大空间建筑火源的精确定位方法
2016-03-17王慧琴秦立科
毛 颖 王慧琴,2 卢 英,2 秦立科
1(西安建筑科技大学信息与控制工程学院 陕西 西安 710055)
2(西安建筑科技大学管理学院 陕西 西安 710055)
大空间建筑火源的精确定位方法
毛颖1王慧琴1,2卢英1,2秦立科1
1(西安建筑科技大学信息与控制工程学院陕西 西安 710055)
2(西安建筑科技大学管理学院陕西 西安 710055)
摘要针对大空间建筑火源定位精度低和实时性差的问题,提出一种基于火焰图像熵值加速鲁棒性特征SURF(Speeded Up Robust Features)的改进遗传算法求解框架应用在大空间建筑火源定位中。在良好的火源探测下,首先用SURF算法提取火焰特征点,引入特征点熵值来减少误匹配,得到较好的匹配点对,进一步求解摄像机参数。通过改进选择、交叉、变异算子设计大空间建筑火源定位中摄像机标定的遗传算法,最终获得火源三维信息。实验结果表明,提出的新算法应用在大空间建筑火源定位中能更好恢复火源的三维深度信息。
关键词摄像机标定加速鲁棒性特征火焰熵值改进遗传算法火源定位
PRECISE LOCALISATION METHOD FOR FIRE SOURCES IN LARGE-SPACE BUILDINGS
Mao Ying1Wang Huiqin1,2Lu Ying1,2Qin Like1
1(School of Information and Control Engineering, Xi’an University of Architecture and Technology, Xi’an 710055,Shannxi,China)2(School of Management ,Xi’an University of Architecture and Technology, Xi’an 710055,Shannxi,China)
AbstractIn order to solve the problems of low accuracy in fire source localisation and poor real-time property in large-space buildings, we proposed a solution framework of improved genetic algorithm, which is based on flame image entropy accelerating the robust feature (SURF), to apply in the fire source localisation of large-space buildings. Under the condition of good fire source detection, it first extracts flame feature points with SURF algorithm, then introduces the entropy of the feature points to reduce mismatching, and gets better matching-point pairs to further solve the parameters of video camera. We designed a genetic algorithm for camera calibration in fire source localisation of large-space buildings by improving the selection, crossover and mutation operators, and finally obtained the three-dimensional information of fire source. Experimental result illustrated that applying the proposed new algorithm in fire source localisation of large-space buildings can better restore 3D depth information of fire source.
KeywordsCamera calibrationAccelerating robust featuresFire entropyImproved genetic algorithmLocalisation of fire source
0引言
在城市化发展进程中,大空间建筑的出现给我们的生活带来便利,但是大空间建筑中严峻的火灾形势也给人们带来了严重的危害。火源定位是火灾探测和火灾扑救的重要中间环节,火源定位的精度和实时性直接影响到火灾及时有效的扑救。因此在火灾发生初期及时有效地确定火源位置并灭火具有很强的实用性和研究价值。
火源定位可分为四个步骤,如图1所示。

图1火源定位流程图
摄像机标定是其关键环节。标定结果的精度和算法的鲁棒性直接影响到后面获得火源三维空间位置的准确性。通过对标定技术进行研究、仿真、分析确定自标定方法[1]适用于大空间建筑火源定位摄像机标定情况。
文献[2]中用SIFT算法对火焰图像进行特征点提取和匹配,虽然SIFT算法对火焰图像的尺度变换和抗噪声性较好,但SIFT算法的时间复杂度较高会影响到后面定位灭火的实时性,并且局部匹配可能会丢失火焰图像中的一些重要信息。文献[3]中使用基于双目视觉的摄像机标定方法,该方法可对畸变因子进行校正,但在大空间火源定位中运动参数未知,高温危险环境下无法使用标定快,不具有适用性。文献[4]中用遗传算法对摄像机标定结果进行优化。该方法可以提高摄像机自标定结果的精度,并排除噪声点造成的极点不稳定情况。但未对局部最优解作相关。未能对选择、交叉、变异算子做合理设计。使得标定结果的鲁棒性欠佳。文献[5]综述了遗传算法的改进方法及适用性。
本文在文献[2-5]的基础上,用多幅不同燃料的火焰图像作为研究对象,从提高火源定位精度的角度出发,提出一种基于SURF的改进遗传算法求解框架。根据火焰图像亮度信息用SURF算法进行特征点提取和匹配,得到较好的匹配点对,摄像机标定用自标定方法,用遗传算法对标定结果进行优化解决其精度不高问题,设计适用于大空间火源摄像机参数优化问题的选择、交叉、变异算子。实验结果表明,该算法能有效提高大空间建筑火源定位的精度,满足大空间建筑火源定位要求,能更好地应用在大空间建筑火源定位中。
1图像配准与摄像机自标定
1.1图像配准
特征点提取和匹配是后面摄像机标定以及三维信息恢复的保证。针对火源摄像机标定实时性差的问题,SURF[6,7]算法在准确性、重复性和鲁棒性上均优于其他同类算法,在计算速度上有明显优势,因此采用文献[8]中所提的SURF算法进行火源特征点提取和匹配。
1.2摄像机自标定
基础矩阵表示相同场景不同视角图像间的一种摄影几何关系。表示为:
m′Fm=0
(1)
式中m和m′分别为两幅图像上的匹配点对,F为基础矩阵。
kruppa方程为:
(2)
通过多对匹配点求出F解出式(2)中的C(K中的元素)即为所要求的值。
在完成特征点提取匹配以及得到标定结果后利用三角形定位原理[9]来计算火焰三维深度信息。
2大空间建筑火源定位
2.1火源图像特征识别与匹配
在大空间建筑火灾发生时,视频帧中的火焰边界不断变化,因此主要利用火源的高亮度特征来进行特征识别,保证及时有效性,对于火源图像的灰度值求取二阶导,得到亮度变化率的变化率,利用改进的SURF算法进行特征点提取。实验研究发现,在火源特征点提取中,由于许多特征点所含信息量较少,导致匹配计算量增加,为了解决这个问题,本文在火源图像配准中引入火源特征点的熵值,通过计算火源特征点熵值来检测其信息量,去掉信息量过低的特征点,提高算法效率,同时设定特征点距离阈值,删除排列密集的特征点,提高算法的准确度。
改进算法具体步骤如下:
Step1设两幅图像上离散像素点分别为I1(x1,y1)、I2(x2,y2),构造Hessian矩阵行列式近似值图像,找出图像上亮度变化像素点;
Step2用不同尺度的高斯模板构造尺度空间,处理hessian矩阵找其最大值或最小值做初步特征点。选取特征点主方向,构造surf描述算子;
Step3设提取的特征点集合为M,计算M集合中所有元素的熵值H,计算所有熵值的均值作为阈值Hm,设距离阈值为L,选取所有大于Hm和L的特征点;
Step4匹配得到匹配点对m和m′。
2.2大空间火源定位中摄像机标定及深度信息计算
为了获取大空间火源位置,利用匹配点对m和m′,以及式(1)和式(2)求出标定结果,进而求出三维深度信息。针对标定结果精度不高问题,遗传算法[10,11]提供了一种效率高且鲁棒性强的方法。因此设计一种适用于大空间建筑火源摄像机标定的遗传算法。
改进算法具体步骤如下:
Step1生成初始种群N。编码方式选择实数编码。
参数设置:NP=100,pc=0.7,pm=0.01,length=5,NG=100。X=(x1,x2,…,xm),xi∈R,i=1,2,…,m(m为个体数目),xi为摄像机内参数的五个值fn、fv、u0、v0、s。
Step2适应度函数。令式(2)中三个等式依次为f1,f2,f3转化为优化代价函数并作为适应度函数:
f(fn、fv、u0、v0、s)=(f1-f2)2+(f1-f3)2+(f2-f3)2
(3)
通过使优化代价函数最小(或接近于0)来求得各参数其中m个个体的适应度值为fm。
Step3改进选择算子。选用精英保留策略和轮盘赌选择相结合。先精英保留,适应度值fm按从大到小排序,选择种群中fmax直接复制到下一代,再轮盘赌选择,下一代的(N-1)个个体根据上一代N个个体的适应度以概率选择方法进行选择。

Step5改进变异算子设计。 选择自适应变异算子。缩小适应度较大的个体的变异范围。避免收敛至局部最优,增大适应度较小的个体的变异范围和变异概率,保证群体中个体的多样性。
Step6设当前运行代数为R,最大运行代数为Rmax。当R满足Rmax时遗传算法结束,输出最优标定结果。
Step7获得匹配和标定结果,利用大空间三角形定位原理计算出三维深度信息。
3思想流程和核心代码实现
具体思想及流程如图2所示。

图2 算法思想及流程示意
(1) 监控系统发现火灾后,摄像机拍摄火灾视频,截取视频中两幅火焰图像;(2)用SURF算法提取火焰特征点引入火焰熵值减少劣特征点并匹配;(3)完成摄像机标定;(4)用改进遗传算法优化得到最优的标定结果;(5)利用三维重构理论中的三角形定位原理完成火源定位计算出火源的三维深度信息。
• 火焰匹配中核心代码实现
用Hessian矩阵检测特征点部分加入熵值计算,提高匹配率,减少匹配时间。
FastHessian::FastHessian(std::vector
%参数:存特征点,(阶梯,层,采样间隔)金字塔参数,阈值。
double Entropy(std::vector
%计算火焰特征点熵值,删除熵值小的特征点
void Surf::getDescriptors(bool upright) %特征点描述
void Surf::getOrientation() %调两个子函数确定主方向
void getMatches(IpVec &ipts1, IpVec &ipts2, IpPairVec &matches)
%参数:图1特征点描述子,图2特征点描述值,匹配结果。
• 标定中核心代码实现
用自标定方法得到标定结果,改进遗传算法中选择、变异、交叉算子,得到精度高的标定结果。
ComputeF(vector
% 计算F
Pfclose(fundmental); PfromF(F,P)
% 由F计算投影矩阵
NewAutocalib(K,P); cvMatMul(K,P)
%标定完成
(NP=100,pc=0.7,pm=0.01,length=5,NG=100)
%参数设置
Pop(i)*K=rand(1)*K;
%随机赋初值
K={ fu ,fv ,u0, v0,s}={ 679.29 ,681.35,258.80,383.19, -0.55};
f(fu,fv,u0,v0,s)=(f1-f2)^2+(f1-f3)^2+(f2-f3)^2;
%适应度函数构造选择算子改进:锦标赛选择法与精英保留相结合
pt_ts=rand(1)*(popsize*2-1)+1;
%锦标赛选择法
if pop(i).fit>bestfit
%精英保留策略
交叉算子改进:启发式交叉算子
fitavg(k)=mean(cross_temp1′);fitmax(k)=max(cross_temp1′);
couple=randperm(popsize);
变异算子改进:自适应变异算子
fitavg(k)=mean(muta_temp1′);fitmax(k)=max(muta_temp1′);
4实验结果及分析
为了验证算法的有效性,在Windows XP(内存为4 GB,CPU为3.10 GHz,显存为256 MB)的平台下使用VisualC++6.0及Opencv及Matlab等开发工具进行实验。用三组火源图片做实验,用20组匹配点对运行本算法100次,图像大小均为640×480像素。
在应用实例中,选取三幅测试图片进行实验,图片是在长30 m,宽30 m,高7 m的空间中拍摄选取。
匹配结果如图3-图5所示。

图3 第一组测试图片及匹配结果
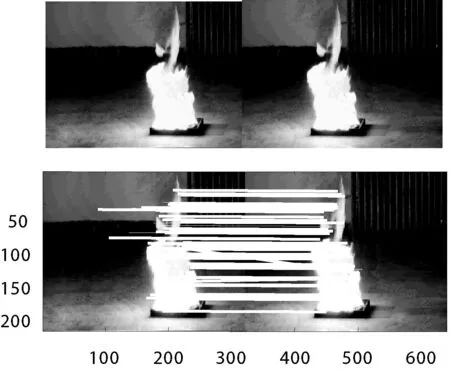
图4 第二组测试图片及匹配结果

图5 第三组测试图片及匹配结果
图3-图5的X轴和Y轴分别表示计算特征描述符时将X轴和Y轴特征点邻域进行投影的方向数,从图3-图5可以看出基于火源熵值的SURF算法对拍摄的火焰图片匹配结果较好。
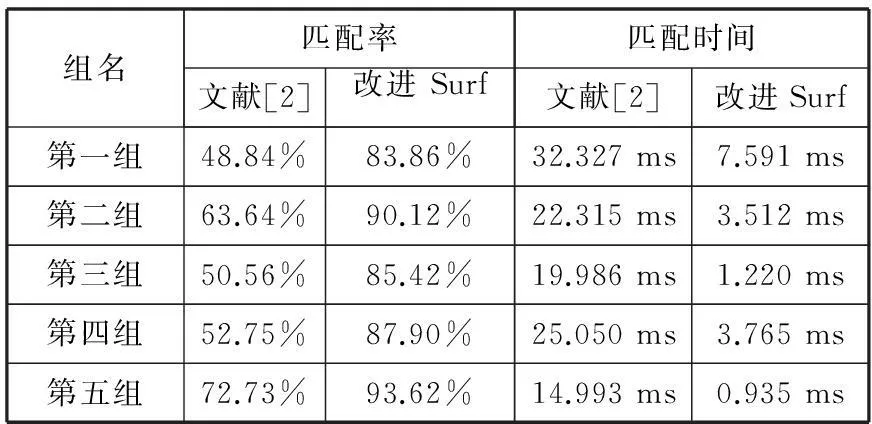
表1 改进SURF算法匹配率匹配时间比较
在本测试中(如表1所示),可以看出改进SURF算法匹配率均达到80%以上,提高了匹配精度同时减小了匹配时间。为后面标定做好了充分准备,延时问题得以解决。

表2 改进遗传算法摄像机标定结果比较

表3 不同方法下的误差值
fn、fv、u0、v0、s的边界范围为[0,1000]、[0,1000]、[0,500]、[0,500]、[-1,1]从表2和表3可以看出,通过对比可以看出本文算法标定结果精度高于其他标定方法,且误差最小,更接近摄像机参数。实验结果表明大空间建筑火源中摄像机标定的改进遗传算法有效提高了摄像机标定的精度。
为了验证算法在大空间建筑火源三维深度信息获取应用中的有效性,与文献[12]在基本条件相同、算法不同条件下实验对比。基线长度为100 mm焦距为388 mm图像像素大小为640×480。

表4 大空间建筑火源图像三维深度信息结果对比
从表4可以看出,本文提出的新标定方法应用在大空间建筑火源定位中提高了大空间火源三维信息恢复的准确度,提高了建筑火源定位中的精度。
5结语
本文提出一种基于SURF的改进遗传算法框架应用在大空间建筑火源定位中,设计了基于火焰特征点熵值的SURF算法获得好的匹配点对,并完成标定。利用改进遗传算法对摄像机标定结果进行优化,得到最优参数,计算出火源三维深度信息,解决了定位中实时性差和精度不高的问题。仿真结果证明,本文提出的方法对大空间建筑火源三维信息恢复有很好的效果,有一定的实际应用价值。
参考文献
[1] Robbins S,Murawski B,Schroeder B.Photogrammetric calibration and colorization of the SwissRanger SR-3100 3-D range imaging sensor[J].Optical Engineering,2009,48(5):053603-053603-8.
[2] 赵丹阳,王慧琴,胡燕. 火灾视频图像定位中特征点提取和匹配[J].计算机工程与应用,2013,49(11):161-165.
[3] 苏立颖,李小鹏,么立双.双目摄像机快速标定新算法[J].中南大学学报,2013,44(2):364-367.
[4] 任贝,韩飞,吴坚.基于遗传算法的摄像机标定[J].吉林大学学报:信息科学版,2013,31(4):432-436.
[5] Lu K D,Zeng G Q,Chen J,et al.Comparison of binary coded genetic algorithms with different selection strategies for continuous optimization problems [C]//Chinese Automation Congress (CAC), 2013. IEEE, 2013:364-368.
[6] Panchal P M,Panchal S R,Shah S K.A Comparison of SIFT and SURF[J].International Journal of Innovative Research in Computer and Communication Engineering,2013,1(2):323-327.
[7] Saleem S,Bais A,Sablatnig R. A performance evaluation of SIFT and SURF for multispectral image matching [M]//Image Analysis and Recognition.Springer Berlin Heidelberg,2012:166-173.
[8] 张锐娟,张建奇,杨翠. 基于SURF的图像配准方案研究[J].红外与激光工程,2009,38(1):160-165.
[9] 朱剑,赵海,徐久强,等.三角形定位算法的误差分析[J].东北大学学报:自然科学版,2009,30(5):648-651.
[10] 玄光男,程润伟.遗传算法与工程优化[M].北京:清华大学出版社,2003:76-106.
[11] 雷秀娟. 群智能优化算法及其应用[M].北京:科学出版 社,2012:46-52.
[12] 孟浩, 程康.基于SIFT 特征点的双目视觉定位[J].哈尔滨工程大学学报,2009,30(6):649-652.
中图分类号TP391.4
文献标识码A
DOI:10.3969/j.issn.1000-386x.2016.02.041
收稿日期:2014-08-07。教育部高等学校博士学科点专项科研基金项目(20126120110008);陕西省教育厅产业化项目(2011JG12);陕西省自然科学基础研究计划项目(2012JQ8021);教育厅专项科研项目(2013JK1144);西安建筑科技大学校青年基金项目(QN1429)。毛颖,硕士生,主研领域:数字图像处理,火源定位。王慧琴,教授。卢英,博士生。秦立科,硕士生。
