图像畸变校正算法在测量中的应用
2016-03-22河南省计量科学研究院刘宾武郑开放
河南省计量科学研究院 刘宾武 张 燕 郑开放
图像畸变校正算法在测量中的应用
河南省计量科学研究院刘宾武张燕郑开放
【摘要】工业用镜头对物体进行取像时,物体会产生畸变失真。畸变对物体参数的后续测量产生影响,所以必须对畸变图像进行校正。本文通过对已有图像畸变校正算法的介绍比较,采用了一种不拘泥于具体镜头,适用性强的校正算法。此算法首先根据畸变图像产生的原理对径向畸变建立模型,算法第一步使用亚像素边缘算法对失真图像定位边缘、提取边缘点;第二部用最小二乘法对提取的边缘点进行线性拟合,得到所有点与标准点的总平方和;第三步使用LM算法对第二步得到的总平方和进行优化参数处理,得到最优参数;第四步将最优参数带入反校正模型,最终还原图像。还原后的图像与标准图像相比,校正结果的精度可以达到1个像素的最大误差。
【关键词】广角镜头;径向失真;亚像素;LM算法
0 引言
在工业测量领域中,电子元器件针脚距离的自动化检测是一大应用。针脚距离的自动化检测首先要求对针脚进行取像,广角镜头由于其价格低、视场大而应用广泛。由于成像系统和特定的生产环境造成的影响,拍摄后的图像产生畸变,不利于后续处理。广角镜头取像的特点:镜头焦距距离拍摄物体距离越近,失真越大;距离越远,失真越小。但远距离的拍摄会收到各种光源的影响,造成拍摄不清。失真类型为径向失真。
广角镜头(工业使用)所造成图像坐标点位置的像素误差大致在2-12个像素之间,如宾得(PENTAX)公司生产的焦距为8mm的工业镜头,其在近距离拍摄图像时会产生3个像素左右的失真。图像的畸变校正可以从两方面考虑,硬件的改进和软件的优化。一般来说,硬件改进的成本较高,实现起来困难。但软件不同,软件改进起来容易且容易实现,最重要的是软件可以降低企业的成本,利于推广。本文首先对现有校正模型算法进行分析,然后采用了一种径向畸变图像校正模型来校正图像以及完成软件实现,为工业中的自动化测量提供参考,此算法的特点:通用性强,不限制于具体镜头。
1 图像畸变算法介绍
目前最常用的畸变校正算法主要有模板法和基于参数已知——等效球面法。
模板法原理:首先做好一个理想的模板,对模板取像,然后对理想模板和成像模板上标定对应点,为对应点建立数学畸变模型,计算出模型的各个参数,最后将完整的畸变图像代入数学模型,完成图像还原。模板法包括棋盘格模板法[1]和同心圆模板法[2]。模板法优点是精度高,但算法需要制作理想模板,数学计算量大,实时性低。
基于参数已知——等效球面法[3]原理:采用等效球面模型来模拟图像畸变,需要提取镜头的水平角度、垂直角度以及焦距的大小,利用上述参数可以完成图像的畸变校正。计算量小。其优点是无需对各种镜头提取模板,只用知道镜头的水平角度、垂直角度以及焦距,就可以还原畸变的图像,算法简易实现。但在确定其镜头参数时存在误差,导致算法精度不高。
基于上述两种畸变校正模型优缺点考虑,下面介绍一种通用性强、不限制于具体镜头的畸变校正模型系统。通过实验结果证明,此校正算法的精度为一个像素。
2 径向畸变校正系统的建立
2.1算法设计
2.1.1建立径向畸变校正模型
基于广角镜头,建立径向失真模型[4]。令标准图像(图1)的边缘点的坐标为(x,y),畸变图像(图2)中的对应点(边缘红点)的坐标为(),令图像的长、高为W和N,令xc=W/2,yc=N/2,中心点坐标为(xc,yc),公式如下:

图1 标准图

图2 畸变图

其中L(r)是关于半径r的多项式。
k0,k1,k2,...是模型参数。关于L(r)最高次的确定,我们选取偶数项(k0,k2,k4)作为畸变模型参数,实验结果表明,选取偶数项比选取奇数项(k1,k3)建立的模型效果更好。多项式的最高次数越高,校正效果越精确,但会导致计算量增加。实验表明,选取就可以达到要求的精度,计算量低。
2.1.2算法步骤
(1)用亚像素[5]边缘算法对畸变图像进行边缘定位,提取边缘点;
(2)将提取的边缘点集失真模型公式(1)中,对参数k做初始化,得到校正点集;
(3)对校正点集做直线拟合处理,得到直线拟合方程L;
(4)将校正点集到直线L的距离的总平方和作为误差,初次的误差当做初始值;
(5)使用LM参数算法优化参数k,得到最优k;
(6)将k代入反校正算法模型,还原图像(如图3所示)。

图3 算法流程图
2.2软件界面设计(如图4所示)
2.3界面部分按钮的简介
Image:打开图片;亚像素检测:对选取的畸变图像进行边缘取点;求解畸变参数:将取到的边缘点代入校正模型,进行参数k最优化处理;重构图像:将参数k代入反校正模型,还原图像。

图4 软件概览图
3 实验结果与分析
本文从定性和定量两方面对实验结果进行分析。
3.1 定性分析(如图5所示)
3.2定量分析
实验图像的选取:不同程度畸变的四张图像,通过软件运行还原图像,以均方误差E和最大距离d两个参数作为实验结果。
3.2.1实验图片的选取
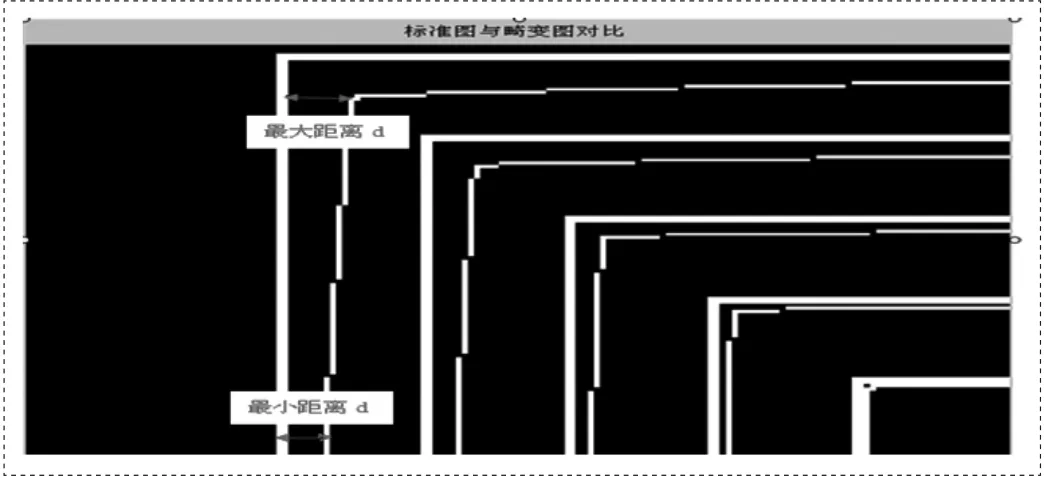
图6 标准图与畸变图的对比图
如图6所示,实验图像选取四张畸变程度大小不同的图像,最大距离d与最小距离d描述标准图和畸变图,如表1所示,以像素为单位:

表1 畸变程度不同的四幅图
3.2.2 求解最优参数k

图7 边缘点示例图
如图7所示,对畸变图像进行亚像素边缘定位取点,每条边选取200个点,总共800个点带入畸变校正算法模型,运行算法得到最优参数k。如表2所示,系数k保留小数点8位:

表2 最优参数
3.2.3 定量分析
均方误差E:将校正后的图像的左边缘选取的380个点与对应的标准图像的380个点进行求均方误差运算,由于本实验为测量两直线的距离,所以只计算x水平方向的均方误差E。公式如下:

说明:标准图像的最外边缘矩形的左上角的点坐标为(128,48),将校正后的图像的最外边缘矩形边的坐标与标准图像进行计算。
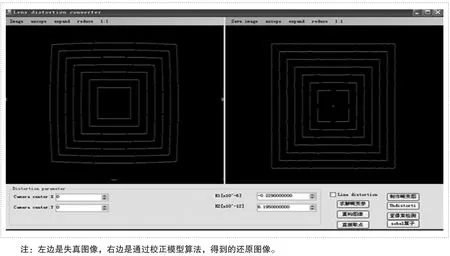
图5 实验结果图
四幅图的均方误差与最大最小距离如表3所示,单位(像素),小数点保留到后六位:
图8所示是四幅还原图像与标准图像的对比分析图。

表3 校正结果

图8 效果对比图
说明:图8是我们以标准图最左边缘的像素坐标与四幅校正图最左边线进行对比的实验结果图(y坐标不变,x坐标有误差),标准图像外边缘上角坐标(128,48),下角坐标为(128,432)。从图8上看出还原后的图像与标准图像的像素位置相比,x坐标最小误差为0.05个像素,最大误差为0.53个像素,还原图像精度为1个像素。
4 总结
上述实验结果表明,此畸变校正系统精度较高。相比于现有其他校正算法,此算法具有不拘泥于具体镜头、适用性广的特点,不足之处在于算法运行时间较长,需要继续优化。此算法可应用到廉价的广角镜头中代替昂贵的镜头,降低企业成本。在工业自动化测量中,此算法可为工业中物体参数的测量,如元器件针脚距离的自动测量提供参考。
参考文献
[1]汤旭涛.广角摄像头视频图像实时校正系统设计[硕士学位论文].上海:华东师范大学,2009.
[2]盛琳阳.基于圆序列的多帧对齐和径向畸变校正算法[J].计算机应用与工程,2006(15).
[3]王伟,钟堰利.广角镜头图像畸变校正系统的研究[J].光学技术,2004(4).
[4]王茂义,王睿.一种校正图像边缘的改进算法[J].仪器科学与光电技术,2006.
[5]李庆利.一种基于多项式插值改进的亚像素细分算法[J].2008.
[6]杨文茂,李全英.空间解析几何[M].1997.
