CRH3C动车组轴速度传感器检测原理及代码分析
2016-03-09张长青
张长青
(北京铁路局北京动车段, 北京 102600)
CRH3C动车组轴速度传感器检测原理及代码分析
张长青
(北京铁路局北京动车段, 北京 102600)
CRH3C动车组轮对转速是由轴端转速传感器进行检测,采集测速齿轮信号并输入制动控制单元与牵引控制单元。CRH3C型动车组是通过速度传感器实现对动车组轴不旋转故障的检测。动轴速度传感器为单通道的,它输出的信号只传递给制动控制单元1;拖轴速度传感器为双通道的,分别向制动控制单元BCU1和DNRA输出信号。通过拖轴与动轴的速度检测,可分析出动车组轴不旋转时报出的主要故障代码情况。通过分析故障代码,帮助技术人员准确查找故障发生的原因及故障部件。
CRH3C动车组; 速度传感器; 轴不旋转; 故障代码
1 前言
CRH3C型动车组的原型车是西门子公司制造的Velaro-E动车组,设计速度为350 km/h,运营速度可达350 km/h。我国CRH3C型动车组是由唐山轨道客车有限责任公司生产。该动车组的车体承载结构采用大型中空铝合金型材组焊而成,为筒形整体承载结构。车体具有很好的防振、隔音效果。车体所使用的材料为可焊接铝合金,具有良好的防腐性,重量轻,强度大,安全性高。目前,CRH3C型动车组主要应用于京津城际、武广高速铁路线路运行。
CRH3C型动车组工作速度高,因此,动车组设备可靠性要求也高。CRH3C型动车组运行速度可达350 km/h,为4动4拖8辆编组,采用电力牵引交流传动方式,由2个牵引单元组成,每个牵引单元由2动2拖组成。高速动车组速度传感器是轴不旋转(抱死,下同)、防滑检测的重要速度检测部件,是保证动车组安全可靠运行的基本检测手段。速度传感器是检测动车组轮对正常运转的设备,安装在每根轴的轴端,因此,在动车组上的运用环境十分复杂、恶劣。CRH3C型动车组的每个轴上均安装有速度传感器,用于检测轴是否正常旋转,保证动车组用于检测的轮对运行状态。图1为CRH3C型动车组构成示意图。

图1 CRH3C型动车组示意图
2 防滑速度传感器检测原理
2.1 速度传感器工作基本原理
转速传感器功能是采集车轴转角的位置信号并输入控制单元,以便计算转速,车轮的转速信号通过磁电式转速传感器采集。工作原理如图2所示,由软铁、线圈和永久磁铁组成的磁电式传感器固定在车轮一侧不动,使传感器预先带有一定的磁场,由导磁材料制成的测量齿轮安装在曲轴后端。当金属的检测齿轮靠近传感元件时,齿轮的齿顶与齿根所产生的变化使得传感元件的磁通变化,从而使传感器产生脉冲,控制系统根据脉冲数计算出车轴转速值。[1]根据标准,速度传感器与测速齿轮安装间隙应为(0.9±0.5) mm。图3为转速传感器实际安装图。

图2 转速传感器安装原理

图3 转速传感器安装位置
速度传感器接收信号电流值的范围为7~14 mA,通过一个电阻,转换成电压信号,传输给制动控制单元(BCU:Brake Control Unit,下同)的MB03B板卡。当传感器出现异物击伤、缩针等短路或断路情况时,输出的电流和电压信号值会出现偏差,信号值失效,通过制动控制单元BCU的软件检测,BCU报出故障代码为1736:至少一个WSP(Wheel Slide Protection,下同)速度传感器等传感器信号故障。[1-4]
速度传感器检测车辆速度的反馈值为axlespeed,而动车组速度检测故障原理通过式(1)计算得出:
(0.7V-axlespeed)>50 kph
(1)
其中,V取值与列车速度的参考值相关,当车辆处于牵引状态时,动车牵引电机的速度会比拖车车轴转速高,所以取该动力车厢牵引电机的最高速度为速度参考值,该速度比较接近列车前进速度;当车辆处于制动状态时,动车电机的转速会相对于拖车车轴转速低,这个值与实际车辆速度接近,则取这个数值为速度参考值。这个速度值是给Vref提供依据的重要参考。[2-3]
在正常情况下,(0.7V-axlespeed)的数值都是在50 kph以下,当它的值大于50 kph时,就说明axlespeed数值偏小,且已经超出了安全范围;而当系统持续检测(0.7V-axlespeed)大于50 kph的数值维持在4 s以上时,就会认为轴不旋转(抱死),则动车组会报出轴抱死故障[2-4,7]。
2.2 防滑速度传感器的故障检测
动车中的动轴防滑速度传感器是单通道,它输出的信号只传递给制动控制单元1(BCU1:Brake Control Unit 1,下同),当轴报不旋转(抱死)故障时,制动控制单元BCU1会报出代码为17X2(X为1,2,3,4)的故障,分别代表1轴、2轴、3轴、4轴不旋转。图4为单通道防滑速度传感器。
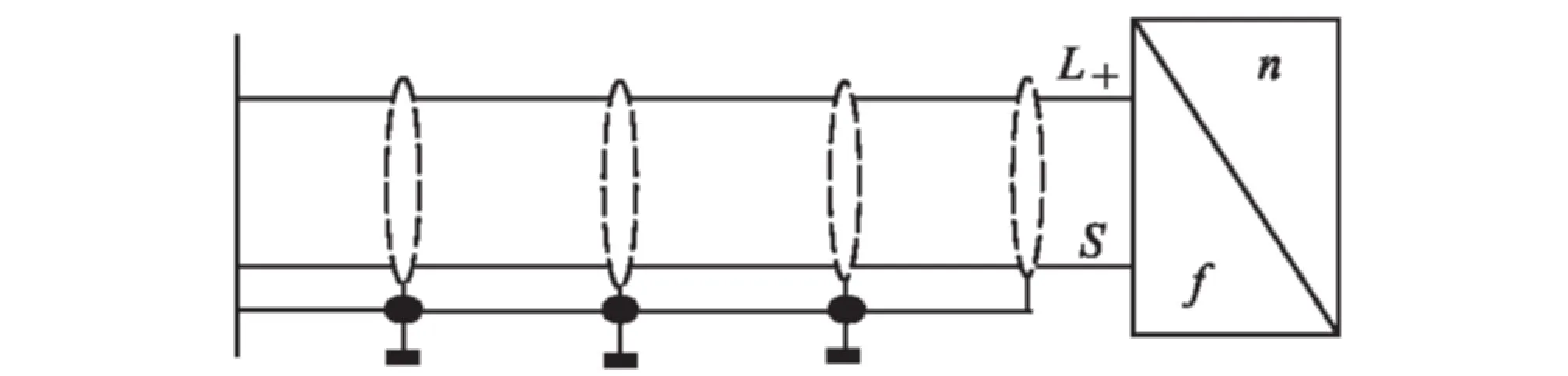
图4 单通道防滑速度传感器
拖车中的拖轴防滑速度传感器是双通道,分别向制动控制单元BCU1和DNRA(Detection of Non Rotating Axles,下同)输出信号。两路是完全独立的,互不干扰。当防滑速度传感器报出轴不旋转的故障时,BCU1会报出故障代码17X2(X为1,2,3,4),分别代表1轴、2轴、3轴、4轴不旋转。而防滑速度传感器报出信号传递给DNRA时,DNRA则会报出故障代码17Y2(Y为A,B,C,D),分别代表1轴、2轴、3轴、4轴不旋转。图5为双通道防滑速度传感器。在实际应用中一般认为拖车中的DNRA控制单元是BCU2控制单元(Brake Control Unit 2,下同)。
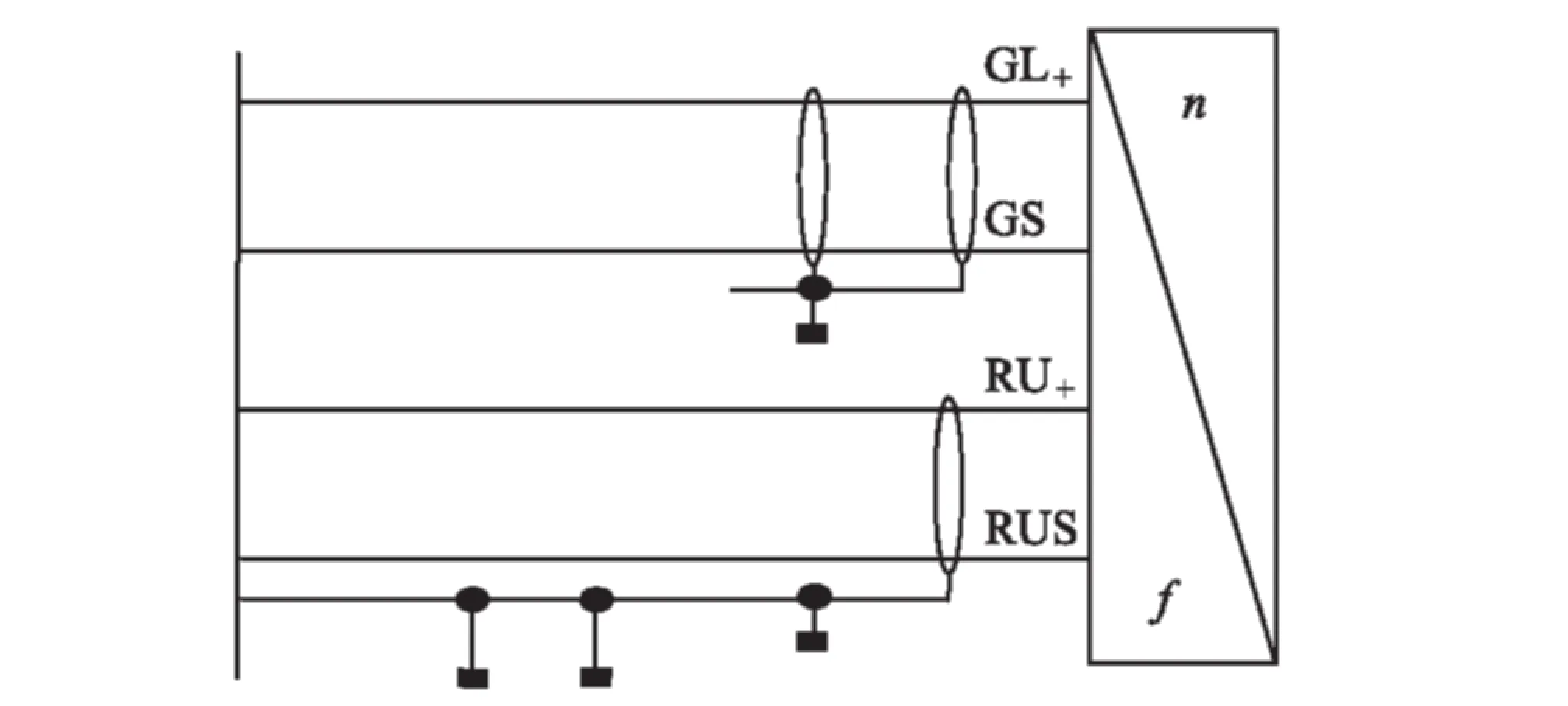
图5 双通道防滑速度传感器
当满足以下任一条件时,都会报出故障代码68C8(列车自动停止DNRA):
(1)当制动控制单元BCU和牵引控制单元(TCU:Traction Control Unit,下同)速度反馈信号都有效时,如果只有制动控制单元BCU或牵引控制单元TCU发送轴不旋转信号,并且此轴不旋转信号持续时间20 s未消失,则中央控制单元CCU(Central control Unit,下同)认为有轴抱死发生。需要注意:CRH3C动车组中TCU的速度反馈信号是由牵引电机速度传感器提供信号。
(2)在制动控制单元BCU和牵引控制单元TCU速度反馈信号中有任何一个信号无效的情况下,如果只有制动控制单元BCU或牵引控制单元TCU发送轴不旋转信号,并且此轴不旋转信号持续时间5 s未消失,则中央控制单元CCU认为有轴抱死发生。
(3)若制动控制单元BCU和牵引控制单元TCU同时发送轴不旋转信号,则不需延时,中央控制单元CCU立即认为有轴不旋转,轴抱死发生。
(4)当同一个轴的制动控制单元BCU和牵引控制单元TCU速度传感器反馈信号都无效时,则认为是滑行监测故障。
上述逻辑控制由制动控制单元BCU和牵引控制单元TCU共同完成;而在拖轴车上轴不旋转(抱死)监测由BCU1和DNRA共同监测完成,但其逻辑关系与动轴车相同。
当动车组由于报出代码68C8故障触发强制制动后,动车组HMI屏出现68C8和6B0E,同时列车自动施加最大常用制动,此时司机不需要施加制动。当HMI屏上出现故障代码6B12(自动滚动试验成功完成)时,司机可以继续按照正常速度行车。如果滚动试验不成功,列车会因强制制动停车,停车后,司机可以40 km/h的速度运行;列车再次进行滚动试验,如果滚动试验成功,则HMI屏提示6B12(自动滚动试验成功完成),司机可按正常速度行驶;如果未出现滚动测试,或者HMI屏上出现故障代码:68C8,19DX(X代表1,2,3,4,5,6,7,8),2F8X(X代表1,2,3,4,)或294D、294E、294F、2950,列车会自动停车,需关43-S12并切除故障车空气制动,限速200 km/h维持运行[2-4,7]。
3 轴不旋转(抱死)故障原因
CRH3C型动车组直通电空制动系统采用微处理器(BCU)控制,备用制动装置采用间接作用的空气分配阀控制,制动的复合方式为再生制动+空气制动。制动系统主要由位于车体的控制元件和位于转向架产生制动力的部件组成,制动力由空气制动和电制动产生。电制动和空气制动由制动控制单元(BCU)、牵引控制单元(TCU)和列车中央控制系统(CCU)调节。CRH3C型车制动系统有六大安全回路,分别为:紧急制动回路、转向架监控回路、停放制动监控回路、乘客报警回路、制动缓解回路、烟火报警监控回路。其中,紧急制动回路、转向架监控回路、停放制动监控回路发生故障时列车施加紧急制动,其他回路故障时列车施加最大常用制动[2-4]。当发生轴不旋转故障时,动车组会报出相应故障代码,提示动车组工作人员采取措施进行处理。发生轴不旋转(抱死)故障原因较多,主要原因是制动板卡问题、齿轮箱问题、联轴节问题、轴端轴承问题、速度传感器自身问题等。
3.1 拖轴不旋转故障检测
CRH3C型动车组每根拖轴防滑速度传感器都有2个独立的通道进行检测,所有的拖车均设有制动控制BCU1与DNRA,分别对各自通道的信号进行独立检测,因此,拖车上的速度传感器为双通道。
当拖车1、2、3、4轴不旋转时:BCU1分别报1712、1722、1732、1742;DNRA分别报17A2、17B2、17C2、17D2。从故障代码中可以辨别出是哪个通道报警。
3.2 动轴不旋转故障检测
CRH3C动车组3车、6车仅有1个制动控制单元(BCU1),而1车、8车虽有2个BCU:BCU1与BCU2,但其BCU2不进行轴不旋转检测,因此,动车轴端的防滑速度传感器为单通道。
当动轴1、2、3、4轴不旋转时,BCU1报1712(轴1)、1722(轴2)、1732(轴3)、1742(轴4)。
牵引控制单元(TCU)所需的速度信号由牵引电机速度传感器信号输入,当轴1、2、3、4轴不旋转时,TCU报294D(轴1)、294E(轴2)、294F(轴3)、2950(轴4)[5-6]。
3.3 传感器自身故障检测
防滑速度检测是2个通道独立检测,能够实现互相校验的功能。当仅仅报单个故障代码,一般是防滑速度传感器自身故障。
如果动车组只报1712这个故障代码,没有报17A2(动车为294D)时往往为误报,是检测系统自身故障,而不是轴不旋转(抱死)故障。此外,不旋转的轴请求了施加制动,则系统会报出68C8。如果真的检测到轴不旋转时,则会同时报3个故障代码出现(例如1轴:1712、17A2、68C8)。
对于传感器故障,是不同于检测轴不旋转,只是检测系统本身的信号故障。
(1)当制动控制单元BCU检测出对应的1轴、2轴、3轴、4轴的防滑速度传感器故障,拖车有如下故障代码:
BCU1制动控制单元故障代码:1711、1721、1731、1741;
DNRA防滑控制单元故障代码:17A1、17B1、17C1、17D1。
还会出现其他故障代码:1736(至少1个WSP速度传感器信号故障)、17C6(至少1个速度传感器DNRA信号故障)。类似于轴不旋转故障代码的检测,带有字母的代码是由DNRA进行检测[5]。
(2)当制动控制单元BCU检测出的对应1轴、2轴、3轴、4轴的传感器故障,动车有如下故障代码:
BCU1制动控制单元故障代码:1711、1721、1731、1741(是防滑速度传感器故障);
TCU制动控制单元故障代码:26F4、26F5、26F6、26F7(是牵引电机1、2、3、4旋转速度传感器故障)。
同时出现其他的故障代码:1736,26FB(拖车轴:未发现旋转速度信号)[5-6]。
当故障发生后确认为传感器自身故障导致,则更换新防滑速度传感器。更换新防滑速度传感器后通过制动控制系统服务终端软件读取更换的速度传感器工作电压,当其工作电压在4 V至10 V之间时,该轴速度传感器正常,并通过该软件清除故障。
4 结束语
随着科技的不断进步和高速铁路的飞速发展,维修已经成为提高生产力、创造效益的重要手段,也是保障动车组安全稳定运行的可靠方法。高速动车组修程修制是一门涉及多专业、多学科的综合性理论。为便于对CRH3C型高速动车组轴抱死故障的理解和认识,在动车组进行一、二级修时,要加强动车组日常检修,技术人员掌握代码含义及发生的条件,通过分析故障代码,准确查找故障发生的原因及故障部位或者相关部件,把此类故障及时排除,提高了技术人员查找故障的能力,更好地保证动车组安全可靠地运行。
[1] 熊诗波,黄长艺.机械工程测试技术基础[M].北京:机械工业出版社,2006. Xiong Shibo,Huang Changyi. Testing Technology Base of Mechanical Engineering[M]. Beijing: China Machine Press,2006.
[2] 唐山轨道客车有限责任公司.CRH3型动车组用户文件[Z].唐山:唐山轨道客车有限责任公司,2008. Tangshan Railway Vehicle Co., Ltd.. User Documentation on CRH3 EMU[Z].Tangshan: Tangshan Railway Vehicle CO LTD,2008.
[3] 长春轨道客车有限责任公司.时速380公里速度级动车组(8辆编组)维护检修手册[Z].长春:长春轨道客车有限责任公司,2010. Changchun Railway Vehicle Co., Ltd.. Maintenance Manual for 380 km/h EMU (8 Cars)[Z]. Changchun:Changchun Railway Vehicle Co.,Ltd.,2010.
[4] 北京铁路局北京动车段.北京动车段分析报告手册[Z].北京:北京铁路局北京动车段,2013. Beijing EMU Depot. Analysis Report of Beijing EMU Depot[Z]. Beijing: Beijing EMU Depot, Beijing Railway Bureau,2013.
[5] 唐山轨道客车有限责任公司.3C型动车组故障代码表[Z].唐山:唐山轨道客车有限责任公司,2008. Tangshan Railway Vehicle Co.,Ltd.. Fault Diagnosis Codes on CRH3 EMU[Z]. Tangshan: Tangshan Railway Vehicle Co.,Ltd.,2008.
[6] 曹宏发,樊贵新,章阳,等.和谐号动车组电子制动控制单元[J].铁道机车车辆,2011,31(5):15-19. Cao Hongfa,Fan Guixing,Zhang Yang,et al.Electronic Brake Control Unit of China EMU [J]. Railway Locomotive & Car,2011,31(5):15-19.
[7] 陈伟,周军,王新海,等.和谐号动车组制动防滑控制理论和试验[J].铁道机车车辆,2011,31(5):32-38. Chen Wei,Zhou Jun,Wang Xinhai,et al. Theory and Test of Wheel-slide-protection System in Brake Control of China EMU[J]. Railway Locomotive & Car, 2011,31(5):32-38.
Detection Principle and Code Analysis for Axle Velocity Sensor of CRH3C-EMU
ZHANG Changqing
(Beijing EMU depot, Beijing Railway Bureau, Beijing 102600,China)
The wheel-set speed of CRH3C EMU is detected by axle velocity sensor, and the signal of rotating axle is collected by speed measuring gear and inputted to brake and traction control unit. The non-rotating axle of CTH3C EMU is detected by axle velocity sensor. The velocity senor of motor axle is single channel whose output signal is only inputted to break control unit 1; The velocity senor of trailer axle is binary channels whose output signals are respectively inputted to brake control unit 1 and DNRA. By detecting velocity of trailer axle and moving axle, the main fault code of non-rotating axle can be analyzed. By analyzing fault code, technicians will find the fault reason and fault part exactly.
CRH3C EMU; speed sensor; non rotating axles; fault code
2015-10-29
张长青(1979-),男,工程师。
1674—8247(2016)01—0015—04
U226.5+1
A