基于迭代算法的直升机起落架总体布局参数设计
2016-02-23黄钦儿贾玉红
杨 俊,黄钦儿,贾玉红
(1.中国直升机设计研究所,江西 景德镇 333001;2.北京航空航天大学,北京 100083)
基于迭代算法的直升机起落架总体布局参数设计
杨 俊1,黄钦儿1,贾玉红2
(1.中国直升机设计研究所,江西 景德镇 333001;2.北京航空航天大学,北京 100083)
应用反复迭代的思想,建立了一套起落架总体布局参数的设计方法,并在已有型号进行了设计验证。验证结果表明了设计方法的有效性。
起落架;总体布局;迭代算法
0 引言
直升机起落架一般有前三点、后三点、滑撬式三种型式。合理的起落架型式及总体布局对直升机的起落安全起着十分重要的作用。起落架的型式因直升机吨位、功能不同而选择不同,其总体布局的各参数设计更是充满矛盾。已有的文献均着重于从某一方面来论述某单一参数的确定原则,而没有考虑其它参数的限制。对于整个起落架,没有一个系统的总体布局方法。本文用反复迭代的思想,建立一套起落架总体布局参数的工程方法,并在已有型号的直升机上进行起落架设计验证。
1 起落架型式选择
前三点式起落架,承载能力强,较适合于运输直升机及相关衍生机型,特别是需要在尾部开舱门的直升机[1]。如SA321“超黄蜂”、EH101等直升机即采用此构形。由于前起落架布置在机身驾驶舱下部,不利于再在机腹安装机炮等攻击设备以及雷达等搜索/侦查设备;坠机后前起落架不能吸收足够多的撞击能量,且前起支柱易于戳穿驾驶舱地板对飞行员造成伤害,抗坠毁性差。因此,该布置型式对于要在机腹下装备机炮、雷达等设备且抗坠毁型要求严格的直升机不太适用[3]。
后三点式起落架则比较适合于武装直升机等攻击机型。其一,由于两主起布置在重心附近、驾驶舱两侧,主起能较多地吸收坠机后触地的撞击能量,具有较好的抗坠毁性;其二,该起落架构型在驾驶舱下方留出了安装机炮、搜瞄设备的空间,安装上述设备后也不会影响飞机牵引。采用后三点式起落架的直升机主要有AH-64、UH-60等。
滑撬式起落架主要适用于轻型直升机,如“小松鼠”、“小羚羊”等机型。
2 起落架布局总体参数确定方法
本文以前三点式为例,介绍直升机起落架布局总体参数的确定方法。直升机起落架总体布局参数主要包括:停机角φ、纵向轮距b、前起至重心纵向距离a、主起至重心纵向距离c、横向主轮距B、机身结构离地最小距离δ、自转着陆角θ、后罩角β。起落架总体布局即是确定这些总体布局参数的过程,参见图1。下面将详述这些参数的确定方法。
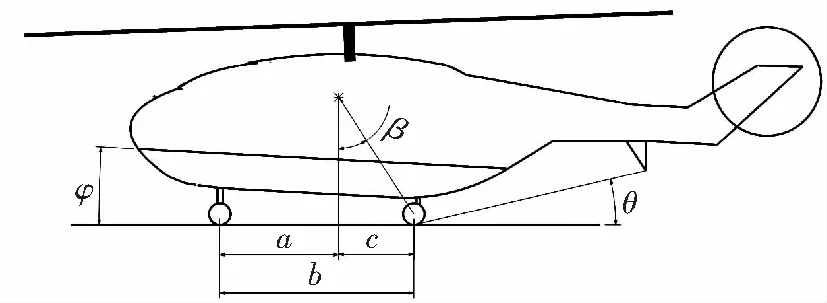
图1 前三点式起落架总体参数示意图
2.1 确定主轮触地点离机身的高度h0
为防止地面凸出物与机身结构相碰,h0的大小要保证,在直升机最大压缩量时,机身最低点(含外部天线)离地最小距离不小于150mm[1],实践中该值可能更大。通过调整h0的大小来满足机身最低点离地要求。h0确定后,画一条与机腹相距h0的水平线l,主轮触地点就在这条直线上。
2.2 确定主轮触地点的纵向位置,即确定c值
c值影响其他两个总体参数:后罩角和自转着陆角。当c值变化时,自转着陆角θ与后罩角β也随之变化。c值的确定原则是要保证获得满意的β和θ。
θ的大小要保证当主轮和尾撑着地且处于最大压缩量时,尾梁和尾桨满足结构最小离地距离δ的要求。满足该前提的条件下,θ不能太大。θ太大将会使后罩角β过大。
β的大小主要考虑直升机防后翻的性能。直升机以大仰角或在坡地着陆时,机身可能向后翻倒;在尾部装载过重时,也可能出现机身向后翻倒的情况。为了保证在上述情形下直升机不向后翻倒,以及后翻后具有一定的“自行恢复”能力,机身需有一个足够大的绕主轮触地点的恢复力矩。如图2所示,需将主起触地点A布置在重心线GO之后,即β>θ,此时重力提供恢复力矩。从这点来说,β越大越好。但若β过大,则又会导致前起落架承载荷过大,重量增加。一般β不小于30°[4]。
暂取β=θ+δ0,δ0为裕度角,过重心G作与铅垂线成β角的直线与直线l相交,交点就是主轮触地点的纵向位置。后面将校核前起落架的承载,以判断该后罩角的合理性。
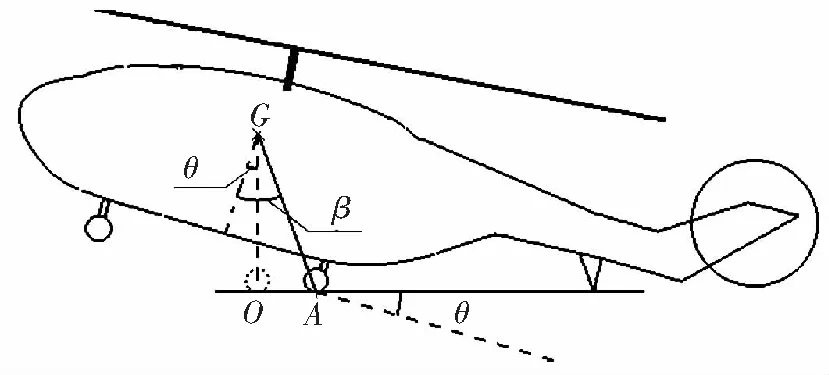
图2 主轮触地点位置确定
2.3 确定前轮触地点的纵向位置,即确定a值
a值关系到机身载荷在前起和主起的分配,以及直升机的防侧翻性能。a值太小,即前轮接近重心,则前起承载加大,且直升机的防侧翻能力不足。因此,在结构允许且不影响直升机总体功能的情况下,应尽可能将该点布置靠前,以增大直升机的纵向轮距。一般前轮承载约机身重量的15% ~ 30%[3]。根据该原则,不妨初步确定前轮触地点的纵向位置(横向位置居中),然后校核各轮的载荷:
F前
G为直升机重量。若计算所得前主轮不满足承载要求,则调整前轮触地点。如仍不能满足承载要求,则返回第一步重新确定主轮触地点位置。
a值和c值确定后,直升机纵向轮距b也就确定了:b=a+c。
2.4 确定横向主轮距B
直升机横向主轮距的选择主要考虑满足运输、停放、防侧翻、重量等要求。若直升机的运输和停放要求主轮距B≤L,现根据防侧翻要求确定横向主轮距。
直升机侧翻事故一般是在坡地上停放,或在有侧风情况下着陆滑跑引起侧滑时产生的[2]。一般地,直升机是沿着前轮触地点和一侧主轮触地点的连线翻倒。侧翻瞬间,直升机一个主轮恰好离地,只有前轮和另一个主轮着地。侧翻瞬间直升机受力情况如图3所示。
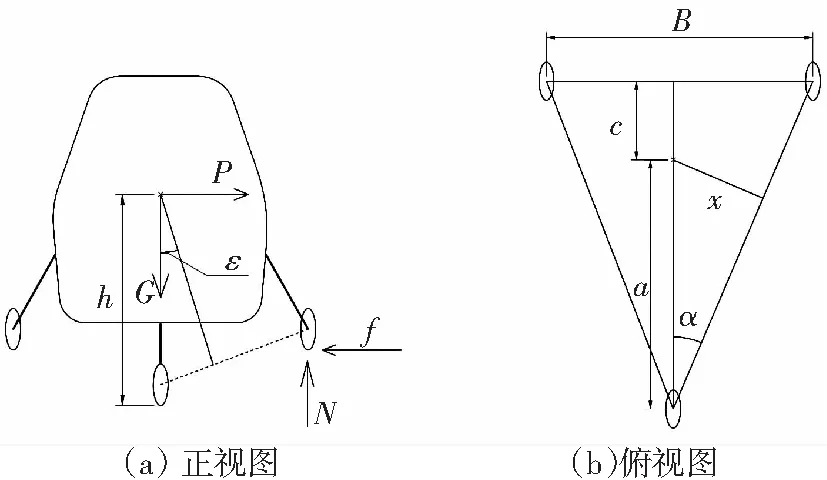
图3 直升机侧翻受力图
直升机受重力G,地面的支持力N,地面摩擦力f,惯性力P。惯性力和摩擦力组成侧翻力矩,重力与支持力组成恢复力矩。要直升机不倾覆,需[2]:
Gx≥fh
从而
或
其中,x—直升机重心在地面的投影到前轮和主轮连线的距离;h—直升机重心到地面的高度;ε—侧罩角,直升机重心到前、主轮连线的垂线与重心铅垂线的夹角,一般取20°~ 30°;μ—机轮与地面的摩擦系数。
由上式可知,重心越低(h小),前轮距重心越远(a越大),到达同样防侧翻性能所需的横向主轮距B越小。
这样,满足运输、停放要求和防倾覆要求的主轮距为:
在此范围内,应尽可能地选择较小的横向主轮距,以减轻直升机重量和机身废阻。
2.5 确定停机角φ
为了使直升机前飞过程中机身基本保持水平,直升机旋翼轴往往相对于机身水平线有个前倾角γ。但这却导致直升机在地面启动时,若不加任何操纵,会因为旋翼拉力有向前的分力而向前滑行。为了减轻驾驶员在地面的操纵负担,特设定停机角φ,使机身后仰以使旋翼轴大致垂直地面,从而达到在地面上减小甚至消除旋翼向前分力的目的。
停机角一般在0~γ之间。太大的停机角除了需增加前起落架的长度导致空机重量增加外,还会使旋翼拉力有向后的分力,结果矫枉过正,而且也不利于飞行员上下驾驶舱[3]。
起落架总体布局的流程如图4所示。
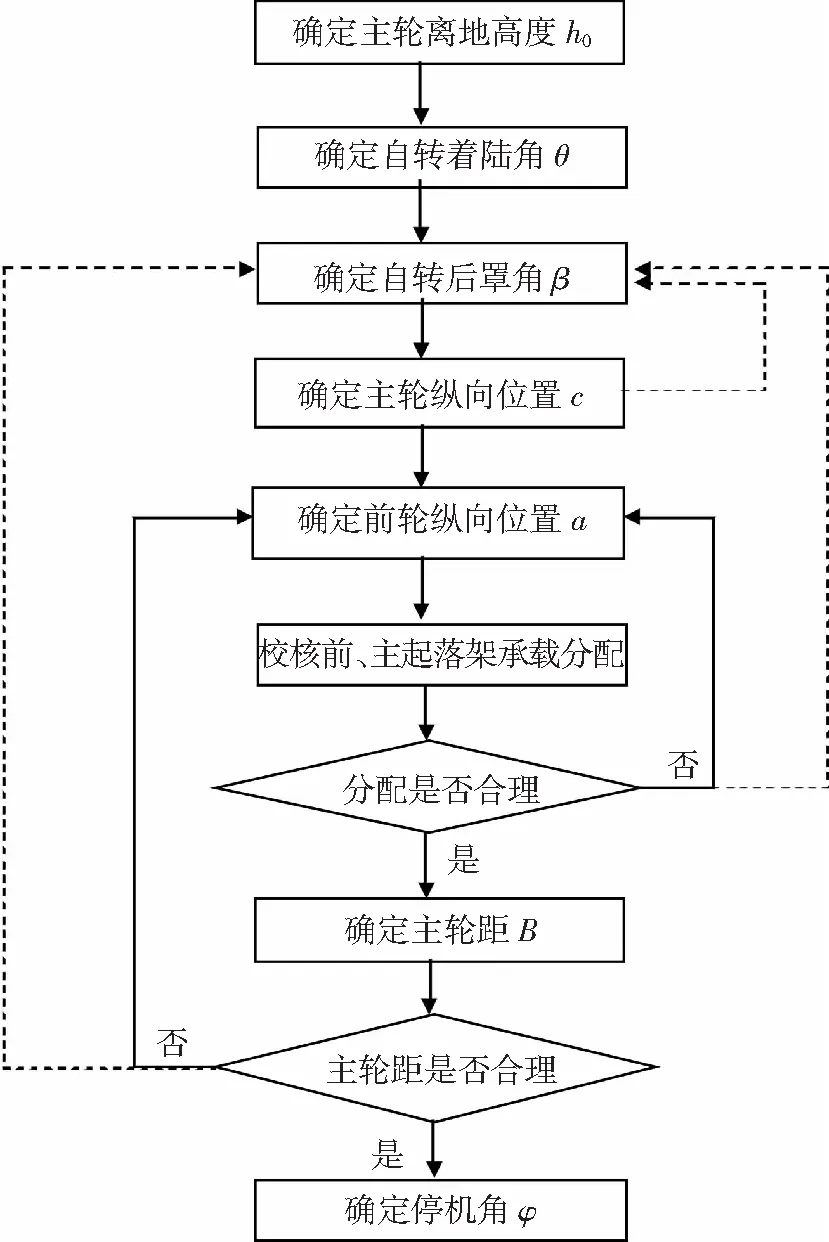
图4 起落架总体布局流程图
3 型号验证
现以某型机为原型,设计其起落架布局总体参数,然后与其原有起落架总体参数进行比较,以验证本文提出的方法的可行性。
3.1 坐标系
OX轴:以机头O点为原点,地板基准水平线为纵轴,向后为正;
OY轴:以O点为原点,向右为正;
OZ轴:以O为原点,向上为正,遵循右手系。
该机最大起飞重量13000kg,重心G点坐标( 6400mm, 0mm,1223mm)。
3.2 参数确定
1)确定主轮触地点离机身的高度。
该机以最大起飞重量停机时,起落架缓冲支柱和轮胎压缩量约280mm,该机机外天线最高者约360mm,取最大起飞重量下天线离地高度δ= 200mm。从而,主轮触地点离机腹高度为360mm + 200mm + 280mm =840mm。以离机身底部840mm画直线AB:主轮触地点就在直线AB上。如图5方案一所示。AB竖坐标为z=-1525。
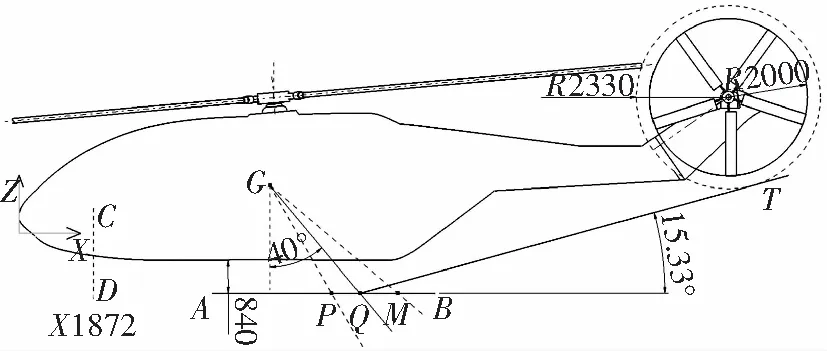
图5 起落架方案一
2)确定主轮触地点纵向位置。
①初步选定后罩角β。试取后罩角为30°:过点G作与铅垂线成30°的直线,与AB交于点P,发现P点太靠近重心,纵向轮距太小,不可取;再试取后罩角为50°:过点G作与重心线成50°角的直线,与AB交于点M,发现点M离尾舱门太近,影响舱门设置,该后罩角依然不可取;最后试取后罩角为40°。过点G作与重心线成40°角的直线,与AB交于点Q(x= 8705,z= -1525)。从图上看,点Q似可作为主轮触地点的初步位置。暂定此点为主轮触地点。此时,后罩角β=40°,主轮触地点离重心纵向距离c= 8705-6400 = 2350mm。
②确定自转着陆角θ。
自转着陆角要保证尾撑着地且处于最大压缩量时,尾桨离地仍有一段安全距离。取安全距离为δ0=150mm,尾撑最大压缩量约为180mm,因此尾撑着地且未压缩时尾桨离地距离应为330mm;而该尾桨半径为2000mm,因而以尾桨中心为圆心,2330mm为半径画圆O:着地线在该圆切线及以外都是安全的。过点Q作圆O的切线QT。此时,自转着陆角为15.33°。
③验证后罩角与自转着陆角的关系是否满足防后翻条件。
β-θ= 40°-15.33°= 24.67°。说明直升机在地面停放姿态24°时,不会产生后翻情况。
3)确定前轮触地点纵向位置a。
①初步确定前轮触地点位置
按照前述原则,前轮尽可能靠前,以增大直升机纵向轮距和防侧翻性能。但又考虑到防止直升机坠毁后前起支柱戳穿驾驶舱地板对飞行员造成伤害,前起落架布置需远离驾驶员位置。因此选择将其布置在机身中部最前端——与驾驶舱对接的地方,这里有大的承力框,对起落架载荷的传递也是合适的。如图所示,暂将前起落架纵向位置布置在CD直线上,该直线的纵向坐标为x=1872mm。此时,前轮触地点离重心纵向距离为a=6400 mm-1872mm=4528mm。
②校核前、主起落架载荷分配。
F前
前起落架分配机身34.2%的重量,前起承载过重。应是后罩角太大引起的。回到第一步,将后罩角改为37°再试。如图6方案二所示。此时,Q点纵向坐标(x=8470,z=-1525)。 主轮触地点离重心纵向距离c= 8470 mm-6400 mm = 2070mm,自转着陆角θ= 15°,β-θ= 37°-15°= 22°,前轮位置不变,纵向轮距b=a+c=4528+2070=6598mm。再次校核前起载荷:
F前
前轮承受全机31.3%的载荷,可以接受。暂定目前状态为前、主轮纵向位置。

图6 起落架方案二
5)确定横向主轮距B。
横向主轮距B的选择应满足直升机的防侧翻能力。考虑到直升机重量最轻时,重心最高,最易发生侧翻,因此以直升机的最小起飞重量作为设计状态。此时重心G点坐标为(6503mm,0mm, 1780mm)。取侧罩角ε=24°,即取μ=tan 24°=0.445,重心离主轮触地点高度为h=1780mm-(-1525mm)=3305mm,a=6503-1872=4631mm。防侧翻所需的主轮距为:
取机身宽度为B=4420mm。将主轮对称布置在机身两侧。
6)确定停机角φ。
该机旋翼轴前倾角为5°,考虑到地面的摩擦力能平衡一部分旋翼向前的拉力,且为方便人员上下舱及减重的需要,设定停机角为2°即可。
4 设计结果与分析
至此,该机起落架布局总体参数已经设计完毕。设计参数与原机参数见表1。
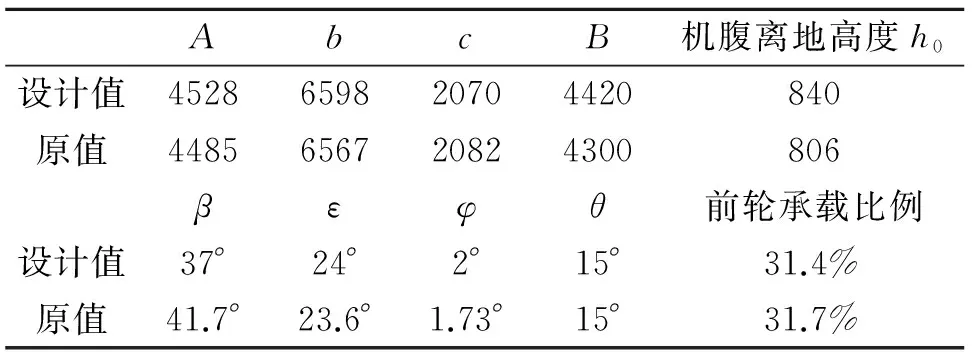
表1 设计参数与原机参数对比(长度单位:mm)
从表1可看出,设计值与原机起落架总体参数十分接近。具体来说,设计纵向轮距比原机纵向轮距更大,这对直升机地面滑行稳定性是大有益处的;前主起载荷分配、侧罩角、自转着陆角大小和原机相当;设计横向主轮距比原机大,后罩角不如原机,其原因是设计机腹离地面高度h0要比原机大,这对于保护机身安全是有利的。但如果因为主轮距增大引起全机重量紧张的话,可以考虑降低机腹离地高度。
5 结论
本文用反复迭代的思想,首先根据机身离地高度要求,确定主轮触地点竖向位置;然后根据防后翻的要求,确定主轮触地点纵向位置;再根据载荷分配要求,确定前轮纵向位置;然后根据防侧翻要求,确定主轮距;最后根据旋翼轴前倾角,确定机身停机角。期间任何一步参数不满足要求,则返回重新进行。由此得出一套反复迭代的起落架总体布置方法。通过对比该方法所得设计值与原起落架参数,验证了本文提出方法的有效性。
[1] 张呈林,郭才根.直升机总体设计[M].北京:国防工业出版社,2006.
[2] 路录祥,王新洲,王遇波.直升机结构与设计[M].北京:航空工业出版社,2008。
[3] 韩国玺.直升机起落架构型分析与仿真试验[D].南京:南京航空航天大学,2008。
[4] 张其中,等,译.直升机工程详细设计[Z].1993.
Design of General Layout Parameters of Helicopter Landing Gears based on Iterative Algorithm
YANG Jun1,HUANG Qiner1, JIA Yuhong2
(1.China Helicopter Research and Development Institute, Jingdezhen 333001, China;2.Beijing University Of Aeronautics and Astronautics, Beijing 100083, China)
This paper provided with a procedure to design the General Layout parameters of helicopter Landing gears using Iterative algorithm. To verify the procedure, compared the design values with the original ones. The corresponding result proved the methods.
landing gear; general layout; iterative algorithm
2016-09-19
杨 俊((1984-),男,湖北监利人,硕士,工程师,主要研究方向:直升机总体气动设计。
1673-1220(2016)04-012-05
V226
A