轮对在线检测中基于异面特征点的摄像机标定
2016-03-04陈康吴开华
陈康++吴开华
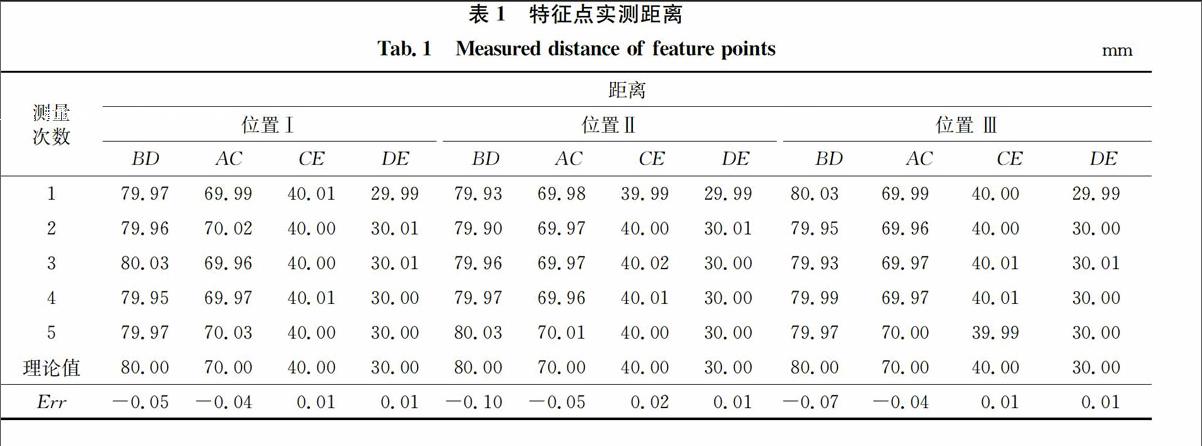
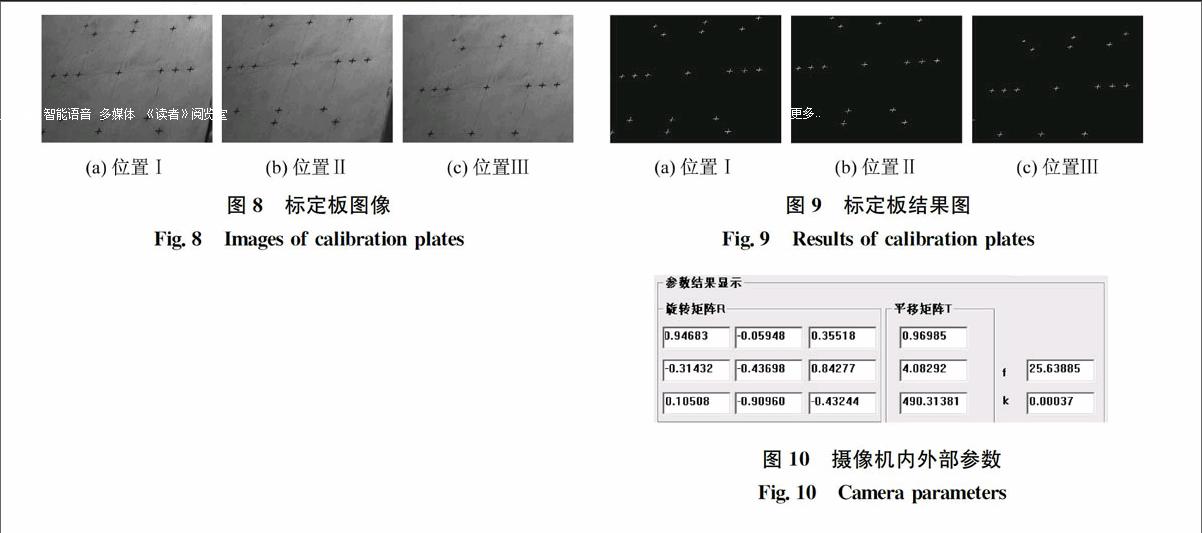
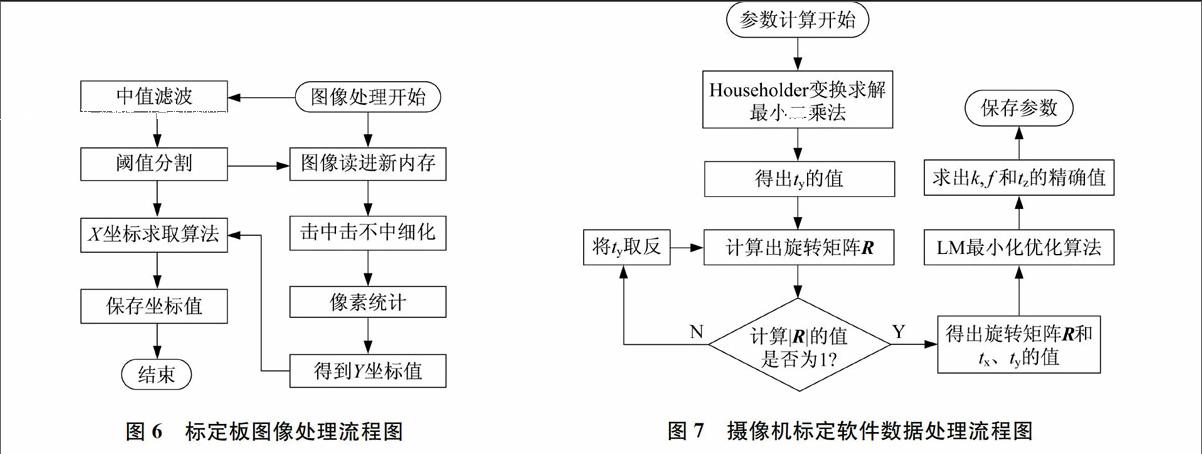
摘要: 基于光截图像的轮对在线检测中,摄像机的标定技术直接影响轮对参数的检测精度。针对轮对在线检测环境,设计了一套摄像机标定系统。在该系统中,设计特制的平面标定板,将其竖直固定于轨道面不同位置,通过异面特征点实现了摄像机的标定。并利用摄像机标定软件实现了标定板图像采集,图像处理,特征点计算机图像坐标提取和摄像机内外部参数计算。实验结果表明,该标定系统的摄像机标定精度在0.1 mm以内,可应用在轮对在线检测中。
关键词: 轮对在线检测; 摄像机标定; 光截图像; 异面特征点
中图分类号: TN 29文献标志码: Adoi: 10.3969/j.issn.10055630.2016.01.001
Research on camera calibration technique of wheel set online
detection based on noncoplanar feature points
CHEN Kang, WU Kaihua
(College of Life Information Science and Instrument Engineering, Hangzhou Dianzi University,Hangzhou 310018,China)
Abstract: In the wheel set online detection based on structured light projection image technique, the camera calibration technique directly affects the precision of wheel set online detection. According to the environment of wheel set online detection, camera calibration system was designed. In the system, the special calibration plate was vertically installed on the rail surface. The noncoplanar feature points were used to realize the camera calibration. The camera calibration software realized the calibration plate image acquisition, the image processing and the extraction of computer image feature points. Finally, the software calculated internal and external parameters in the camera coordinate. The experimental results showed that the camera calibration accuracy was less than 0.1 mm. This system can be used on wheel set online detection.
Keywords: wheel set online detection; camera calibration; lightsection image; noncoplanar feature points
引言
轮对是车辆最重要的组成部件之一,其工作状态对车辆的安全行驶有着重要影响[12]。随着计算机技术、CCD传感器技术等的发展,基于光截图像测量的车辆轮对在线检测技术成为目前轮对检测领域研究的重点之一[35]。而在轮对在线检测中,摄像机标定技术又是一项关键技术,标定方法和精度对轮对在线检测的最终结果有较大影响。
目前在轮对在线检测中使用的摄像机标定方法有如下几种:文献[6]将摄像机的内部参数和外部参数分开求取,基于二维棋盘格标定板,使摄像机在不同方位拍摄可移动标定板的多幅图像完成摄像机内部参数标定,然后固定标定板,采集一幅标定板图像,通过标定板平面与对应图像的单应性矩阵完成摄像机外部参数标定,该检测方法对于轮缘高度、宽度和垂直磨耗的测量重复性小于0.3 mm;文献[7]提出将标定板倾斜安装在轨道面上,并使标定板平面与激光面相重合,将三维空间标定转化为二维平面标定,使用二元二次函数建立非线性畸变标定模型,利用标定板上特征点的像方坐标和物方坐标求出像方坐标到物方坐标的二元二次变换函数,再利用该变换函数作用于拍摄的轮对图像,实现系统的标定,系统测量精度在0.5 mm以内;文献[8]提出利用几何光学成像原理,得到摄像机的理论位置和角度,设计出标定板特征点理论成像坐标,调节摄像机,使标定板特征点实际成像坐标与理论成像坐标近似重合,再计算出摄像机实际位置与角度,此方法精度较高,但摄像机调节不便。
本文根据轮对在线检测中实际环境要求,设计了一套摄像机标定系统。并利用软件集成很多算法,完成标定板图像采集,图像处理,特征点计算机图像坐标提取和摄像机内外参数计算。
光学仪器第38卷
第1期陈康,等:轮对在线检测中基于异面特征点的摄像机标定
1轮对在线检测原理
图1轮对在线检测示意图
Fig.1Wheel for online detection schemes轮对在线检测原理如图1所示。当轮对进入检测区域时,激光线光源以光平面的形式照射轮对,在其表面形成一条光截曲线。该光截曲线包含了轮对的轮缘和踏面磨耗等轮对相关几何尺寸参数信息。面阵CCD摄像机采集该轮对光截曲线图像,通过图像处理算法,将该光截曲线转化为单像素光截曲线,根据摄像机标定算法所求出的摄像机内外部参数和光平面的角度,可计算出轮对光截曲线关键点的世界坐标,进而求出轮对的轮缘厚度、高度和踏面磨耗等轮对相关参数。
