一种双轴姿态稳定平台的设计与实现
2016-03-17吕天慧蔡志娟朱如意陈灿辉
吕天慧, 蔡志娟, 朱 红, 朱如意, 陈灿辉
(1.中国运载火箭技术研究院 研究与发展中心, 北京 100076;2.中国运载火箭技术研究院 第十八研究所, 北京 100076)
一种双轴姿态稳定平台的设计与实现
吕天慧1, 蔡志娟2, 朱红1, 朱如意1, 陈灿辉1
(1.中国运载火箭技术研究院 研究与发展中心, 北京100076;2.中国运载火箭技术研究院 第十八研究所, 北京100076)
摘要:机载姿态稳定平台可隔离载体角运动、精确跟踪当地水平面,因此在航空遥感领域中有着广泛的应用前景;通过以微惯性传感器作为主要测量元件,以步进电机作为执行机构,构建了一种双轴姿态稳定平台,进行姿态的闭环控制,克服了传统陀螺稳定平台造价昂贵、设计复杂的特点;试验测试结果表明,该平台可以实现对当地水平面的精确跟踪。
关键词:微惯性器件;双轴姿态稳定平台;遥感
0引言
遥感载荷的理想工作条件是载机运动规律精确已知,但实际飞行时,受设备性能、气流以及任务所要求机动性能的影响,载机工作环境往往较为复杂,这对载荷的正常工作产生了重要影响。而姿态稳定平台则是一种能隔离外界扰动,使载荷保持空间指向相对稳定性的结构装置。利用姿态稳定平台可以显著提高载荷工作效率,降低其对载机、天气等条件的依赖,减少后处理工作量,并拓展载荷的工作范围[1-2]。
传统的姿态稳定平台通常为陀螺稳定平台,需要采用如挠性陀螺和力矩电机等造价昂贵的设备,同时机械机构复杂、对器件安装要求也较高,使其应用范围限制在高端场合。本文所述的双轴稳定平台采用DSP芯片作为核心处理单元,以微惯性器件作为主要测量元件,以步进电机作为执行机构,能够实现载荷实时跟踪当地水平,具有规模小、成本低、实现性好、轻便快捷等优点,具有较强推广应用价值。
1平台结构及原理
1.1平台结构
姿态稳定平台主要由机械结构和电气设备组成。机械部分采用双框架形式,外侧为俯仰框架,内侧为横滚框架。结构设计时采用对称形式以减少质量偏心带来的静不平衡力矩等影响同时减少伺服电机选型及控制难度;应保证框架轴线间的垂直度和同心度的加工精度要求;框架轴与框架间通过精密轴承相连,并加入轴承盖以限制轴承在径向方向上的滑动;遥感载荷安装到平台台体法兰盘中心位置上,保证其视轴指向沿竖直方向。平台机械结构如图1所示。
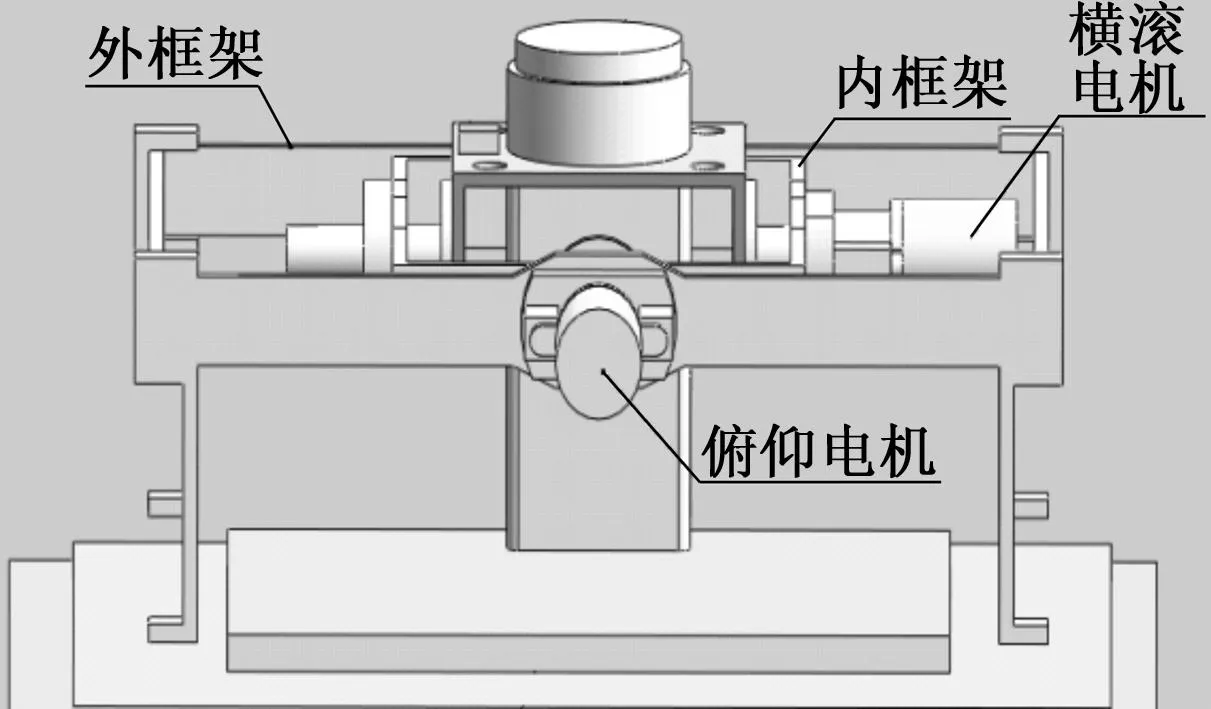
图1 平台双框架机械结构示意图
电气部分主要由MEMS陀螺仪、MEMS加速度计、GPS接收机及天线、绝对位置式光电码盘、步进电机、电路板(采集、控制及驱动电路等)及相应线缆组成。加速度计和陀螺仪安装在平台法兰盘上,对应敏感轴方向与双框架轴线和载荷视轴方向一致;两组步进电机和光电码盘分别安装在平台俯仰轴和横滚轴上。
1.2工作原理
平台工作原理主要分为初始对准阶段和水平姿态稳定阶段。初始对准阶段主要通过加速度计敏感重力投影分量,确定平台偏离水平面的角度并以此作为输入量,驱动步进电机旋转使平台调整至水平。初始对准阶段完成后,平台进入水平姿态稳定阶段,该阶段以陀螺仪、加速度计及GPS构成姿态测量系统,该系统与载机固联,从而通过姿态测量系统实时敏感框架台体扰动时偏离水平面的角度,再以该偏离角度作为输入条件,换算出驱动步进电机的控制量,将平台拉回水平位置,实现平台对当地水平的实时精确跟踪。平台功能流程如图2所示。
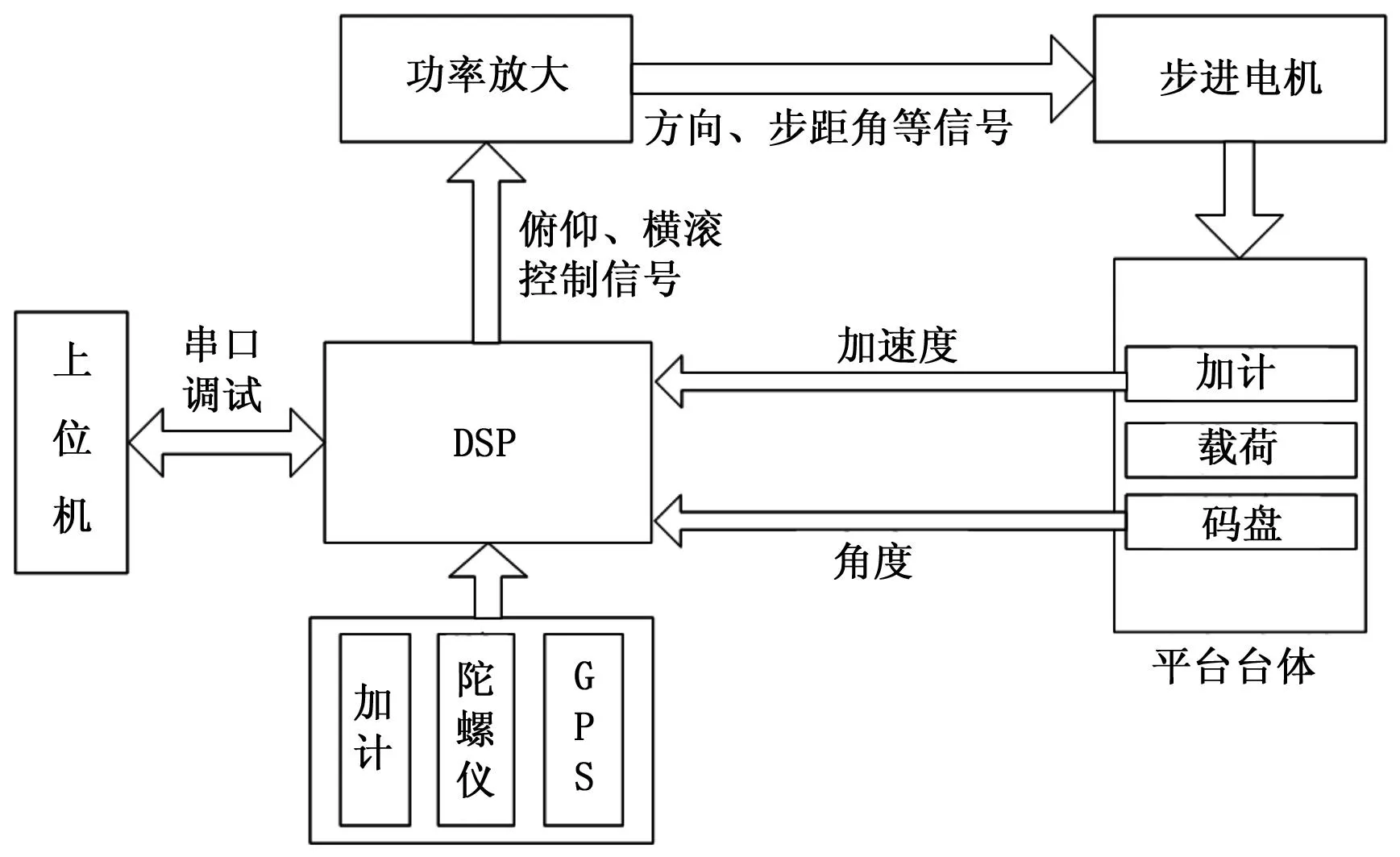
图2 平台功能流程框图
2硬件电路设计
平台硬件电路所用加计和陀螺均选择MEMS元件,型号分别为ADXL320(双轴)和LCG50(单轴)。
核心处理芯片选用DSP2812,它是TI公司一款高性能处理器芯片,其系统响应速度快,片上外围资源丰富,集成度高,内置GPIO、QEP、ePWM等接口,尤其适用于工业伺服驱动控制,因此在相关领域得到了广泛的应用。
数字处理芯片DSP2812通过ADC接口采集陀螺和加计信号,通过SCI接口接收GPS信息,然后捷联解算出载机的姿态信息,选择步进电机作为伺服执行机构,步进电机转过角度反馈元件为光电码盘。DSP2812处理器典型外围电路如图3所示[3]。
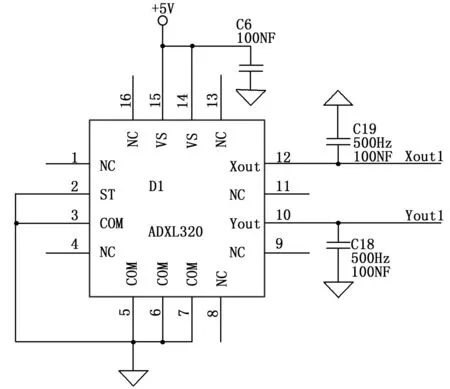
图3 加速度计采集电路图
图4 核心信息处理器电路框图
步进电机驱动电路采用步进电机专用功率驱动芯片TA8435来实现。TA8435是单片集成式正弦细分驱动芯片,可以用来驱动二相四线或四相六线步进电机,最大可以实现八细分。其内部集成了功率放大、逆变桥等电路,具有体积小、功耗低、可靠性高、设计简单等优点。通过TA8345的EN管脚控制步进电机的使能;通过CLK1/CLK2管脚控制发送给步进电机的脉冲数;通过CW/CCW管脚控制步进电机的转向;通过M1,M2控制步进电机细分方式。
具体设计时,步进电机响应频率及步距角选取,应根据载机实际飞行中的姿态变化动态特性进行。本平台选用二相四线步进电机,步距角0.5°,相关驱动电路如图4所示。CPU通过GPIO口并经过光耦隔离后输出相应的起停、脉冲、方向、细分数等信号给TA8435芯片,TA8435直接与电机相应的相线端相连以驱动电机运转。电机驱动电路如图5所示。
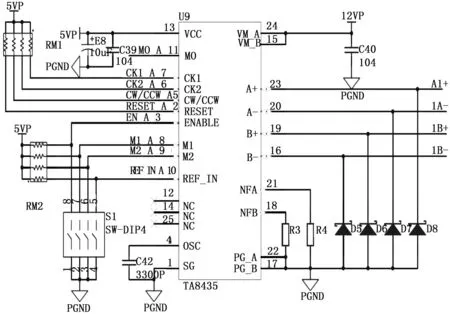
图5 电机驱动电路图
3软件设计
软件主程序包括系统初始化、开启中断、ADC采集测量数据、均值及低通滤波、初始调平指令计算及驱动信号输出、SCI接收数据、导航解算及Kalman滤波、稳定跟踪指令计算及驱动信号输出。主程序如图6所示。

图6 主程序流程图
初始调平利用加计信息进行闭环控制。通过定时器中断触发ADC采集加计数据,采集后经过均值滤波、低通滤波并进行数据补偿后,参与调平控制。平台在两个轴线方向偏离水平的角度计算公式如下:
α=arcsin(fy/g)
根据上述偏转角度,驱动电机带动框架旋转至当地水平。加计调平程序完成后,置相应标志位为1,系统便进入水平跟踪程序运行阶段。该阶段主要以姿态测量系统及光电码盘的测量信息进行闭环控制。由于双框架通道近似解耦,所以各自独立采用相同的控制率,跟踪回路控制框图如7所示[4]。具体控制时,通过定时中断,对姿态测量系统信息进行捷联解算,然后将计算出的姿态变化量作为输入,以光电码盘信号作为输出量,采用PID(比例、积分、微分)算法,进行步进电机的闭环驱动控制。
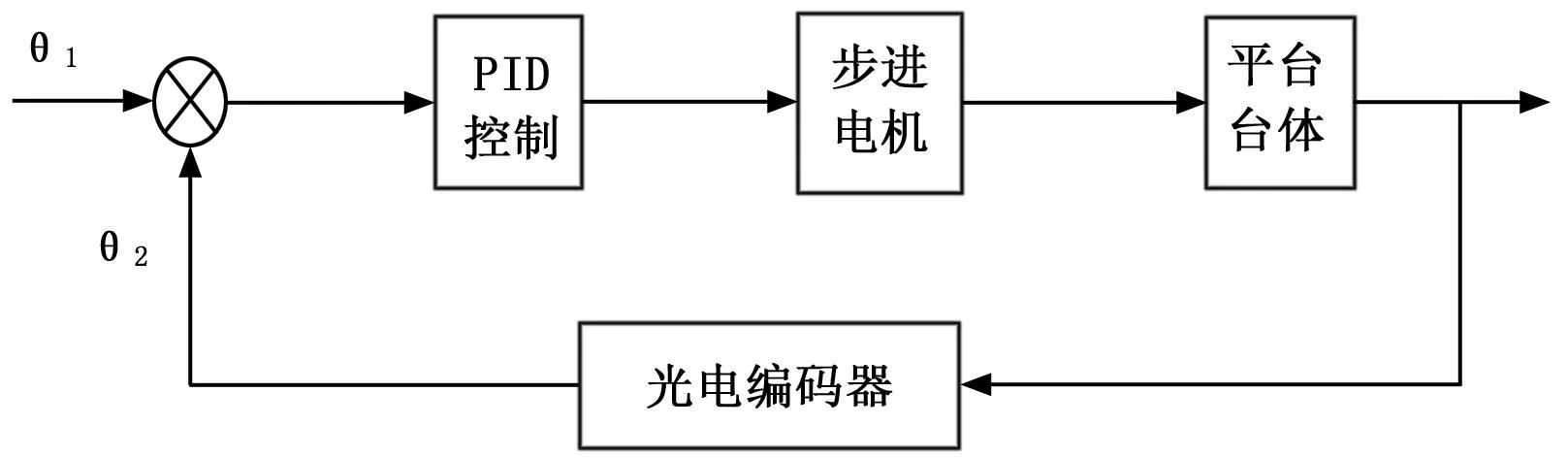
图7 水平跟踪控制框图
步进电机运行时的步距数、步进方向等主要参数通过如下方法确定:
N1=floor(fabs(θ/δ1)+0.5)
N2=floor(fabs(γ/δ2)+0.5)
S1=-sign(θ)
S2=-sign(γ)

δ1=0.36/M1M2
其中:θ、γ分别为俯仰轴和横滚轴的实时偏转角度;N1、N2分别为俯仰轴电机和横滚轴电机控制脉冲输入数;δ1、δ2分别为可变细分数;S1、S2分别为俯仰轴电机和横滚轴电机方向控制电平(高电平时,电机顺时针转);E1、E2为分别为俯仰轴电机和横滚轴电机使能控制电平(低电平使能)。
由于载机实际飞行中,姿态偏差可能为小于某一阈值的小角度,同时由于姿态信息中叠加的噪声也可能带来小角度扰动,这时平台台体再做频繁的纠偏控制动作没有太大意义。因此程序中设置最小动作步数阈值,如果某时刻解算出的运行步数小于最小动作步数阈值,则步进电机保持当前位置不动作,但需要将该电机不动作而带来的角度偏差叠加到下一控制周期的输入量内,以防止累计性误差。
采用Matlab软件进行PID控制闭环建模,并调整优化相应的PID控制率参数,仿真结果见图8,表明该控制器使系统具有较快的调节时间且无超调。

图8 稳定回路仿真结果
4试验结果与分析
通过摇摆振动台模拟机载飞行环境,在摇摆台上对双轴姿态稳定平台进行了振幅为10°频率为1 Hz的摇摆试验,以横滚框架控制为例,横滚轴上光电码盘的输出信号如图9所示。
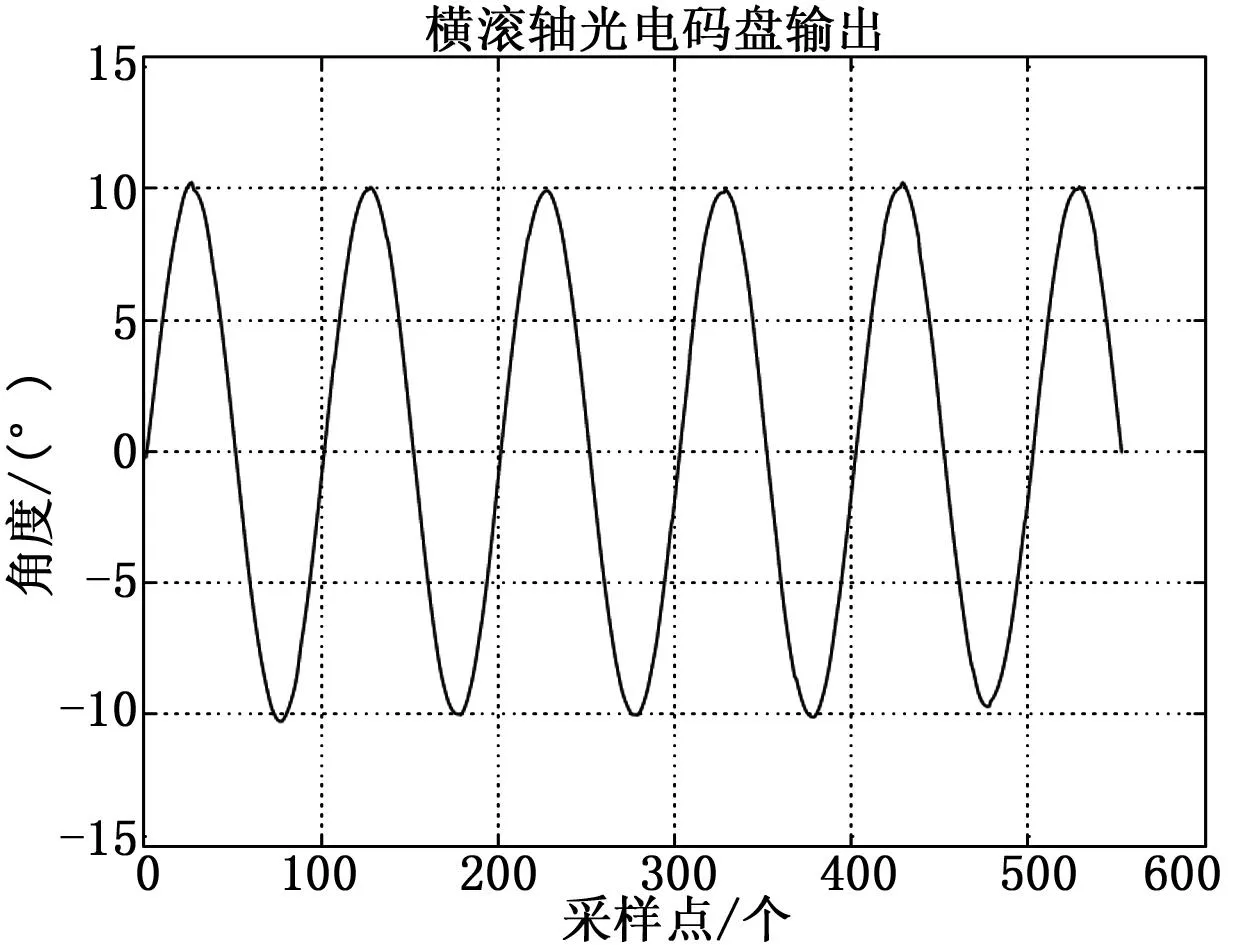
图9 摇摆台试验
试验结果表明,姿态稳定平台在模拟摇摆情况下,能够准确的跟踪当地水平。
5结论
本文研制的双轴姿态稳定平台可以隔离飞机角运动,实现遥感载荷的跟踪当地水平功能。该系统具有成本低、体积小、易实现性、方便快捷等优势。测试分析结果表明系统具有较好的动态性能,能够满足实际使用要求。
参考文献:
[1] 陈建.机载陀螺稳定平台自动控制系统研究[J].飞行试验, 2001, 17(3): 25-30.
[2] 谷素梅. 小型光学惯性稳像跟踪系统的研究[J]. 北京理工大学学报, 1991, 11(4): 32-36.
[3] 刘志广. 基于TM S320F2812的机载稳定跟踪平台伺服控制器设计[J]. 广西轻工业大学学报, 2008, 5(3): 31-32.
[4] 胡勇. 姿态随动稳定跟踪平台的控制算法与仿真[J]. 兵工自动化, 2007, 26(2): 65-67.
Design and Implementation of Two-Axis Attitude Stabilized Platform
Lv Tianhui1, Cai Zhijuan2, Zhu Hong1, Zhu Ruyi1, Chen Canhui1
(1.China Academy of Launch Vehicle Technology R&D Center, Beijing100076, China;2.18th Institute, CALVT, Beijing100076, China)
Abstract:Attitude stabilized platform is widely used in aero remote sensing field because it can insulates turbulence in the environment and follows the local level precisely. This paper gives a two-axis attitude stabilized platform which chooses micro inertial device as the transducer, uses stepper motor to implement the servo control and realizes the attitude closed-loop control, and it can overcome the expensive and complex characteristics in the design of traditional gyro stabilized platform. Test shows that the platform can help remote sensing payloads follow the local level well.
Keywords:micro-inertial devices; two-axis attitude stabilized platform; aero remote sensing
文章编号:1671-4598(2016)02-0213-03
DOI:10.16526/j.cnki.11-4762/tp.2016.02.059
中图分类号:TH703
文献标识码:A
作者简介:吕天慧(1984-),男,吉林榆树人,硕士研究生,工程师,主要从事电气设计、工作。
收稿日期:2015-08-17;修回日期:2015-10-07。
