轻型货车的弯道安全性自动换挡规律
2016-01-18周志立郭志强徐立友
符 冉,周志立,郭志强,徐立友
(1.河南科技大学 车辆与交通工程学院,河南 洛阳 471003;2.中国一拖集团有限公司,河南 洛阳 471003)
轻型货车的弯道安全性自动换挡规律
符冉1,周志立1,郭志强2,徐立友1
(1.河南科技大学 车辆与交通工程学院,河南 洛阳 471003;2.中国一拖集团有限公司,河南 洛阳 471003)
摘要:针对轻型货车在弯道行驶速度过快时,有侧滑、侧翻风险的问题,运用模糊控制的方法,设计了挡位修正模块,嵌入自动变速器换挡模块中,对挡位进行修正。基于提出的修正型换挡规律,以某轻型货车为研究对象,建立其整车模型,进行仿真验证。研究结果表明:修正型换挡规律通过对挡位的控制,平均降低车速11.6 km/h,避免了侧翻事故的发生,提高了行驶安全性。该研究为换挡规律的理论完善和实车运用提供了依据。
关键词:轻型货车;弯道安全性;换挡规律;智能修正
基金项目:河南省重点科技攻关计划基金项目(142102210424);河南省教育厅重点科技攻关计划基金项目(14B460015);河南省重点产学研合作项目(132107000052)
作者简介:符冉(1985-),男,河南南阳人,硕士生;周志立(1957-),男,河南偃师人,教授,博士,博士生导师,主要研究方向为车辆新型传动理论与控制技术.
收稿日期:2014-09-30
文章编号:1672-6871(2015)02-0022-04
中图分类号:U469.2
文献标志码:志码:A
0引言
换挡规律是指自动变速器的挡位随换挡参数变化的规律。挡位调节性能的好坏,直接影响到车辆的动力性、经济性、排放性、安全性和舒适性等[1-3]。因此,研究换挡规律有着极其重要的理论和现实意义。换挡规律经过多年的发展,已由最初的单参数、两参数换挡规律发展为后来的三参数和四参数换挡规律[4-5]。随着智能控制理论的发展,模糊控制和神经网络控制技术等被越来越多地运用到换挡规律的制定与修正中[6-7]。
关于换挡规律的研究,前人多集中于改善车辆的动力性、经济性及避免频繁换挡等方面[4-7],而对于安全性方面的研究较少。近年来,随着汽车保有量的不断增加,交通伤亡事故呈递增趋势,行车安全性越来越引起人们的重视[8]。因此,在安全备受关注的情况下,研究制定轻型货车弯道换挡规律,对控制货车车速、提高其行驶安全性有着重要意义。本文在已有换挡规律的基础上,通过对轻型货车弯道运动学状态进行分析,提出了一种基于安全性考虑的弯道换挡修正规律。
1轻型货车弯道行驶的运动学分析
研究轻型货车在弯道行驶时的稳定性,需要建立其弯道行驶的物理模型。复杂的模型不仅参数繁多,而且不易突出主要矛盾。为了更好地分析货车弯道行驶操纵稳定性的本质特性,本文将对货车系统做出如下简化:
(Ⅰ)忽略轻型货车悬架及其轮胎的弹性形变,将之简化为一个刚体。
(Ⅱ)忽略转向系,以外转向轮转角作为系统的输入。
(Ⅲ)忽略路面不平及车身俯仰、弹跳等对货车稳定性的影响,将之看作一个准静态的转向运动。
货车在弯道运输货物时,侧向受力会急剧增大。其主要由侧向摩擦力提供向心力,维持其转弯运行。当转弯速度过大时,则有侧翻风险。由文献[9-10]可知:
(1)
G=mg;
(2)

(3)
式中:Q为向心力,N;G为重力,N;L为轴距,m;M为前轴主销中心距,m;v为车速,km/h;R为质心处转弯半径,m;m为质量,kg;g为重力加速度,m/s2;θ为外转向轮转角,rad。
车辆发生侧翻的条件[9]为:

(4)
式中:H为重心高度,m;B为转向轮轮距,m。
由式(1)~式(4)可得货车发生侧翻的临界速度为:

(5)
式中,v0为货车侧翻速度,km/h。
由式(5)可知:在弯道行驶时,如果车速超过临界速度v0则会发生侧翻。虽然侧翻为短暂的不稳定状态,但却会导致车毁人亡等不可挽回的损失。一般在车辆发生侧翻前已经发生侧滑,侧滑同样对车辆的安全性构成一定的威胁。因此,在弯道行驶时,必须减速慢行,将车速控制在一定的安全范围内。
2智能修正型弯道换挡规律
由上述分析可知:在货车行驶工况已经明确的情况下,输入外转向轮转角,由式(5)可得侧翻速度v0。代入车速计算公式[9]:

(6)
式中:r为驱动轮半径,m;n为发动机转速,r/min;ig为变速器传动比;i0为主减速器传动比。
整理后得出车辆弯道安全行驶变速器可用最小传动比为:

(7)
式中:ne为发动机额定输出转速,r/min;ig min为变速器可用最小传动比。

图1 货车弯道换挡修正逻辑图
将ig min与车辆变速器已有传动比相比较,选取最接近ig min所对应的挡位为安全行驶可用最大输出挡位的初定值。同时,将雨雪天气、特殊地形等外部环境因素对安全行驶的影响加以考虑,最终可确定出转向轮一定转角下对应的安全行驶可用最大挡位。当货车弯道行驶车速大于安全车速时,则调用安全行驶可用最大挡位,直至弯道运行阶段结束;当车速处于安全范围之内,则原挡位保持不变。换挡修正控制逻辑如图1所示。
由于环境因素比较复杂,很难建立精确的数学模型来指导换挡规律。因此,可以通过模糊控制的方法,建立以转向轮转角和外界综合环境因素为输入量,变速器可用最大挡位为输出量的双输入单输出型模糊控制器[11]。以此模糊控制器对传统换挡规律进行修正。
根据需要,控制器输入输出量的语言集分别为:
转向轮转角θ:{很小(VS)、小(S)、中(M)、大(B) }。
环境因素e:{良好(G)、中(M)、差(B)、极差(VB)}。
可用最大挡位g:{高(H)、中(M)、低(L)、很低(VL)}。
当论域中元素总数为模糊子集总数的2~3倍时,模糊子集对论域的覆盖程度较好[12]。根据这一原则,输入输出量的论域设置如下:
Xθ:{0,1,2,3,4,5,6,7,8,9,10};
Xe:{0,1,2,3,4,5,6,7,8,9,10};
Yg:{0,1,2,3,4,5,6,7,8}。
然后,利用三角梯形隶属法分别对θ、e、g建立隶属函数,结果如图2所示。
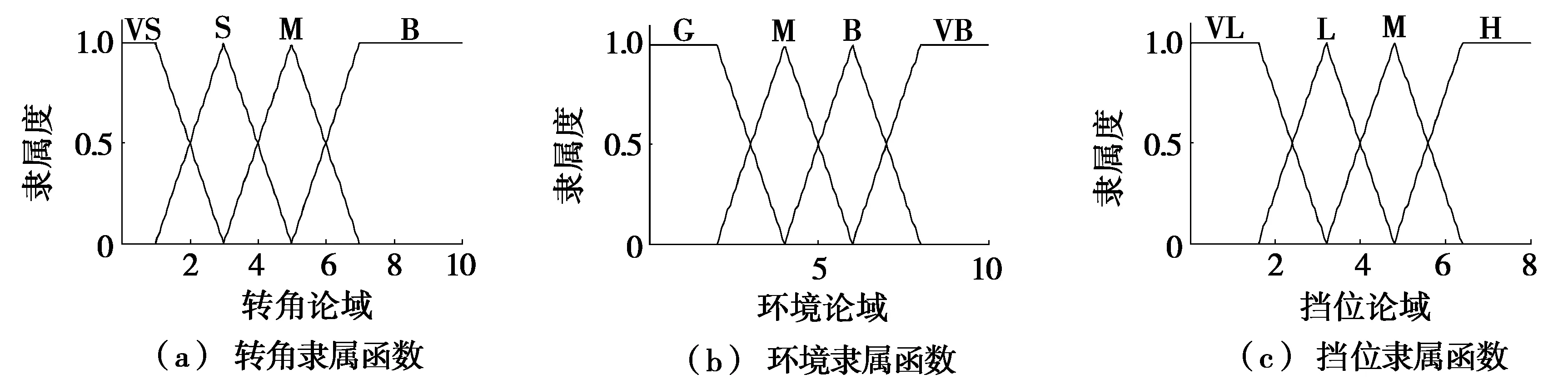
图2 各变量隶属函数图

转向轮转角综合环境状况GMBVBVSHHMMSMMSSMSSVSVSBVSVSVSVS
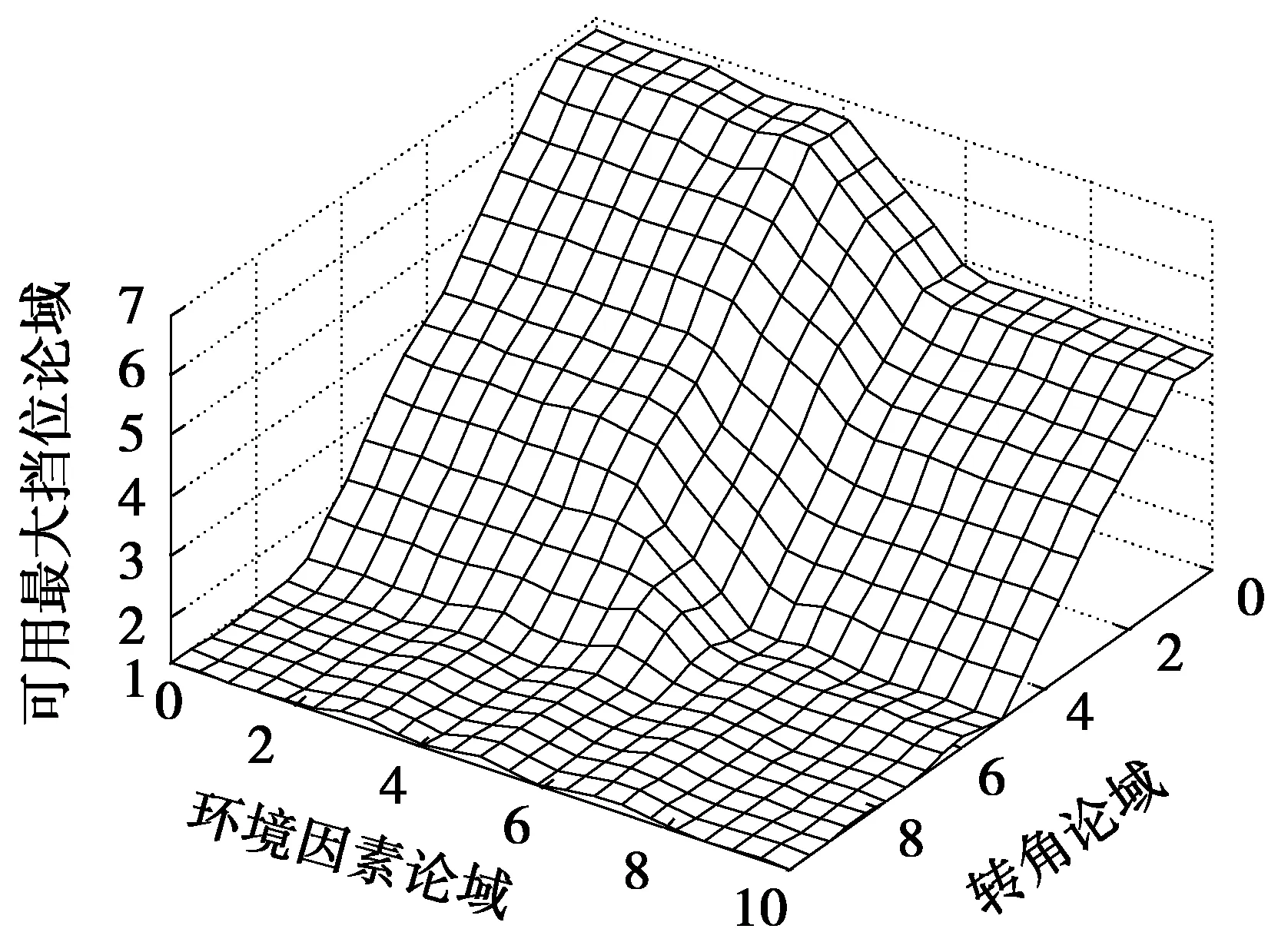
图3 换挡曲面
根据式(7),考虑环境因素并结合优秀驾驶员的经验可得安全行驶条件下可用最大挡位。将各工况下可用最大挡位汇总,可得如表1所示的模糊控制换挡规则库。根据换挡规则库可制得模糊控制器。控制器弯道换挡控制曲面如图3所示。将制得的模糊控制器嵌入换挡模块内,实现对货车弯道行驶时挡位的控制。
3换挡规律的仿真验证
为验证本模糊控制器对轻型货车弯道行驶安全性的改进效果,本文以某轻型货车在弯道运输为例,采用自动变速器,运用Matlab/Simulink软件进行安全性换挡仿真,并与传统三参数(车速、油门开度和加速度)换挡规律进行对比。货车相关参数取值见表2,传动比取值[13]见表3。选取运输环境为一般,转向轮转角为小转角,仿真以中速较大油门在道路运输为例,其中5~15 s为弯道转弯阶段,其余时间为直道行驶阶段。

表2 某货车相关参数

表3 某货车传动比
仿真结果如图4和图5所示,图4为挡位对比图,图5为车速对比图。仿真结果表明:在直道行驶阶段,修正规律和传统换挡规律对挡位与车速的控制基本一致;当进入弯道后,修正规律根据环境和转向轮转角的大小,有效控制挡位,平均降低车速11.6 km/h,预防了侧翻事故的发生。相比传统换挡规律,弯道换挡修正规律不仅继承了传统换挡规律的一些优点,而且可智能地识别弯道,提高了车辆行驶的安全性。

图4 换挡曲线对比图图5 车速对比图
4结论
(1)通过对车辆弯道运动状态进行分析,得出弯道行驶安全性与车身结构、转向轮转角以及环境因素的关系。当车辆重心越高、轴距越小、转向轮转角越大、环境越差时,则弯道行驶时侧翻的风险就越大;反之,风险则较小。
(2)设计了弯道换挡模糊控制器,对传统换挡规律进行修正,既继承了传统换挡规律的优点,又考虑了行驶的安全性。
(3)运用Matlab/Simulink软件,进行建模仿真,验证了安全性换挡修正规律的合理性。
参考文献:
[1]崔功杰.工程车辆三参数最佳换挡规律及控制方法的研究[D].长春:吉林大学,2009.
[2]候亮,官登.工程车辆的综合换挡规律研究[J].中国工程机械学报,2013,11(3):105-107.
[3]Sun Y Z,Xiong W,Yao Y F.Methods for the Gear-position Decision in AMT[J].Journal of Beijing Institute of Technology,2003,12(2):220-224.
[4]李强,师帅兵,柳和玲.拖拉机自动换挡规律研究[J].农业化研究,2012,34(5):221-223,227.
[5]鲍金锋.工程车辆新型三参数换挡规律的研究[D].长春:吉林大学,2011.
[6]杨伟斌,陈全世.智能修正型换挡规律的设计及在双离合器式自动变速器中的应用[J].机械工程学报,2009,45(1):205-209.
[7]Zhang Y,Chen X,Bang H,et al.Dynamic Modeling and Simulation of a Dual-clutch Automated Lay-shaft Transmission[J].Journal of Mechanical Design,Transactions of the ASME,2005,127(2):302-307.
[8]黄席樾,陈勇,向长城,等.汽车交通事故混沌分析及预测方法[J].控制与决策,2009,22(10):1128-1130.
[9]李旭.拖拉机汽车运输机组转弯时必须要限速慢行[J].广西农业机械化,1998,5(4):29-31.
[10]赵党社,魏玲霞.铰链式客车最小转弯半径和通道宽度的计算[J].客车技术与研究,2007,2(1):27-29.
[11]张彦会,廖抒华,刘婷婷,等.AMT自动换挡车辆行驶环境的模糊融合[J].拖拉机与农用运输车,2009,36(6):66-68.
[12]高爱云,付主木,张文春.拖拉机电控机式自动变速器模糊换挡策略[J].农业机械学报,2006,37(11):34-37.
[13]孙卫静.轻型货车变速器设计平台研发[D].武汉:武汉理工大学,2014.

