中国北方沿海典型澙湖—山东月湖水深遥感反演*
2016-01-15卢文虎杨红生宋肖跃顾瑞婷
赵 鹏 卢文虎 杨红生 宋肖跃 顾瑞婷 陈 哲
(1. 中国科学院海洋研究所 青岛 266071; 2. 中国科学院大学 北京 100049; 3. 国家海洋信息中心 天津 300171;4. 国家海洋环境预报中心 北京 100081)
潟湖是滨海湿地的重要类型之一, 受人类活动和自然因素影响, 澙湖地貌和生态系统往往持续处于动态调整中(孙伟富, 2013), 水深信息需要及时修测更新。通常 澙 湖水深较浅, 难以使用声学方法进行测量。遥感测深是一种间接的水深测量方法, 主要通过建立水深和水体辐射之间的相关关系对水深进行反演(于瑞宏等, 2009)。与直接测量相比, 具有覆盖面广、获取方便、费用低等优点, 在 获取 澙 湖等浅水水域水深信息方面显示出较大优势(陈鸣等, 2003)。
遥感水深反演的方法主要有解析法和统计法两种。其中, 统计法通过建立辐射亮度与实测水深之间的相关关系, 推知未知点的水深。该方法模型简单、反演精度较高、可操作性强, 应用最为广泛(李晋等,2015)。根据利用波段数量的不同, 统计法主要模型有:(1)单波段模型, Z=alnX+b; (2)双波段比值模型,Z=aln(Xi/Xj)+b; (3)多波段模型, Z=a0+a1lnX1+…+anlnXn。其中, Z为反演水深; X为波段, X=L-Ls, L为某单一波段的辐射亮度值, Ls为该波段在深水区对应的辐射亮度值; a、b为待定系数(叶小敏等, 2009)。
Clark等(1987)使用线性多波段模型从 TM 影像中提取了波多黎各别克斯岛附近海域水深; Mgengel等(1991)利用TM影像对荷兰近海水域进行了多时相水深提取。叶晓敏等(2009)在按水深分区的基础上使用TM影像反演了胶州湾20m以浅的水深。另有多名学者结合海域特点优化反演方法和模型取得了较好的结果(张鹰等, 2009; Song et al, 2011; 黄文骞等,2013)。Kanno等(2014)使用WorldView-2高分辨率卫星影像反演了珊瑚礁水域水深。目前, 多光谱遥感反演水深的精度在1—3m之间, 探测水深在30m以内。受水体透明度、底质类型等外界条件影响, 需针对特定海域构建相应的模型(庞蕾等, 2003)。此外, 对于底质类型复杂的海域, 需要根据底质类型分别进行水深反演以提高反演的精度(Lyzenga, 1978; 党福星等,2003; Dierssen et al, 2003; 杨顶田, 2007)。
山东月湖受清淤等人类活动影响, 地貌处于动态变化之中; 海域面积较小, 缺乏大比例尺海图; 有成片海草床, 底质类型复杂。目前, 此类水域水深实测和遥感反演研究均十分缺乏, 而 水深信息对于澙湖及海草床的保护十分重要。本研究实测水深并作经潮位校正, 选用高分辨率多光谱卫星影像, 建立各波段地表反射率与水深之间的相关关系, 选择相关性高的波段构建水深反演的单波段、波段比和多波段线性回归模型, 在划分底质类型的基础上选取反演精度最高的模型反演水深。
1 研究区域及实验数据
1.1 研究区域
研究区域是我国北方典型 潟 湖山东荣成月湖,面积约5km2, 水深0—2m, 是荣成大天鹅国家级自然保护区的核心区, 也是我国最大的大天鹅越冬栖息地。湖内盛产大叶藻、矮大叶藻等海草, 近年来硬毛藻和孔石莼等藻类在夏季暴发。月湖东部由荣成湾沙坝与外海隔开, 仅东南部有一宽约 80m的潮汐汊道与外海相通(魏合龙等, 1997)。
1.2 数据处理
(1) 实测水深数据。2015年 6月 7日, 使用Speedtech (SM-5)型便携式测深仪采集了46个站位相对深度。同时设立临时潮位站, 观测相对潮位变化情况, 建立潮位变化回归模型(R2=0.940)(图1)。使用该模型对相对水深进行校正, 获得处于同一水平面的绝对水深值。选择其中25个数据用于构建反演模型,剩余21个数据用于验证反演精度。
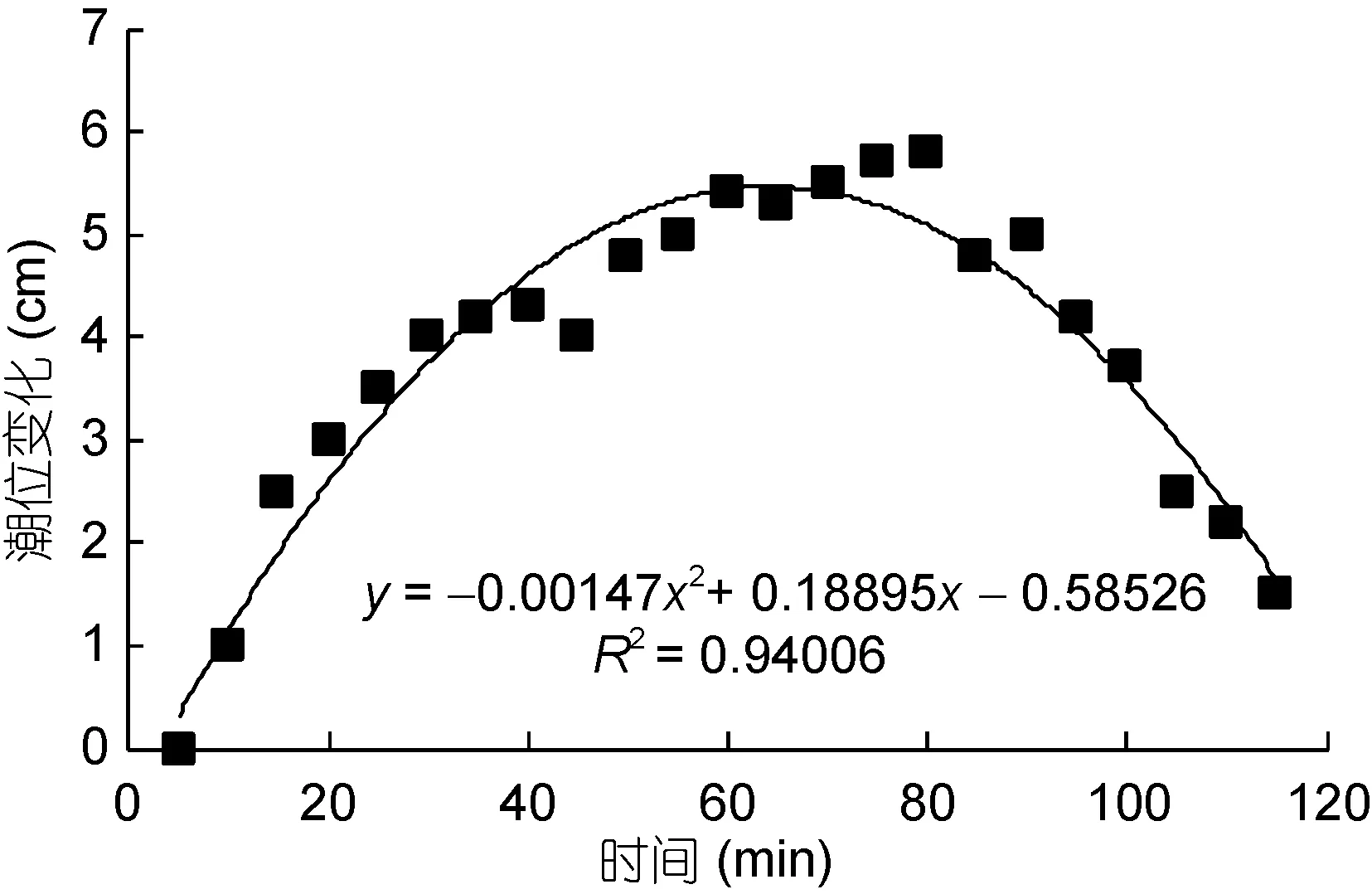
图1 潮位变化的回归模型Fig.1 The regressive model of tidal level change
(2) 遥感影像处理。卫星遥感影像是 2012年 8月22日IKONOS高分辨率卫星影像数据, 多光谱分辨率3.2m, 各波段参数见表1。对经初步几何校正和辐射校正的卫星影像进行大气校正、水陆分离、图像增强、提取光谱反射率等操作。
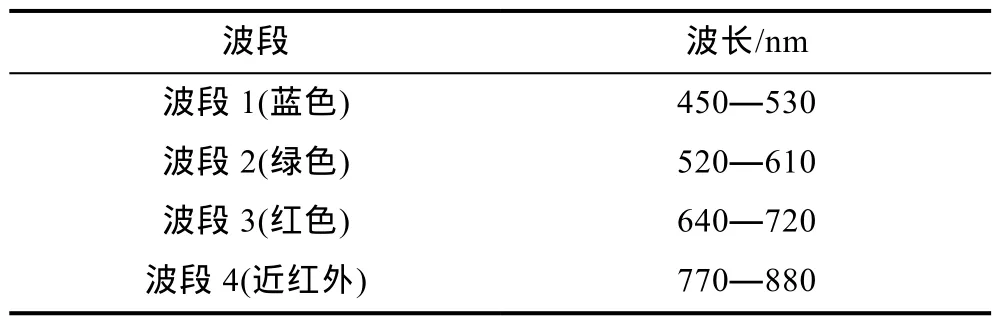
表1 IKONOS卫星多光谱参数Tab.1 Multi-spectral parameters of satellite IKONOS
大气校正。使用ENVI 5.1中FLAASH大气校正模块, 该模块基于MODTRAN5辐射传输模型, 不需要在遥感成像同步测量大气数据, 且算法精度高。利用卫星数据头文件获取太阳天顶角、太阳方位角、卫星天顶角、卫星方位角、成像时间、波谱响应函数等参数, 选取 Mid-Latitude Summer大气模型、Marine气溶胶模式, 通过对辐射传输过程进行模拟和假设,来推导地表真实反射率。
水陆分割。对水体进行分类, 使用光谱角法(SAM)提取水体和陆地信息, 并建立掩膜, 进行水陆分割(图 2)。
图像增强。与中低分辨率相比, 高分辨率影像受浪花、杂质等噪声影响更为显著。为减小这些因素的影响, 对IKONOS影像进行高斯7×7低通滤波平滑处理, 以增强影像信息。
2 水深反演
2.1 对水深敏感波段的选择
建立水深反演模型需要筛选出与水深相关性最高的波段或波段组合。本研究将实测水深点设置为感兴趣区域, 提取对应像元的四个波段地表反射率, 与经校正的水深值进行Pearson相关性分析。相关系分析结果(表2)表明, Band3、Band2反射率值与水深呈极显著负相关(P<0.01), Band1反射率值与水深呈显著负相关(P<0.05); 双波段比值中, Band2/Band1、Band3/Band1、Band3/Band2的值与水深呈极显著相关(P<0.01), 其中 Band3/Band1相关性系数最高, 可达-0.8。水深遥感的最佳波段为蓝、绿光波段, 而本研究中红光波段 Band3反射率值与水深的相关性最高, 这是因为在较为混浊的II类水体中, 波谱反射率峰值出现红移现象, 与前人研究结果一致(李晋等,2015)。
2.2 回归模型的构建和精度分析
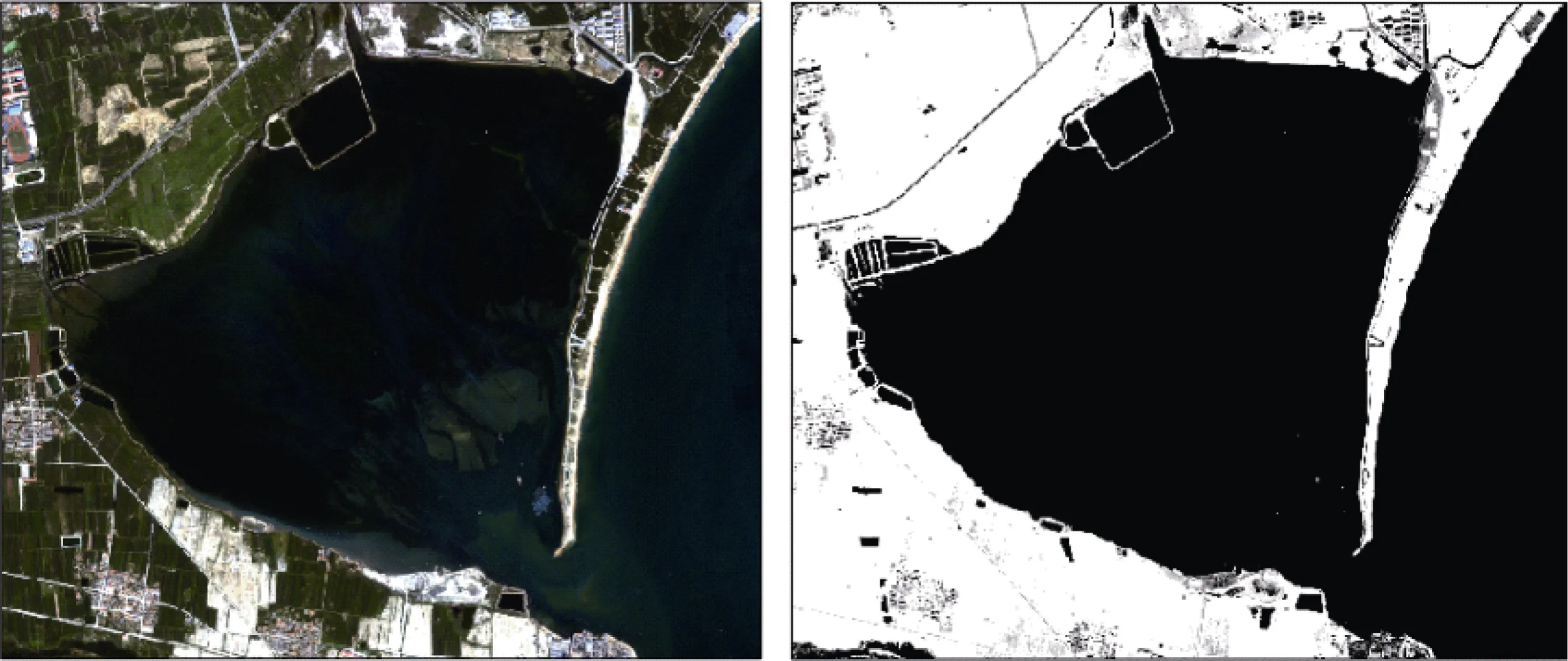
图2 水陆分割结果Fig.2 Separation of land from water
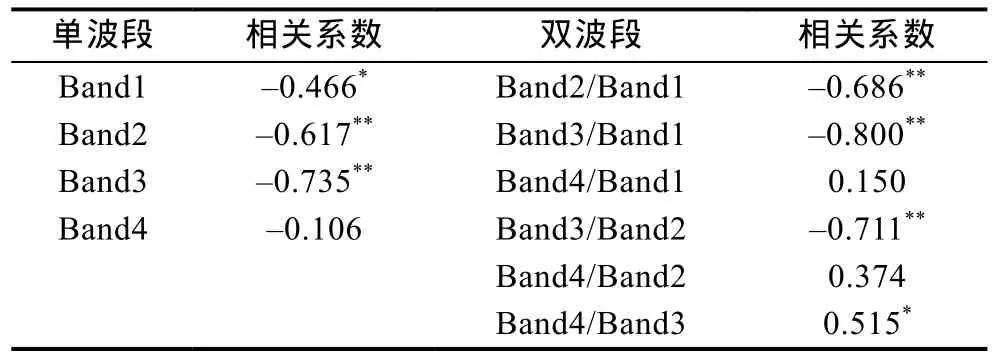
表2 水深值与各波段反射率及两波段反射率比值的相关性Tab.2 Correlation of water depth with reflectance of single band and the ratio of double bands
选择与水深相关性最高的Band3、Band3/Band1、Band3/Band2、Band2/Band1分别构建单波段模型、两波段比值模型和多波段模型, 在以月湖整体为对象进行线性回归分析的基础上, 根据月湖底质类型,将月湖划分为浅水区(Ⅰ区)、植被(Ⅱ区)、深水区(Ⅲ区)三部分(图 3), 分别进行线性回归分析。计算决定系数(R2)、均方根误差(RMSE)、平均绝对误差(MAE)和平均相对误差(MRE)表征各回归模型的反演精度和拟合效果。R2越大, RMSE、MAE、MRE越小, 模型的拟合效果越好。
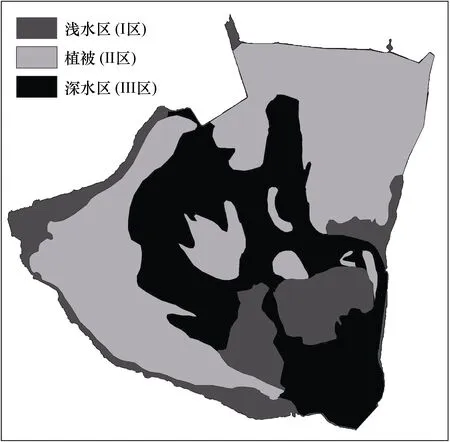
图3 底质分类Fig.3 Bottom classification
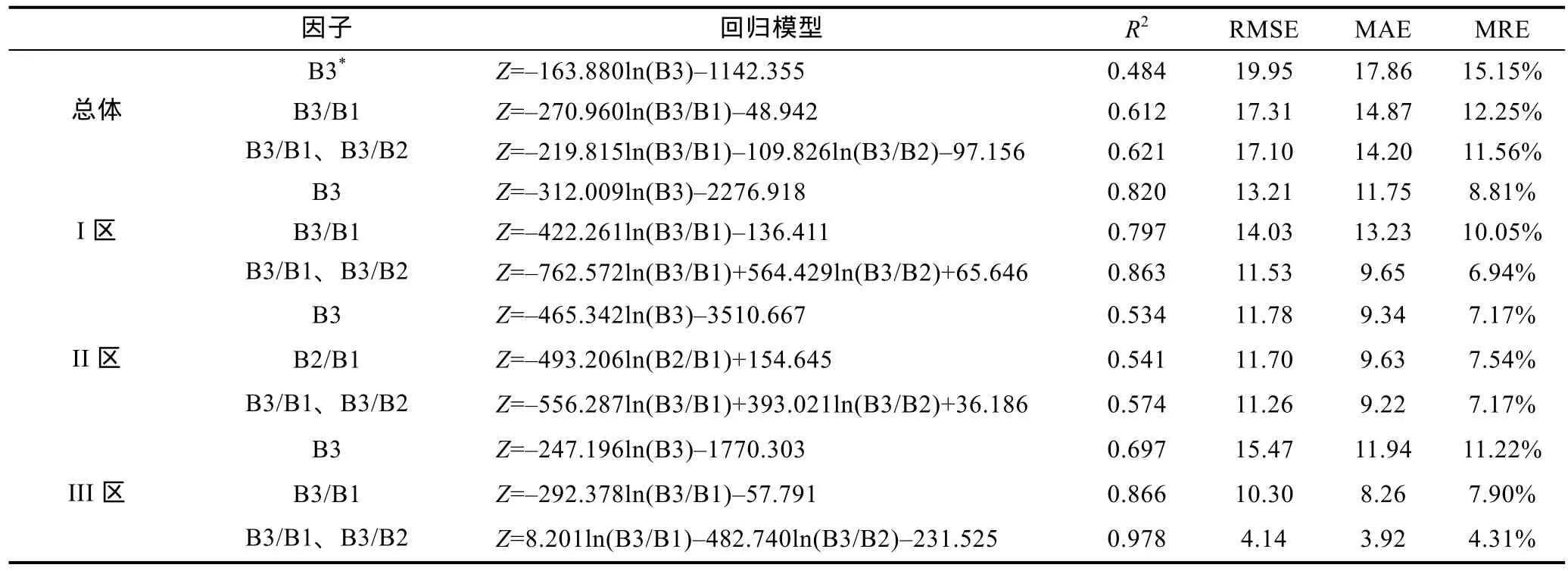
表3 线性回归模型及精度分析Tab.3 The results of regression analysis and the precision
线性回归分析表明(表 3), 分区进行线性回归的精度总体上优于对湖区整体进行线性回归。反演精度在无植被覆盖的Ⅰ区和Ⅲ区优于有植被覆盖Ⅱ区。多波段模型的精度最高, 两波段比值模型次之, 单波段模型最低。
2.3 反演结果及精度
使用对Ⅰ、Ⅱ、Ⅲ区拟合效果最好的多波段模型分别反演水深, 计算出各像元对应的水深值, 图层合并后去除坏点。对比验证点实测和反演水深, 可发现水深反演的平均绝对误差为 16.32cm, 平均相对误差为 13.16%, 单因素方差分析表明水深反演绝对误差值在三类区域之间没有显著性差异(P>0.05)。与相似海区相比反演结果精度较高。反演结果显示, 月湖最深处为月湖东南侧主水道, 最深处达271.23cm; 月湖全湖平均水深(67.92±63.50)cm; 月湖整体上较为平坦, 西岸、南岸形成较为平坦的滩涂, 北侧有残留的沙坝; 东北、西侧河口处形成三角洲; 湖区东南侧分布有涨潮三角洲; 主水道位于涨潮三角洲东侧, 牡蛎礁南侧。
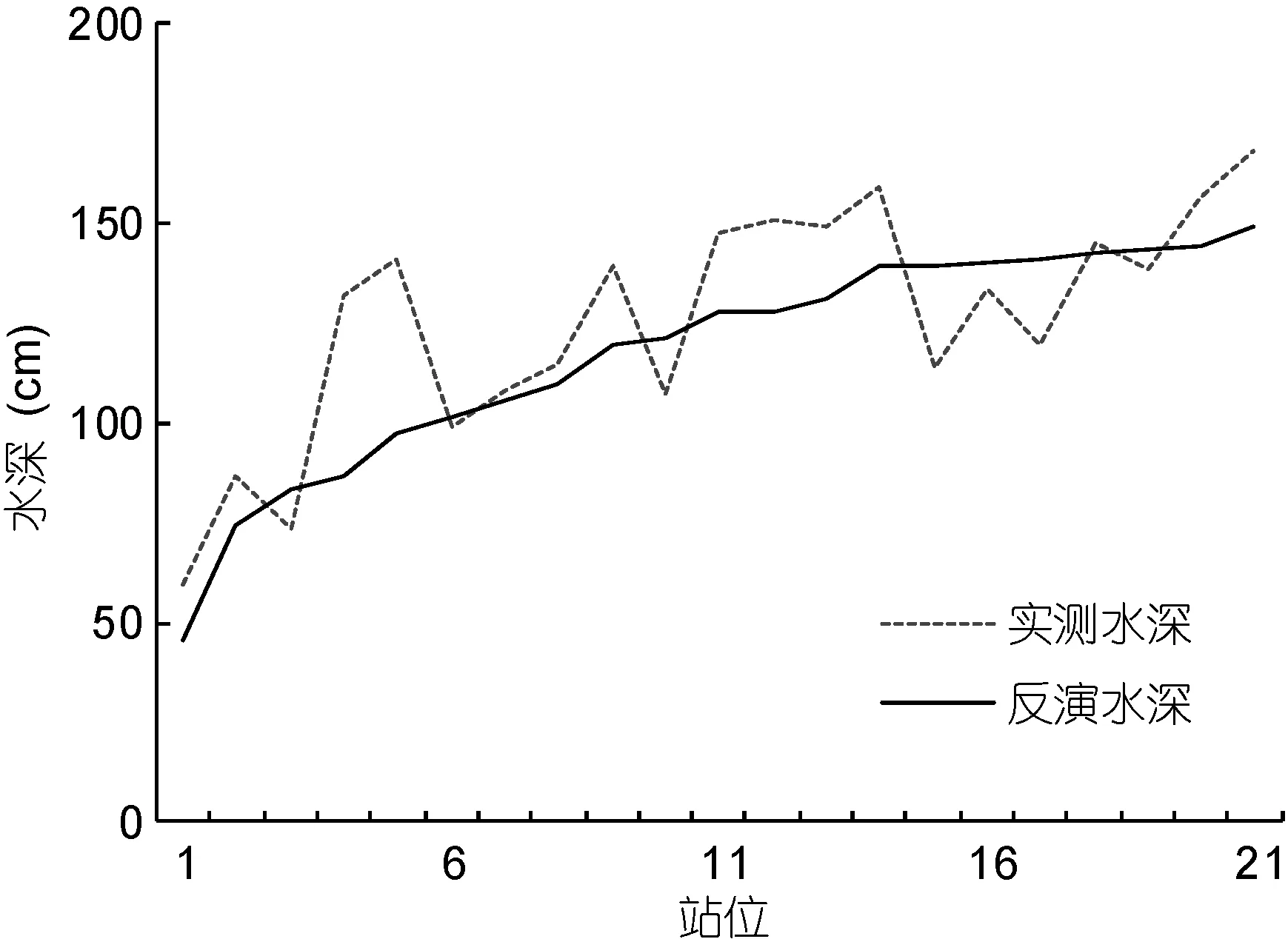
图4 反演与实测水深的比较Fig.4 Comparison between estimated and measured depths
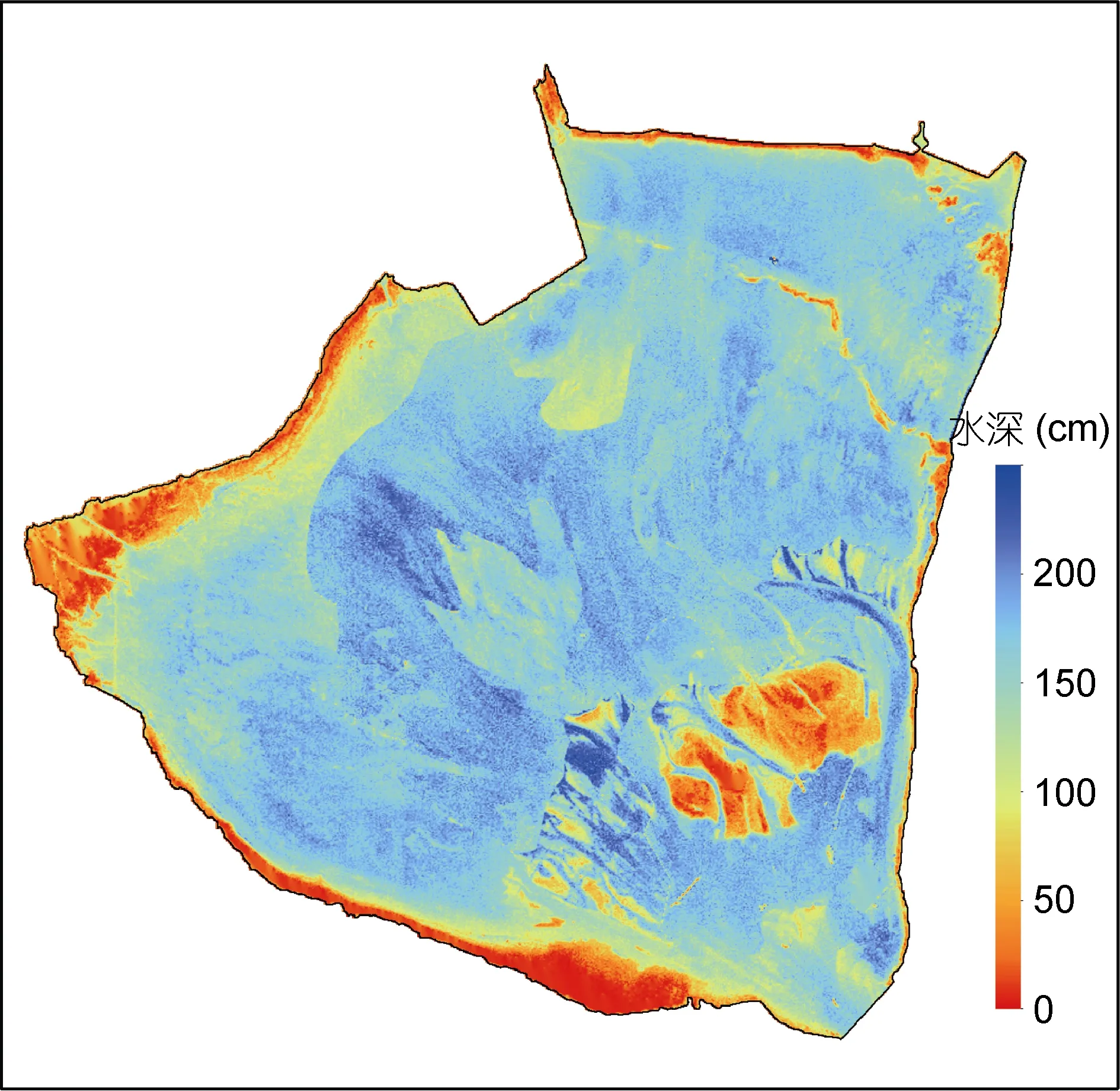
图5 反演月湖水深图Fig.5 The estimated depth of Yuehu lagoon
3 结论
卫星遥感是获得水深较浅、地貌频繁变化的 澙 湖水深的有效方法。对于月湖等小型 澙 湖而言,IKONOS等高分辨率卫星影像能够较为清晰地显示地貌细节。多波段线性回归模型比单波段和波段比模型反演精度更高。将湖区划分为浅水区、植被、和深水区在一定程度上削弱了由于水质和底质不均匀引起反演模型误差, 有效提高了水深反演的精度。
致谢 马山集团王厚荣参加野外调查与测量工作,在此致谢。
于瑞宏, 许有鹏, 刘廷玺等, 2009. 应用多光谱遥感信息反演干旱区浅水湖泊水深. 水科学进展, 20(1): 111—117
叶小敏, 郑全安, 纪育强等, 2009. 基于 TM 影像的胶州湾水深遥感. 海洋测绘, 29(2): 12—15, 19
孙伟富, 2013. 我 国海岸 澙 湖 遥感监测与典型 澙 湖分析. 青岛:中国海洋大学博士学位论文
李 晋, 田洪军, 徐文斌等, 2015. 渤海湾近岸海域水深遥感反演研究. 测绘科学, 40(6): 56—60
杨顶田, 2007. 不同底质类型对卫星遥感提取水深信息精度的影响. 见: 中国海洋学会海洋工程分会. 第十三届中国海洋(岸)工程学术讨论会论文集. 南京: 中国海洋学会海洋工程分会
张 鹰, 张 芸, 张 东等, 2009. 南黄海辐射沙脊群海域的水深遥感. 海洋学报, 31(3): 39—45
陈 鸣, 李士鸿, 孔庆芬, 2003. 卫星遥感长江口水域水深.水利水运工程学报, (2): 61—64
庞 蕾, 聂志峰, 2003. 星载多光谱浅海水深测量方法. 山东理工大学学报(自然科学版), 17(6): 59—61
党福星, 丁 谦, 2003. 利用多波段卫星数据进行浅海水深反演方法研究. 海洋通报, 22(3): 55—60
黄文骞, 吴 迪, 杨 杨等, 2013. 浅海多光谱遥感水深反演技术. 海洋技术, 32(2): 43—46
魏合龙, 庄振业, 1997. 山 东荣成湾月湖地区的 潟 湖-潮汐汊道体系. 湖泊科学, 9(2): 135—140
Clark R K, Fay T H, Walker C L, 1987. A comparison of models for remotely sensed bathymetry. AD-A197 973
Dierssen H M, Zimmerman R C, Leathers R Aet al, 2003. Ocean color remote sensing of seagrass and bathymetry in the Bahamas Banks by high-resolution airborne imagery.Limnology and Oceanography, 48(1): 444—455
Kanno A, Tanaka Y, Shinohara Ret al, 2014. Which spectral bands of worldview-2 are useful in remote sensing of water depth? A case study in coral reefs. Marine Geodesy, 37(3): 283—292
Lyzenga D R, 1978. Passive remote sensing techniques for mapping water depth and bottom features. Applied Optics,17(3): 379—383
Mgengel V, Spitzer R J, 1991. Application of remote sensing data to mapping of shallow sea-floor near by Netherlands.International Journal of Remote Sensing, 57(5): 473—479
Song G H, Xu Y P, Song G H et al, 2011. Study on water depth extraction in Jiangsu Coastal zone using Landsat ETM+images. In: Proceedings of the International Conference on Remote Sensing, Environment and Transportation Engineering.Nanjing: IEEE, 5435—5438
