方式下,土垡刚脱离正切面瞬时初速度的方向,并建立了瞬时初速度方向的模型,分析了土垡向后抛掷的条件及不动形心线位置对土垡抛掷后向性的影响,最后给出了仿真结果。
1旋耕刀片运动方程及不动形心线定义
1.1 旋耕刀片的绝对切土速度
逆转旋耕刀片在切削土壤的过程中,刀片旋转方向与机组前进方向相反,其运动方式是随机组以vm为前进速度的直线运动与以ω为角速度绕自身轴线转动的合成运动[14],如图1所示。
取坐标系如图1所示,x轴方向与机器前进方向一致,y轴方向铅直向上,逆时针方向的转角为正。α1为刀片入土角,α2为刀片出土角,h为耕深。由旋耕刀片的运动可知,刀片上任一点的运动方程为

(1)
式中ω—刀轴转动角速度(rad/s);
ωt—刀片在t时间内的转角(s);
θ—刀片刃角(rad);
vm—机器前进速度(m/s);
R(θ)—刀片上相对于刃口曲线极角θ的回转半径(m)。
式(1)对时间求导,得到旋耕刀片水平方向的切土速度vx和垂直方向的切土速度vy,则
vx=vm-ωR(θ)sinωt
vy=ωR(θ)cosωt
则刀片上任一点的绝对切土速度v为

设旋耕刀片正切面回转半径(及旋耕刀最大回转半径)为Rm,代入上式得

(2)
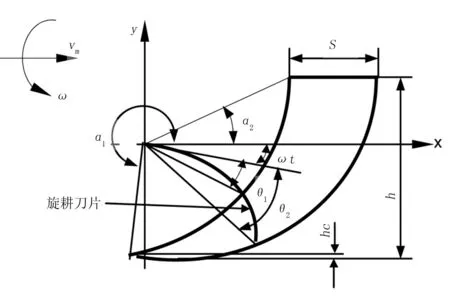
图1 潜土逆转旋耕刀片工作原理
1.2 不动心形线定义
旋耕刀片工作时,完成一种复合运动:刀片一边绕轴旋转,一边随机组前进。其中,绕轴的旋转运动是相对运动,机组前进运动是牵连运动,其绝对运动轨迹为余摆线。
相对运动和牵连运动的不同速度比称为速比,定义为

(3)
式(3)确定了刀片的运动轨迹。如果旋耕刀辊以角速度ω转动,并以速度vm前进,那么刀刃的端点A沿余摆线的运动轨迹如图2所示。取刀轴中心O为坐标原点,则OO1是刀轴在刀端由A点转动到A1点时机组的前进距离,同时刀端A点转动到了A1点。点A1的运动轨迹为

(4)
式(4)为时间t的参数方程,从方程中消去时间t,得到A1点的运动轨迹为

(5)
旋耕刀片上任意点的运动轨迹为

(6)
该点的运动轨迹由下面的比值确定,则

(7)
其中,ωri为旋耕刀片上任意点i的相对圆周速度。
将式(3)代入式(7)得

(8)
当λi=1,即ωri=vm,ri=Rm/λ=r时,r称为不动形心半径,如图2中的C—C线,定义为不动形心线(Fixed Centroid Line -FCL)。FCL线也是刀刃旋转瞬心的排列位置,与旋耕刀辊轴心线相距r。

图2 潜土逆转旋耕刀片运动轨迹
2FCL线对逆转耕耘的影响分析
2.1 FCL线对刀片运动轨迹的影响
FCL线C-C距沟底的高度为r+Rm,如图2所示,与刀辊旋转直径的比值为
(9)
由式(9)结合FCL线定义可知:
1)当r>Rm时,q>1,此时FCL线与刀辊轴的距离大于刀辊的回转半径,在旋耕刀片回转半径之外。在这种情况下,刀片的运动轨迹线为短幅摆线,如图3(a)所示,刀片无法正常工作。
2)当r=Rm时,q=1,此时FCL线距刀辊轴的距离与刀片回转半径相等。在这种情况下,刀片的运动轨迹线为摆线,如图3(b)所示,刀片的工作状态处于临界状态,但仍无法正常工作。
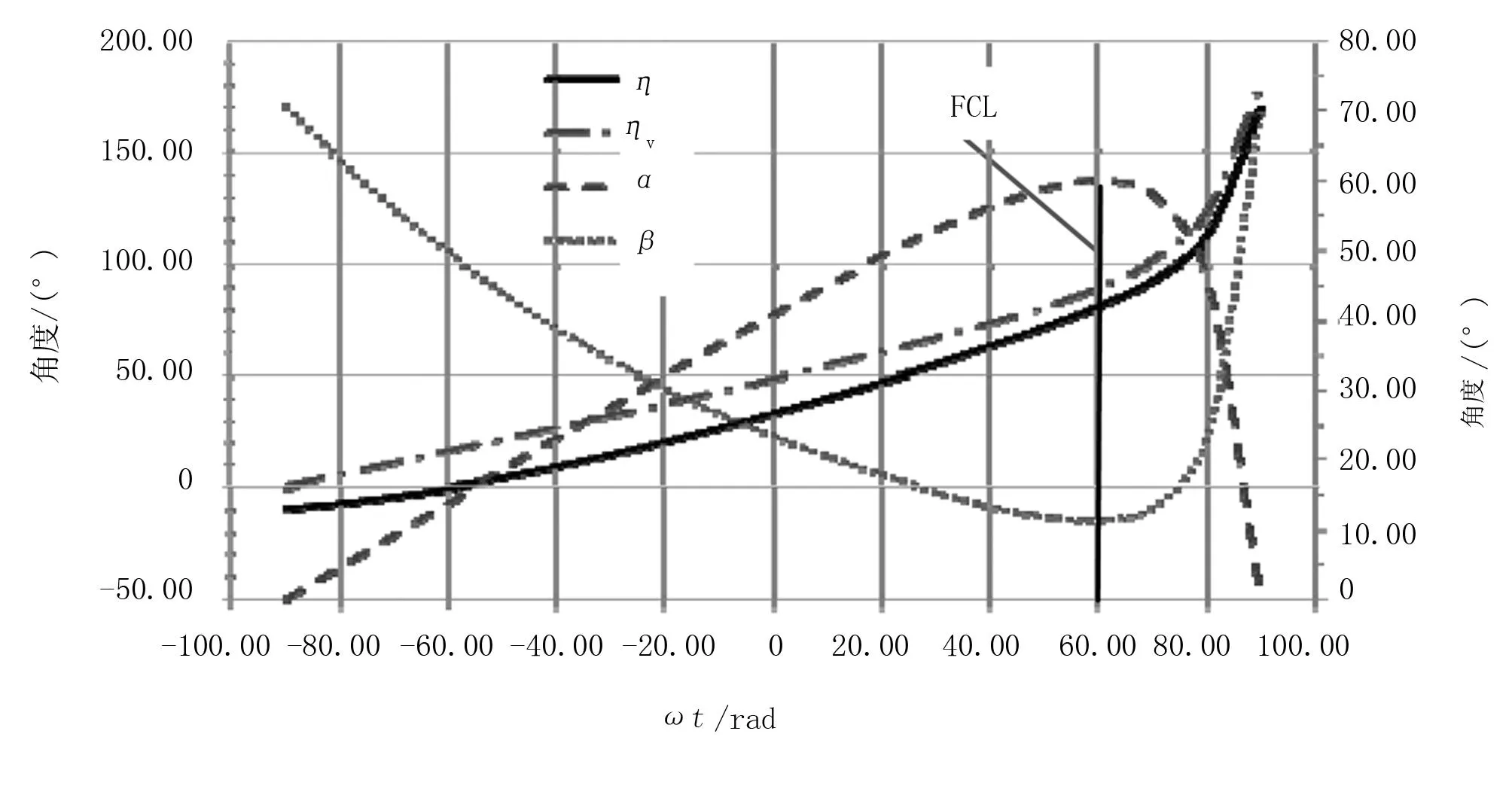
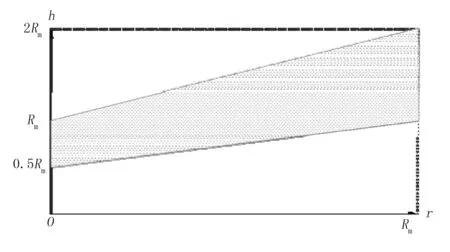
3)只有当r 图3 FCL线位置对刀片运动轨迹的影响(r>0) 在r定义中,假设刀辊旋转角速度ω的方向与机组前进方向一致时为正,相反时为负,则图3中的情况为逆转耕耘状况,此时r为正。当ω为负时,r也为负,即FCL的位置处于刀辊轴的下方。由式(9)可知: 1)当|r|>Rm时,q<0,此时FCL线与刀辊轴的距离大于刀辊的回转半径,情况类似于图3(a);但为正转耕耘方式,其刀片的运动轨迹线如图4(a)所示,刀片无法正常工作。 2)当|r|=Rm时,q=0,此时FCL线距刀辊轴的距离与刀片回转半径相等,刀片的运动轨迹线如图4(b)所示,刀片的工作状态处于临界状态,但是仍无法正常工作。 3)当|r| 图4 FCL线位置对刀片运动轨迹的影响(r<0) 由以上分析可知:FCL线对旋耕刀片运动轨迹以及能否正常工作有着非常大的影响。为了保证正常耕耘,应使|r| 对于逆转旋耕刀片正切面,用平行于侧切面的平面去截割正切面,则正切面任一截面上的角度参数如图5所示,各角度的名称定义如下[15]:δ0为静态切土角,正切刃口上某点静态轨迹(即圆周运动轨迹)切线与正切面内端面面之间的夹角;δ为动态切土角,正切刃口上某点的动态轨迹切线与正切面内端面之间的夹角;i为磨刃角;ζ0为静态隙角,正切刃上某点的静态轨迹切线与正切面外端面之间的夹角;ζ为动态隙角,正切刃上某点的动态轨迹切线与正切面的外端面之间的夹角;Δζ为变隙角;γ0为正切面安装角。 图5 正切面截面上的角度 逆转旋耕刀片正切刃(面)的工作过程如图6所示。取点k0时旋耕刀辊的转动角为θ=0,此时该点处的变隙角Δζ为零,动态隙角与静态隙角相等,即ζ=ζ0,其绝对速度(切削速度)是圆周速度与前进速度之和;随着角θ的增加,其切削速度减小。 (10) 图6 逆转旋耕刀片正切面的工作过程 (11) 因此,r的取值直接影响变隙角Δζ的最大值。在点Ac和Ac′处的切削速度的方向与前进速度方向垂直。 假定r 由图7得 (12) 当r+Rm>h=hA时,亦即FCL线位于地表的上方。假设有一土壤质子在A点被抛出,因为在旋耕刀片运动轨迹与FCL线的交点处的运动方向垂直于x轴,又因点A位于FCL线C-C的下方,故在A点旋耕刀片运动的绝对速度v与x轴的夹角,即ηA1<90°。因为ηA2≤ηA1,有ηA2<90°,因此在A点土块向刀轴前上方抛出,并落于刀轴前方或碰到旋耕机罩壳后再落于刀轴前方,造成壅土及已耕土壤再次切削,使旋耕刀片总的耕作功耗增加。 图7 不动形心线、耕深对抛土后向性影响 当r+Rm 由图7可以看出:增大ηB2角,可提高抛土后向性。根据式(12),角ηB2大小不仅与β有关,还与正切面安装角γ0、旋耕刀片转角ωt有关。对于给定的刀片,β角的大小由刀轴转动的角速度ω和机组前进速度vm来决定。其它角度不变,增大γ0角,可使角ηB2增加,虽然刀片抛土的后向性会有所提高,但碎土和覆盖性能也随之变差。γ0角增大,会使动态隙角ζ变小,减少切削阻力;但如果ζ过小,会造成刀背或正切面末端推挤或搓擦未耕土壤,使旋耕功耗增大。因此,在逆转耕耘方式中,不动形心线的位置,对抛土后向性有着很大的影响。 3土垡被抛出时瞬时方向模型的建立 为了建立土垡被抛出时的瞬时方向模型,建立如图8所示的坐标系。其中,角度α为正切面圆周速度ωRm与绝对速度v的夹角;η为va与x轴的夹角;其它符号意义如前文所述。由式(12)可得 η=ωt+γ0+β (13) 由图8可得 可推出 可得到 (14) 假设土垡的质量和在正切面上受到的正压力忽略不计,根据图8则有 (15) α角可由式(10)变换得到 (16) 至此,式(2)、式(15)、式(16)、式(14)和式(13),构成了土垡被抛出时的瞬时方向模型。 图8 土垡被抛出时的初速度va 4潜土逆转耕耘抛土后向性仿真 在MatLab v7软件平台上,利用以上建立的土垡被抛出时的瞬时方向模型,对潜土逆转旋耕抛土后向性进行仿真,以便更直观地进行分析。 图9是根据抛土后向性模型进行的仿真图。仿真条件:刀辊转速ω=1rad/s,机组前进速度vm=0.2m/s,正切面安装角γ0=25°,刀辊最大旋转半径Rm=0.3m。 图9 潜土逆转旋耕抛土后向性 图9中,符号ηv为旋耕刀辊最大旋转半径Rm处的绝对速度方向(与x轴的夹角)。ηv由下式确定,即 (17) 其它符号的含义同前文所述。图9中,左侧纵坐标为η和ηv的参考坐标,右侧纵坐标为α和β的参考坐标。 由图9可知:圆周速度ωRm与绝对速度v的夹角α(图中虚线)在刀辊由-π/2到+π/2运动时,首先由0逐渐增大,在FCL线r处达到最大值,与前文的分析相同。当刀辊继续向上旋转过了FCL线后,α`迅速减小,在+π/2处变为0,此时圆周速度与绝对速度在同一直线上,方向相反;β角(图中点线)的变化规律与α相反,首先由大到小,在FCL线r处达到最小,随后快速上升;ηv(图9中点划线)从-π/2到+π/2逐渐增加,在FCL线r处达到90°,即旋耕刀辊在FCL线r处的切削速度的方向与机组前进方向垂直,只有继续旋转超过了FCL线后,土垡被抛出的方向才有可能向后,结论与前文分析相同。η是被抛土垡的初时方向(图中实线),变化规律与ηv相似,因为η<ηv,所以在FCL线r处仍然小于90°,要使土垡向后抛出,刀辊必须转过FCL线一定的角度后才能实现,该角度为ηv与η之差,与FCL线的位置有关。图10为(ηv-η)与r/Rm在FCL线r处的仿真图。 图10 (ηv-η)-r/Rm仿真图 由以上分析,逆转旋耕的运动参数和安装角应设计在向后抛土的范围内,即η>90°;但是否抛土还与耕深有关。如果耕深h位于FCL线的下方,即(r+Rm)/h>1(见图7),则在旋耕刀片冲出地表即将抛土时,η<90°,此时土垡不会向后抛,因此要使土垡向后抛出,逆转旋耕必须采用潜土方式;但当(r+Rm)/h<0.5时,则在旋耕刀片在整个切削过程中均埋在地表以下,这样可能造成无法正常工作。 由以上分析,逆转耕耘正常工作并向后抛土必须采用潜土方式,且满足条件 (18) 图11是逆转旋耕耕深h与FCL线关系的仿真图。图中,阴影区域为潜土逆转耕耘正常工作并向后抛土的区域。逆转耕耘的工作参数和结构参数时应选择在该区域。图12是被抛土垡的初始方向η与耕深h、FCL线r的等值线图。图12中清楚地表明:η>90°时,耕深h与FCL线r的选择区域。图13是η与耕深h、FCL线r的曲面仿真图。从图13中可知:要使逆转旋耕被抛土垡向后抛出,应选择r在Rm/2左右,h的选择应满足h<2Rm,且在FCL线之上。 图11 h-r仿真图 图12 η与耕深h、不动形心线r等值线图 图13 η与耕深h、不动形心线r曲面图 5结论 1)在旋耕工作方式下,只有当FCL线距刀辊轴的距离小于刀辊回转半径时,旋耕刀片才能够正常工作,并且FCL位于刀辊轴上方时为逆转旋耕,位于刀辊轴下方时为正转旋耕方式。 2)在逆转旋耕方式下,当刀片运转到余摆线与FCL线相交处时,动态切土角和变隙角均达到最小,此时旋耕刀片绝对运动速度的方向与机组前进方向垂直。 3)FCL线对逆转旋耕抛土后向性有着重要影响。因为正转旋耕时FCL线位于刀辊轴的下方,因此正转旋耕不具有抛土后向性;只有当FCL线位于刀辊轴之上,且同时又在地表之下时,土垡才有可能向后抛出,此时耕耘方式为潜土逆转耕耘方式。 参考文献: [1]桑正中,王长兵.潜土逆转耕耘研究展望[J].农业工程学报,1994,10(3):88-92. [2]孔令德,张认成.旋耕刀研究的现状与展望[J].江苏理工大学学报[J]. 1997,18(3):6-13. [3]桑正中. 农业机械学(上册)[M].北京:中国农业机械出版社,1988. [4]陈翠英,石耀东.潜土逆转旋耕向后抛土率的计算[J].农业机械学报,1999,30(3):25-29. [5]刘孝民,桑正中.潜土逆转旋耕抛土研究[J].农业机械学报,1996,27( 4):40-44. [6]涉尺荣,川村登.深耕ロ-タリ耕ぅんに关する基础的研究 (4报) [J].农业机械学会志,1983,45(1): 43-48. [7]李伯全,陈翠英. 抛土率估算的模糊动态聚类分析方法[J]. 农业机械学报,2002,33(6):38-47. [8]李伯全,陈翠英,粱君秋. 潜土逆转旋耕理论模型验证及工作参数选择[J].江苏大学学报:自然科学版, 2005,26(3):203-205. [9]桥口公一,坂井纯. ロ-タリ耕ぅん抵抗6分力の测定用耕ぅん轴の试作ぉょびトルク波形の解析[J]. 农业机械学会志, 1985,47(3):311-320. [10]陈翠英. 旋耕机速度参数的合理选择[J].农业机械学报,1985,16(2): 30-37. [11]J.M. Beeny. Rotary Cultivation of Wet Rice Land-comparison of Blade Shape[J]. J. Agric. Eng. Res, 1973,18:249-251. [12]丁为民,王耀华,彭嵩植.正、反转旋耕不同耕作性能的比较[J]. 南京农业大学学报, 2003,26(3):106-109. [13]闫军朝 ,李洪昌 ,胡建平. 逆转旋耕抛土土量分布计算研究[J]. 农机化研究,2014,36(11):29-33. [14]刘永清,桑正中. 潜土逆转旋耕刀数学模型及参数优化[J].农业工程学报,2000(4):88-91. [15]丁为民,王耀华,彭嵩植. 反正旋耕刀正切面分析及参数选择[J]. 农业机械学报,2004,35(4):40-43. Abstract ID:1003-188X(2016)12-0012-EA Effect of Fixed Centroid Line on the Performance of Soil Throw Through Reverse Rotary Tillage Liu Yongqing1, Song Zhiyu2 (1.Wuxi City College of Vocational Technology,Wuxi 214153,China; 2.Nanjing Research Institute for Agricultural Mechanization, Ministry of Agriculture, Nanjing 210014, China) Abstract:Based on the analysis of reverse rotary work, the effect of the fixed centroid line (FCL) line effect on the reversal rotary work was proposed. A detailed analysis of the regulation of FCL effect was given in the reverse rotary blade moving track, reverse rotary cutting angle and reverse rotary tillage backward throw of soil, and a model for instantaneous velocity direction at the beginning of soil throwing of reverse rotary is established, and the model is simulated. It provides a reference basis for the design of tillage machine in tea garden. The main conclusion: The rotary tillage can work normally only when the FCL distance is less than the rotary shaft radius, and FCL which located above rotary shaft is for reverse rotary work mode, FCL which located below rotary shaft is for forward rotary work mode. In reverse rotary mode, when the blade running to FCL, dynamic cutting angle will be minimum. Only when FCL is located above reverse rotary shaft and located below the ground surface, it will has backward throw of soil. Key words:reverse rotary tillage;fixed centroid line;backward throw of soil 中图分类号:S222.3 文献标识码:A 文章编号:1003-188X(2016)12-0012-06 作者简介:刘永清(1969-),男,河南安阳人,工程师,博士,(E-mail)liu.yq163@163.com。通讯作者:宋志禹(1984-),男,山东威海人,助理研究员,(E-mail)songzy1984@163.com。 基金项目:公益性行业(农业)科研专项(201303012) 收稿日期:2015-12-06


2.2 FCL线对逆转旋耕切削角度的影响






2.3 FCL线对逆转旋耕抛土后向性影响