中国散裂中子源直线加速器控制网测量及精度研究
2016-02-26柯志勇何振强
马 娜,董 岚,梁 静,柯志勇,何振强
(1. 中国科学院高能物理研究所东莞分部,广东 东莞 523803; 2. 东莞中子科学中心,广东 东莞 523803)
Measurement and Research of Control Network’s Accuracy of
CSNS Linear Accelerator
MA Na,DONG Lan,LIANG Jing,KE Zhiyong,HE Zhenqiang
中国散裂中子源直线加速器控制网测量及精度研究
马娜1,2,董岚1,2,梁静1,2,柯志勇1,2,何振强1,2
(1. 中国科学院高能物理研究所东莞分部,广东 东莞 523803; 2. 东莞中子科学中心,广东 东莞 523803)
Measurement and Research of Control Network’s Accuracy of
CSNS Linear Accelerator
MA Na,DONG Lan,LIANG Jing,KE Zhiyong,HE Zhenqiang
摘要:针对中国散裂中子源(CSNS)210 m长、6 m宽的大尺度直线隧道控制网,提出了具体观测方案,对观测仪器的选择、控制网布设、测量方式及数据处理进行了介绍;基于两类跟踪仪分两期测量,并采用相邻站拟合偏差、边角观测差对数据预处理和光束法平差进行了计算,对两型跟踪仪的测量精度及稳定性进行了比较。结果表明:①采用激光跟踪仪观测,相邻站拟合偏差值为0.05 mm左右,测距值不高于0.06 mm,水平和垂直向测角算术平均值在4″以内,且水平向测角精度比垂直向高1″左右;②对于狭长大尺度直线控制网,X向网形可靠,解算精度高,Y向网形易扭曲,解算精度下降;③LeicaAT401型跟踪仪观测精度略高于FARO X1,但当隧道环境稳定之后,两种跟踪仪对于200 m左右的狭长直线网得到的平面方向坐标重复性均在0.5 mm之内。
关键词:大尺度控制网;拟合偏差;边角观测差;光束法平差
大型加速器是利用电场、磁场约束粒子且进行加速,以获取大功率束流的装置,束流功率一般能达到几十到上百千瓦。目前,国内外大型加速器主要有长度约60 m的“神龙一号”电子感应加速器[1]、主环周长161 m的兰州重离子加速器[2]、储存环周长280 m的瑞士光源同步辐射装置[3]、直线加速段202 m和储存环周长240 m的北京正负电子对撞机(BEPC)[4],以及正在建的中国散裂中子源等。大型加速器的安装隧道常达数百米,装置的设计和安装难度极大,定位精度要求极高。国内外主要利用激光跟踪仪建立三维测量控制网,以实现大型加速器各部件的精确定位安装,但对大尺度、高精度控制网的测量精度,还缺乏深入的研究和数据验证。结合我国在建散裂中子源大型加速器的安装调试,本文针对中国散裂中子源(CSNS)210 m长、6 m宽的大尺度直线隧道控制网观测提出了具体的测量方案,对测量数据进行了预处理及平差计算,分析了两种方法的预处理效果,讨论了平差结果中点位绝对和相对精度,以及稳定性等问题,得到了具有参考价值的结论。
一、CSNS介绍
CSNS是中科院高能物理研究所与广东省共建的发展中国家第一台高能强流质子加速器驱动,拥有一台80 MeV负氢直线加速器和一台1.6 GeV快循环质子同步加速器的强中子源装置,其直线加速器长210 m,同步环周长374 m,建成后将成为具备国际水平的中子科学综合试验装置。
CSNS直线隧道位于地面20多米以下,采用加强混凝土浇筑,于2013年11月完成土建工作。CSNS直线段控制网具有如下特点:①通视性好,各测站点均可测到较远目标点,有利于提高测量精度;②网形细长,易扭曲,无法闭合,易造成累积误差。
二、测量方案
观测仪器选用上,CSNS控制网测量采用激光跟踪仪[4]替代传统的经纬仪、测距仪、水准仪等测量手段,常用的激光跟踪仪主要有Leica、FARO和API 3种品牌,可以实现测量、放样、点位检查、数据处理、分析计算等功能,其中Leica和FARO跟踪仪精度高、可靠性好,可选型号较多,使用广泛。方案采用Leica AT401型和FARO X1型激光跟踪仪分两期进行观测,并比较检验两种跟踪仪测量精度的可靠性和一致性。
控制网点布设上,CSNS园区的地面初级控制网前期已通过全站仪、GPS、水准经过多期测量获得。设备精密安装的局部控制网是基于地面初级控制网建立的,主要由直线控制网、储存环控制网和输运线控制网组成。对于210 m长、6 m宽的CSNS直线隧道,考虑隧道内定线、准直精度,便于安装等因素,从隧道前端开始每7 m布设一组控制点,整个直线隧道共布设31段,每段在墙上布设距离地面约1.8 m的两个控制点,命名为L××C与L××E,地面布设两个控制点,命名为L××A与L××B(如图1所示),最终形成共124个控制点的直线隧道控制网,其直线前端的L01B与末端的L30B为两个永久控制点,也是地面初级控制网点,外围采用钢筋护桶内用钢筋混凝土浇筑而成,均位于基岩上,其点位坐标已知,作为后期数据处理的基准点;其余控制点标志均采用不锈钢加工而成(其结构如图1所示)。
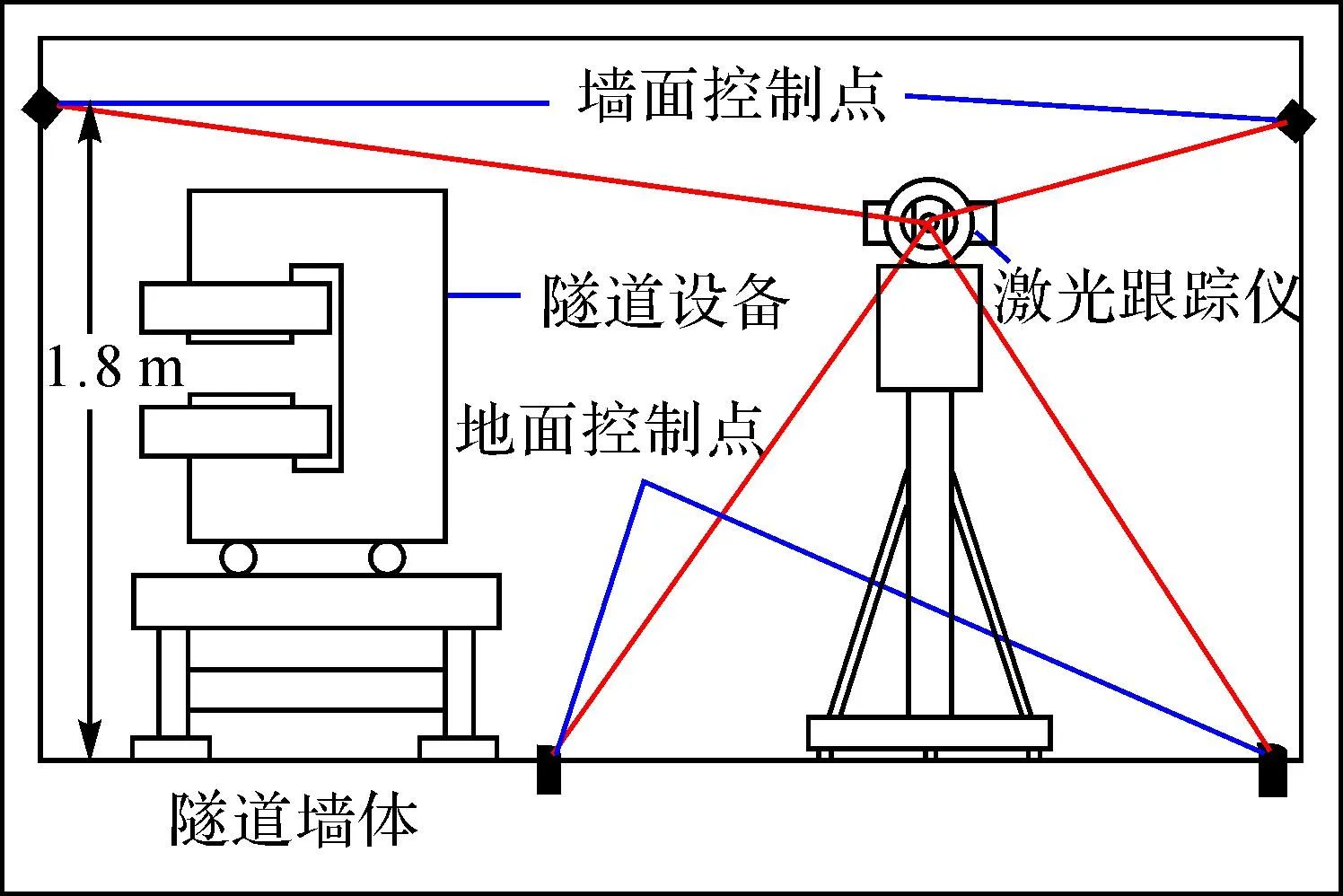
图1 隧道每段控制点分布
测量方式上,采用FARO X1与Leica AT401分两期进行观测,结果分别记作1_FARO和2_Leica,两期测量间隔约半年,以研究激光跟踪仪的观测精度,分析新建直线隧道网的测量精度。由于直线控制网分布于狭长隧道内,考虑跟踪仪的有效测程和测量精度,需采用转站搭接式测量模式,测量方法如下:依次在两组控制点之间放置跟踪仪,每站均向前观测3组,向后观测后3组(如图2所示),整个直线隧道共观测30站。每站观测控制点24个,观测范围约35 m。这样前后站之间共同观测点位达到20个,每个点位至少观测两次,大大增加了多余观测数,提高了转站精度,有效改善了观测网形。
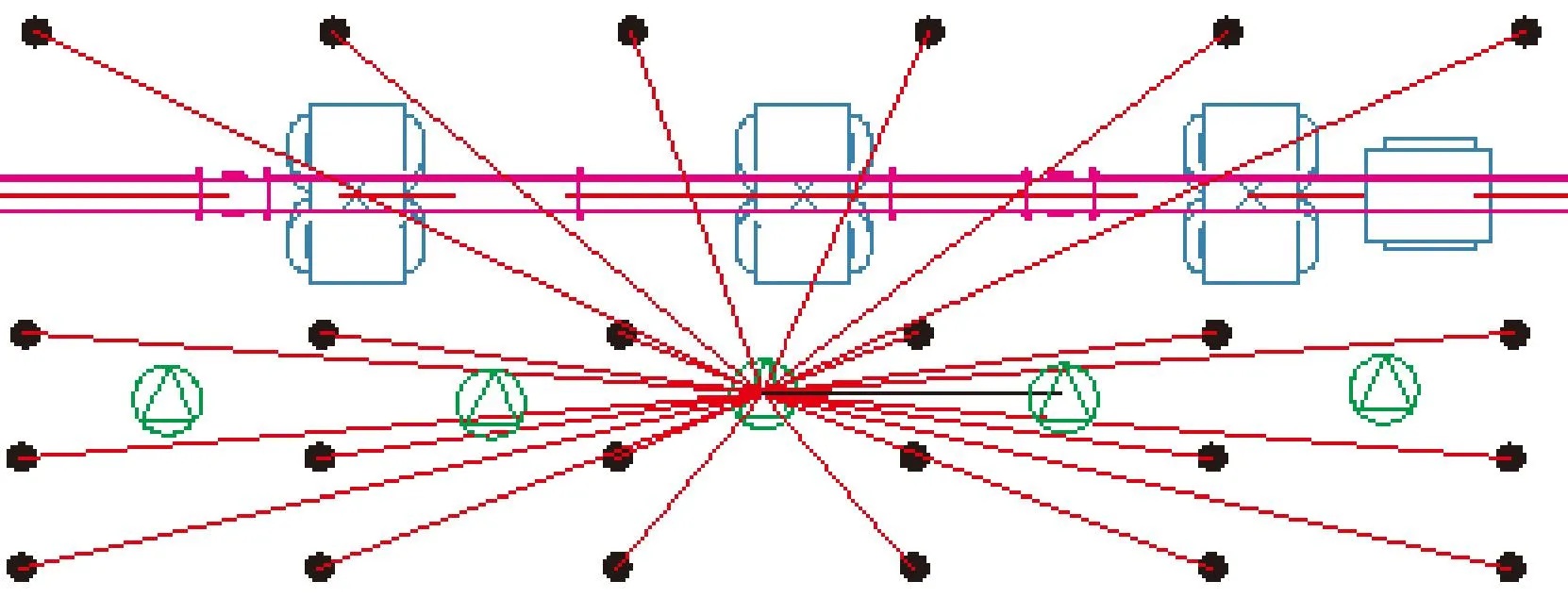
图2 观测方案
观测结束后,先对观测数据进行预处理,方案采用相邻站拟合偏差和边角观测差统计两种预处理方式。相邻站拟合偏差统计在每站观测完后立即进行, 通过将当前站与前一站所测公共点数据进行拟合,计算拟合残差,以检核观测过程中是否存在仪器跑动、人员误操作、激光反射球安置不到位等问题。边角观测差统计[5]是对所有相邻站间的距离、角度观测值进行统计计算,以获得最大、最小误差点位及所在站、总体算术平均值和几何平均值等,查看观测值重复性,找出并删除重复性较差点位并分析其原因,其统计结果将作为平差先验信息。
根据跟踪仪在控制点组间设站和方向观测的特点,采用光束法平差[6]。该方法基于最小二乘原理,多次迭代使观测数改正数平方和最小,从而获得最佳的仪器及观测点位的坐标。
三、预处理及平差结果分析
1. 预处理结果分析
本方案对数据的预处理主要采用拟合偏差统计和边角差统计,分别讨论如下。
(1) 相邻站拟合偏差统计
相邻站拟合偏差计算的结果如图3所示。从图中可知,1_FARO观测的第22、23站和第12、13站的拟合偏差较大,分别达到0.3 mm和0.1 mm,经分析,这主要由当时测量环境潮湿引起。后期数据处理中对这两站中拟合偏差较大的点位予以删除。同时,从两条曲线的走向可知,两种仪器观测数据的相邻站拟合偏差相当,均在0.05 mm左右,但2_Leica站间拟合偏差曲线较平滑,因此该仪器的稳定性可能更高。
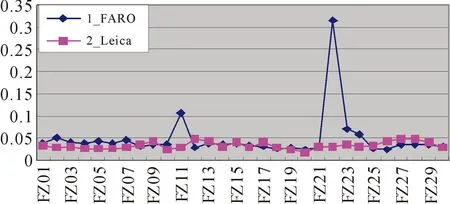
图3 相邻站拟合偏差统计
(2) 相邻站边角观测差统计
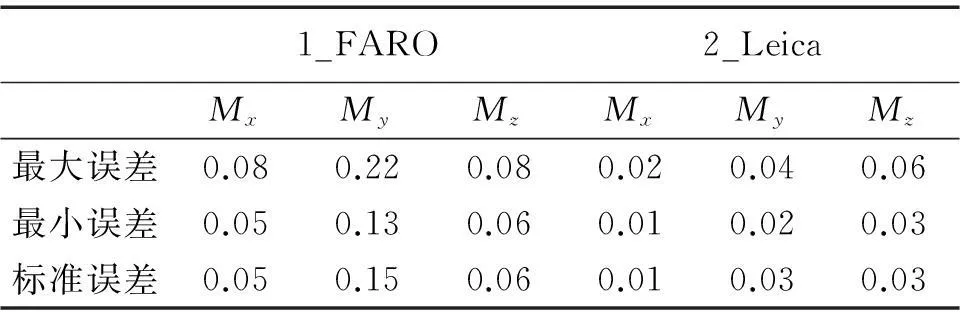
采用笔者所在单位编写的边角统计程序,对两轮观测值进行统计,结果见表1。从测距精度看,FARO X1为0.06 mm,Leica AT401为0.03 mm;从测角精度看,Leica AT401比FARO X1高1″。整体而言,两种仪器水平与垂直测角算术平均值均在4″以内,而水平测角精度比垂直测角高约1″,因此,激光跟踪仪对高程测量精度略低于平面精度。
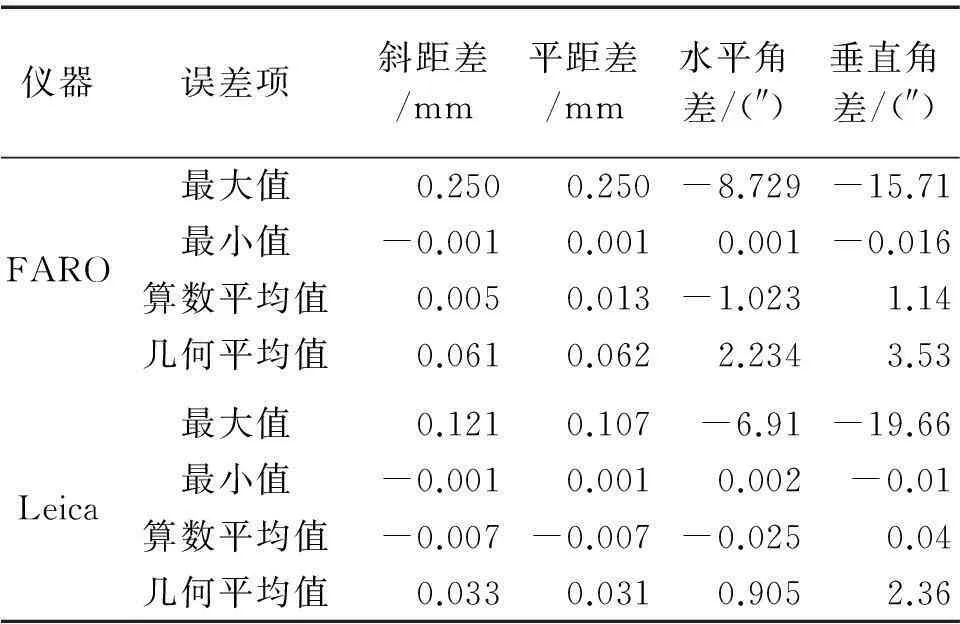
表1 相邻站边角差统计
2. 平差精度及稳定性分析
采用从美国斯坦福直线加速器中心(SLAC)引进的基于光束法平差的SURVEY软件进行计算,该软件经过高能物理研究所在BEPC中的多年应用,已完善为可视化测量平差软件。平差中,以直线两端永久点L01B、L30B作为平面控制点,L01B的高程为起算高程,并对直线隧道网两轮观测数据依次平差,得到点位坐标及点位绝对、相对中误差。以下分别对点位绝对精度、相对精度及控制网标志点稳定性进行分析。
(1) 点位绝对精度
点位绝对精度是检核观测质量和数据处理过程的重要指标。图4中为两期观测得到的X和Y向点位绝对中误差。其中,1_FARO的X向中误差约为0.06 mm,曲线平滑,Y向中误差在0.1~0.3 mm,曲线波动较大;2_Leica的X向中误差约为0.02 mm左右,曲线平滑,Y向约为0~0.15 mm,曲线波动较大。显然,两种跟踪仪测得的X向绝对精度均高于Y向,且两条X向中误差曲线均较平滑,Y向中误差曲线起伏均较大。因此,对于狭长大尺度直线控制网,X向(束流方向)网形可靠性好,解算精度较高,在宽度较窄的Y向(垂直束流方向)网形易发生扭曲,解算精度下降。
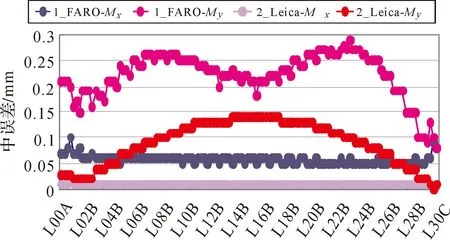
图4 两期观测X、Y向点位绝对中误差
图5为Z向(高程方向)点位中误差。其中,1_FARO的Z向中误差约为0.1 mm,2_Leica的Z向中误差约为0.05 mm。从误差曲线的变化趋势看,除去隧道前端部分,离高程控制点L01B越远,其精度逐渐变差。另外,Z向中误差略高于X向中误差,这是由激光跟踪仪垂直角观测精度差引起的。

图5 两期观测Z向点位绝对中误差
表2为两种跟踪仪观测精度比较,从表中可知,2_Leica的观测精度略高于1_FARO,这也与相邻站偏差拟合、边角差统计的结果相吻合。

表2 两种跟踪仪测量量大、最小及标准绝对误差统计 mm
(2) 点位相对精度
CSNS直线段要求设备控制点X向相对精度为0.5 mm,Y向为0.2 mm,Z向为0.2 mm。控制网点位相对精度直接关系后期的设备安装精度,图6、图7、表3为地面控制点相邻点位的相对中误差。从其中可知,1_FARO的X向和2_Leica的X、Y向各点位相对中误差均满足0.2 mm的安装要求,而1_FARO起始点位Y向相对中误差偏高,在0.2~0.25 mm,经分析认为,这是由直线隧道前端吊装口处观测环境差引起的。整体而言,相邻点位Y向精度低于X向,这也说明狭长直线控制网在较窄方向易发生变形,计算精度下降。
(3) 控制网标志点稳定性
点位坐标的互差值是评价观测精度的重要指标。如图8所示,对两期的观测点位在3个坐标方向分别进行互差。从结果来看,X向两期观测的互差值抖动较大,但从第5站段开始互差值均降至1 mm以内,第10站开始互差值均在0.5 mm以内,互差较大值(1~1.5 mm)出现在前端吊装口附近的4站;Y向互差值整体小于X向,且曲线较平滑,从第4站以后互差值均在0.5 mm以内,与X向类似,吊装口附近的4站,互差值偏大,超过0.5 mm;Z向互差值则随着观测点位延伸至隧道内部,逐渐变大,在隧道末端互差值接近0.9 mm。
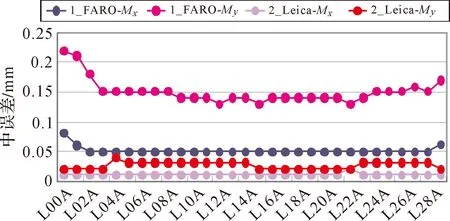
图6 两期观测X、Y向点位相对中误差

图7 两期观测Z向点位相对中误差
mm
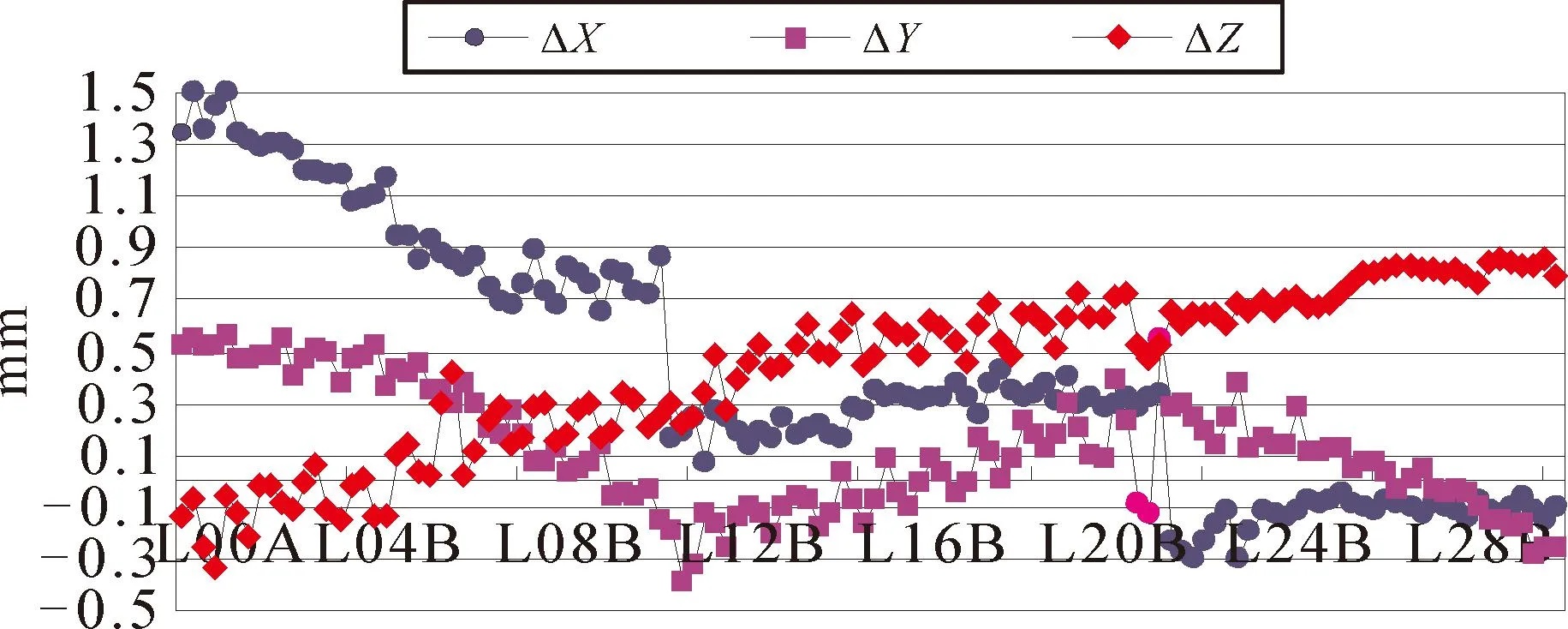
图8 两期观测坐标三方向互差
综上所述,两期观测结果的互差值具有如下特点:①X向与Y向互差值在隧道前端点位偏大,均超过0.5 mm;②Z向互差值随点位坐标增大,即随着向隧道内部延伸而逐渐变大。深入分析后,认为特点①产生的原因主要是因为在隧道前端,因吊装施工、未封闭等因素,风向、震动较大,观测条件差,而中后段则受外界环境影响较小;特点②则是由于直线隧道未闭合,误差通过转站累积所导致。因此可以推断,当隧道闭合,整个隧道趋于稳定后,激光跟踪仪对200 m左右狭长直线控制网观测的平面方向坐标重复性会在0.5 mm以内。
四、结束语
基于在建的散裂中子源直线加速器大尺度直线段准直测量任务,本文提出了对CSNS直线隧道控制网的具体测量方案,对观测仪器的选择、控制网布设、测量方式及数据处理方法进行了详细介绍;采用两类跟踪仪分两期测量,依据数据预处理和平差计算结果,对两类跟踪仪的测量精度及稳定性进行比较。结果表明:①采用激光跟踪仪观测,相邻站拟合偏差值为0.05 mm左右,测距值不高于0.06 mm,水平和垂直向测角算术平均值在4″以内,且水平向测角精度比垂直向高1″左右;②对于狭长大尺度直线控制网,X向网形可靠,解算精度高,Y向网形易扭曲,解算精度下降;③Leica AT401型跟踪仪观测精度略高于FARO X1,但当隧道环境稳定之后,两种跟踪仪对于200 m左右的狭长直线网得到的平面方向坐标重复性均在0.5 mm之内。
参考文献:
[1]李洪, 刘云龙, 章林文,等.直线感应加速器机械轴精密对中方法[J]. 强激光与粒子束, 2004, 16(10):1349-1352.
[2]蔡国柱, 王少明, 满开第,等。 CSR工程三维测量控制网[J]. 强激光与粒子束, 2006, 17 ( 10 ):1590-1594.
[3]WEI F Q, DREYER K, UMBRICHT H. Status of the SLS Alignment System [EB/OL].[2014-05-16]. http:∥www.group1slac1stanford1edu/met/IWAA /TOC_S/2002conf1htm, 20062042021.
[4]于成浩, 董岚,柯明,等,大尺寸激光跟踪仪三维控制网平面精度研究 [J]. 测绘科学, 2008, 33(2): 42-44.
[5]陈影,程耀东,闫浩文.基于VC + +、ObjectARX的边角网平差系统的设计[J].物探与化探,2007,31(1):59-62.
[6]于成浩, 柯明.基于激光跟踪仪的三维控制网测量精度分析[J]. 测绘科学, 2006, 31(3): 25-27.
引文格式: 马娜,董岚,梁静,等. 中国散裂中子源直线加速器控制网测量及精度研究[J].测绘通报,2016(1):104-107.DOI:10.13474/j.cnki.11-2246.2016.0026.
作者简介:马娜(1987—),女,硕士,助理工程师,主要从事精密工程测量及粒子加速器准直测量的理论方法与技术研究。E-mail:mana870518@163.com
收稿日期:2014-11-01
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2016)01-0104-04
