投球机器人模糊P ID控制
2016-01-15赵新华,王璞,陈晓红
网络出版地址:http://www.cnki.net/kcms/detail/23.1538.tp.20150603.1623.002.html
投球机器人模糊PID控制
赵新华1,王璞1,陈晓红2
(1.哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001; 2.哈尔滨船舶锅炉涡轮机研究所,黑龙江 哈尔滨 150036)
摘要:针对智能投球机器人在轨迹跟踪过程中存在响应慢、跟踪精度低的问题,采用PID控制和模糊PID控制2种控制方法提高系统的响应速度及控制精度。对二连杆投球机器人进行了详细的运动学建模,建立了机械臂的动力学模型,联立得约束矩阵方程;然后分别选用PID控制和模糊PID控制对二连杆投球机器人运动轨迹进行控制。在MATLAB环境下利用SimMechanics对系统数学模型和2种控制方案进行仿真,数值实验结果表明,模糊PID控制具有更好的控制效果。
关键词:机器人;投球机器人;PID;模糊PID;动力学模型;约束矩阵;轨迹跟踪
DOI:10.3969/j.issn.1673-4785.201404041
中图分类号:TP18 文献标志码:A
收稿日期:2014-04-22. 网络出版日期:2015-06-03.
基金项目:黑龙江省博士后科研启动基金资助项目(3236310224).
作者简介:
中文引用格式:赵新华,王璞,陈晓红. 投球机器人模糊PID控制[J]. 智能系统学报, 2015, 10(3): 399-406.
英文引用格式:ZHAO Xinhua, WANG Pu, CHEN Xiaohong. Fuzzy PID control of pitching robots[J]. CAAI Transactions on Intelligent Systems, 2015, 10(3): 399-406
Fuzzy PID control of pitching robots
ZHAO Xinhua1, WANG Pu1, CHEN Xiaohong2
(1. College of Automation, Harbin Engineering University, Harbin 150001, China; 2. Harbin Marine Boiler and Turbine Research Institute, Harbin 150036, China)
Abstract:The PID and fuzzy PID controls were exploited to improve the control performance of the system for solving the problems of the slow response and low accuracy in the trajectory tracking of the pitching robot. Kinematics modeling of a dual-arm pitching robot was built. The dynamic model of the robotic arm was established and the constraint matrix equation was obtained by simultaneous equations. The PID and fuzzy PID controls were selected to control the trajectory of the dual-arm pitching robot. The mathematical model of the system was simulated using SimMechanics and the comparison of the two kinds of control schemes was completed using MATLAB. The numerical simulation results showed that the fuzzy PID control has a better effect.
Keywords:robot; pitching robot; PID; fuzzy PID; dynamics model; constraint matrix; trajectory tracking

通信作者:赵新华. E-mail: zhaoxinhua@hrbeu.edu.cn.
智能投球机器人是一个由微处理器控制,集环境感知、避障、行走、投球等功能于一体的智能机器人。对于投球机器人来说,运动控制的目的就是使之能精确并且快速地实现机械臂转角运动。传统的机器人运动控制常采用PID控制器[1]。由于各种干扰因素,机器人的运动具有时变、非线性、干扰大和不确定等特性,传统的PID控制器已不能达到较好的控制效果[2]。近几年,机器人智能控制在理论和应用方面都取得较大的进展[3]。在模糊控制方面,由J. J. Buckley等论证了模糊系统的逼近特性[4],E. H. Mamdan首次将模糊理论运用于一台实际机器人,使模糊控制技术在机器人中的应用得以展现[5]。文献[6]针对移动机器人在传统控制器控制下自主运动时出现的不稳定状况,将模糊控制策略引入移动机器人运动控制系统中。通过分析比较不同的控制方法,设计了由速度误差率和速度误差变化率为输入、电机输出功率为输出的双输入单输出模糊逻辑控制器。文献[7]模仿人工预瞄驾驶行为,提出了移动机器人运动控制的模糊控制方法,实验表明,该模糊控制方法可保证移动机器人快速、准确地沿着各种参考轨迹行走,且具有良好的鲁棒性。文献[8]在智能轮椅机器人中使用超声波的探测距离作为输入信号,经模糊控制技术处理后,输出机器人左右轮的转动速度来实现超声波避障。
本文首先对二连杆投球机器人进行运动学建模,然后在此基础上对机器人的控制方法进行了研究,通过PID和模糊PID2种控制方法,实现二连杆投球机器人运动轨迹的有效控制,用MATLAB软件进行仿真,并对仿真结果进行对比分析。
1二连杆投球机器人的运动学建模
1.1二连杆机械臂
机械手臂是机器人重要构成部件。图1为二杆机械臂结构图,其中θ1和θ2分别为关节1、2转角,l1和l2分别为第1、2根杆的长度,r1为关节1到第1根杆质心的距离,r2为关节2到第2根杆质心的距离,Mpl为负载质量。
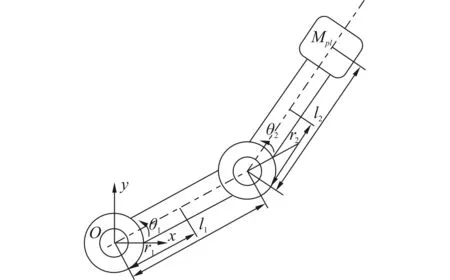
图1 二连杆机械臂结构 Fig. 1 Dual-arm mechanical structure
式(1)是二连杆机械臂的矢量方程,其中R1、R2是沿r1和r2方向上的矢量,Rpl为合成矢量。由于在二连杆机械臂中,各连杆的长度保持不变,但它们各自的方位却随机构的运动而改变,所以矢量方程对时间求导将闭环矢量方程分解成2个标量表达式,分别沿x、y方向分解。
(1)
Rpl相应于x和y的坐标方程为
(2)
(3)
对末端坐标进行积分得到末端速度方程:
(4)
(5)

(6)
式中:S1=sinθ1,C1=cosθ1,S2=sinθ2,C2=cosθ2,S12=sin(θ1+θ2),C12=cos(θ1+θ2)。
对二连杆机械臂末端速度方程(3)~(4)进行求导得到末端加速度方程:
(7)
(8)
式中:α1=θ″1,α2=θ″2,二连杆机械臂质心位置的加速度与关节处的变量之间关系如下:
(9)
(10)
(11)
分别对机械臂两连杆的隔离体[10]进行力及力矩的分析,求得机械臂的动力学方程。
1.2机械臂动力学方程
首先,对二连杆平面投球机器人的第1根连杆应用牛顿定律[11],受力分析如图2所示。

图2 第1根连杆受力分析 Fig. 2 The first arm force analysis
图2中,F01x、F21x分别代表第1根杆2端所受x方向的力,F01y、F21y分别代表第1根杆2端所受y方向的力,M1为第1根杆的质量,τ1、τ2分别为关节1和关节2的控制力矩。
由图2可以推导出机械臂第1杆的运动方程:
(12)
(13)
(14)
其次,对二连杆机械臂的第2根连杆进行受力分析,如图3所示。
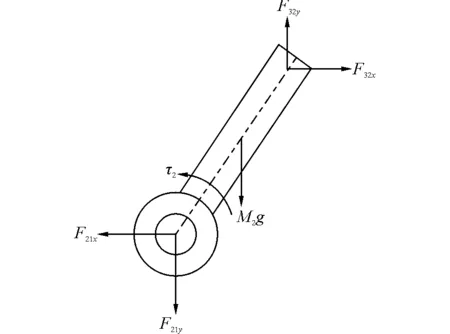
图3 第2根连杆受力分析 Fig. 3 The second arm force analysis
图3中,F21x为第2根杆2端所受x方向的力,F21y为第2根杆2端所受y方向的力,M2为第2根杆的质量,F32x为第2根杆所受x方向的力,F32y为第2根杆所受y方向的力。第2根杆的3个运动方程为:
(15)
(16)
(17)
作用在机器人上的有效载荷的变化直接与2个连杆相联系,因此可将其与连杆一起表示,如图4所示。其中F32x为末端所受x方向的力,F32y为末端所受y方向的力,Mplg为负载的质量。

图4 负载受力分析 Fig. 4 Load force analysis
有效载荷的质量是由二连杆机械臂举起的重物所决定的,将加载物视为集中质量,可以得到以下方程:
(18)
将2个关节电机输入转矩作为输入,联立运动约束方程(6)~(10)和运动学方程(11)~(18),推导出约束矩阵方程(19):

(19)
式中:
2二连杆投球机器人的控制方法
分别采用PID控制和模糊PID控制对二连杆投球机器人进行运动轨迹控制。
2.1PID控制
PID控制策略其结构简单、稳定性好、可靠性高[12]。式(20)为PID控制标准公式,其中U(t)为PID控制器输出,Kp为比例放大系数,Ti为积分常数,Td为微分放大系数,e为偏差信号。
(20)
PID参数设置:首先确定比例增益Kp,而后确定积分时间常数Ti,最后确定微分时间常数Td,通常为0即可。
2.2模糊PID控制
2.2.1模糊控制基本原理
模糊控制的核心是模糊控制器,而模糊控制器的关键是模糊控制规则的确定,即模糊控制规则表[13]。模糊控制系统框图如图5所示,把误差e及其变化率ec作为模糊控制器的输入,把控制量u作为模糊控制器的输出,得
(21)
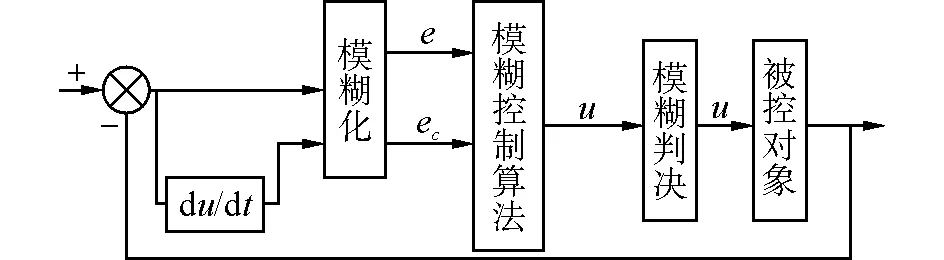
图5 模糊控制器基本结构 Fig. 5 The basic structure of the fuzzy controller
2.2.2输入量的模糊化
精确输入量e和ec分别乘以量化因子ke和kec以转换到各自的论域范围。设模糊控制器的输入量标准域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。输入量论域划分成7个模糊子集,即{NB,NM,NS,ZO,PS,PM,PB}。模糊子集的隶属函数采用高斯函数,函数曲线如图6所示。
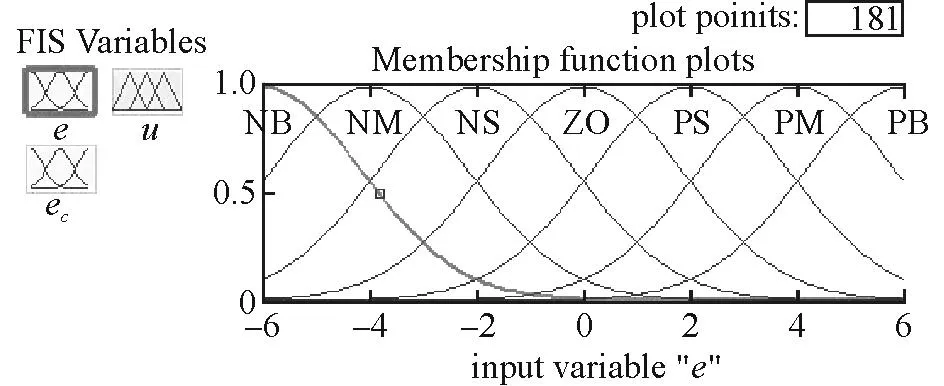
图6 隶属函数曲线 Fig. 6 Membership functions curve
2.2.2输入量的模糊化
规则选取的总体原则是:当误差较大时,选择控制量以消除误差为主;当误差较小时,选择控制量要防止超调,以系统的稳定性为主。
输出变量与输入变量取一样的模糊子集,即u={NB,NM,NS,ZO,PS,PM,PB},同样采用高斯隶属函数。e和ec分别定义为7个模糊子集、49条规则,如表1所示。

表 1 u的模糊控制规则
3 系统仿真
3.1动力学仿真
根据二连杆机械臂在重力作用下的受力情况,如果让机器人从任何初始位置开始运动,将输入的值设置为零,那么二连杆机械臂将在自身重力作用下下落,最后到达2个连杆都在一条铅垂线上的位置。参考图1中节点角的定义,此时相应的节点角度θ1=-π/2和θ2=0。表2给出二连杆平面机器人的惯性参数和几何参数。
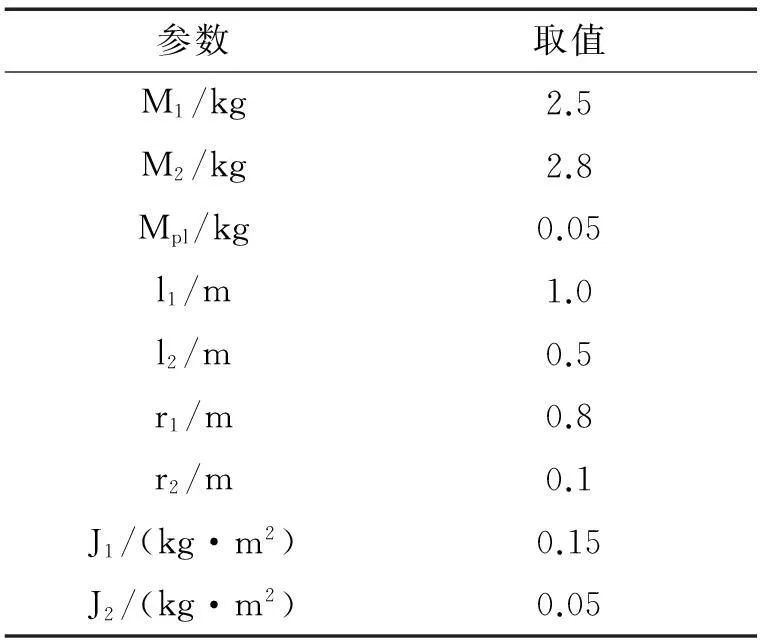
表 2 二连杆机器人的惯性参数和几何参数
图7是一个Simuarm模型[14]的原理框图。仿真调用robot.m来求解联立约束矩阵,采用一种线性摩擦力模型,在该模型中,抵抗输入扭矩的摩擦力矩与转速成正比。2个标“Damping”的增益模块表示由于轴承和电动机的粘滞阻尼而产生的速度损失。
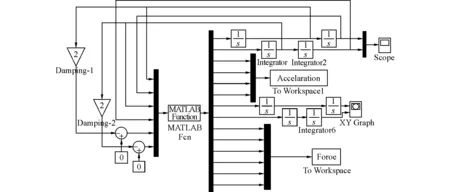
图7 两连杆机器人的Simuarm仿真模型 Fig. 7 Simuarm simulation model of dual-arm robot

图8 关节转角θ 1和θ 2的变化曲线 Fig. 8 Curve of joint angle θ 1 and θ 2
仿真初始条件:θ1=0和θ2=-π/2,末端位置:xpl=1.0,ypl=0.8,与此同时,积分求解器的初始条件也是相容的。仿真结果如图8所示。图8给出了关节转角θ1和θ2的转角曲线,在经过一定的仿真时间后,二连杆机械臂运动趋于稳定,θ1为-π/2,θ2为0,与机械臂在自重下试验姿态相吻合。
3.2PID控制仿真
在对二连杆机械臂进行建模与仿真基础上加入PID控制模块来控制各个节点电动机的位置,控制二连杆机械臂无震荡的从一个节点快速移动到另一个节点。选择Simarm中的SimMechanics工具箱进行PID控制及模糊PID控制的仿真。
3.2.1控制模型
图9为二连杆投球机器人的SimMechanics仿真图[15]。Ground为机架模块,barAB、barBC代表第1、2根杆,A、B分别代表转动副模块,Joint Sensor1代表运动副传感器模块,Joint Actuator为运动驱动模块。
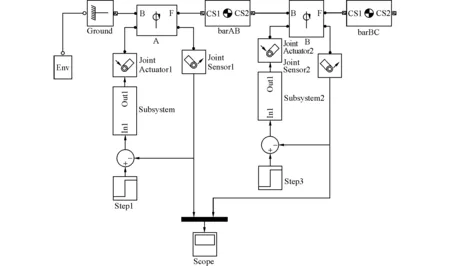
图9 二连杆机器人仿真框图 Fig. 9 Simulation block of dual-arm robot
3.2.2PID控制仿真

仿真模型建立后,要对每个模块都进行参数的设置。以AB杆为例,见图10。双击barAB,填入参数:杆的质量、刚体坐标和质心位置。所有参数设置完成后,再设置允许每个连杆的旋转角度。在此,设置第1根杆旋转90°,第2根杆旋转135°。
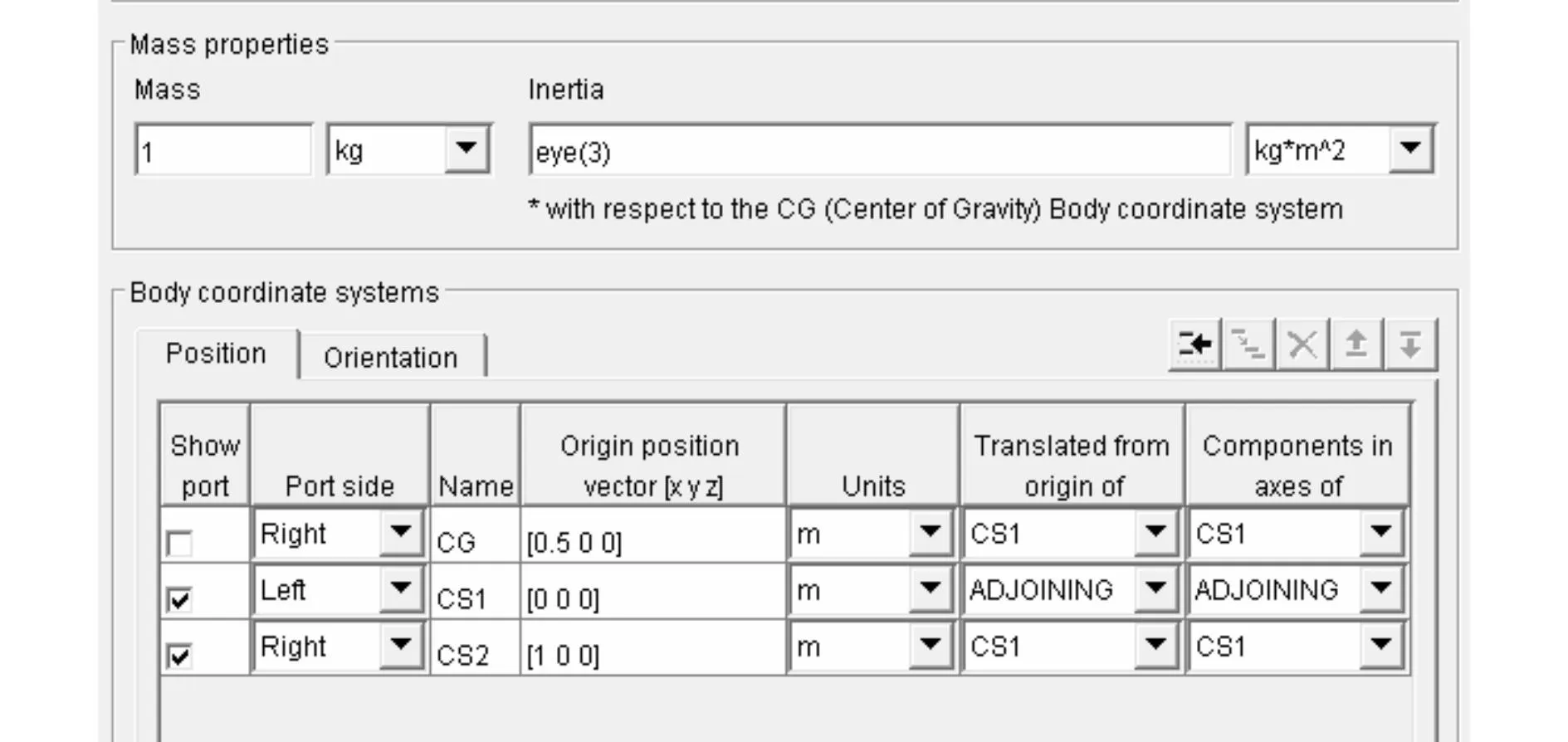
图10 AB杆模型参数 Fig. 10 Model parameters of AB arm
得到二连杆机械臂的旋转角度曲线,根据上节所述方法调节PID参数,得到理想的响应曲线。图11为经过PID调节后二连杆平面投球机器人的旋转角度情况。可以看到,经过PID调节后,系统可以实现快速启动,并且缩短了时间,快速地进入新的稳定状态。
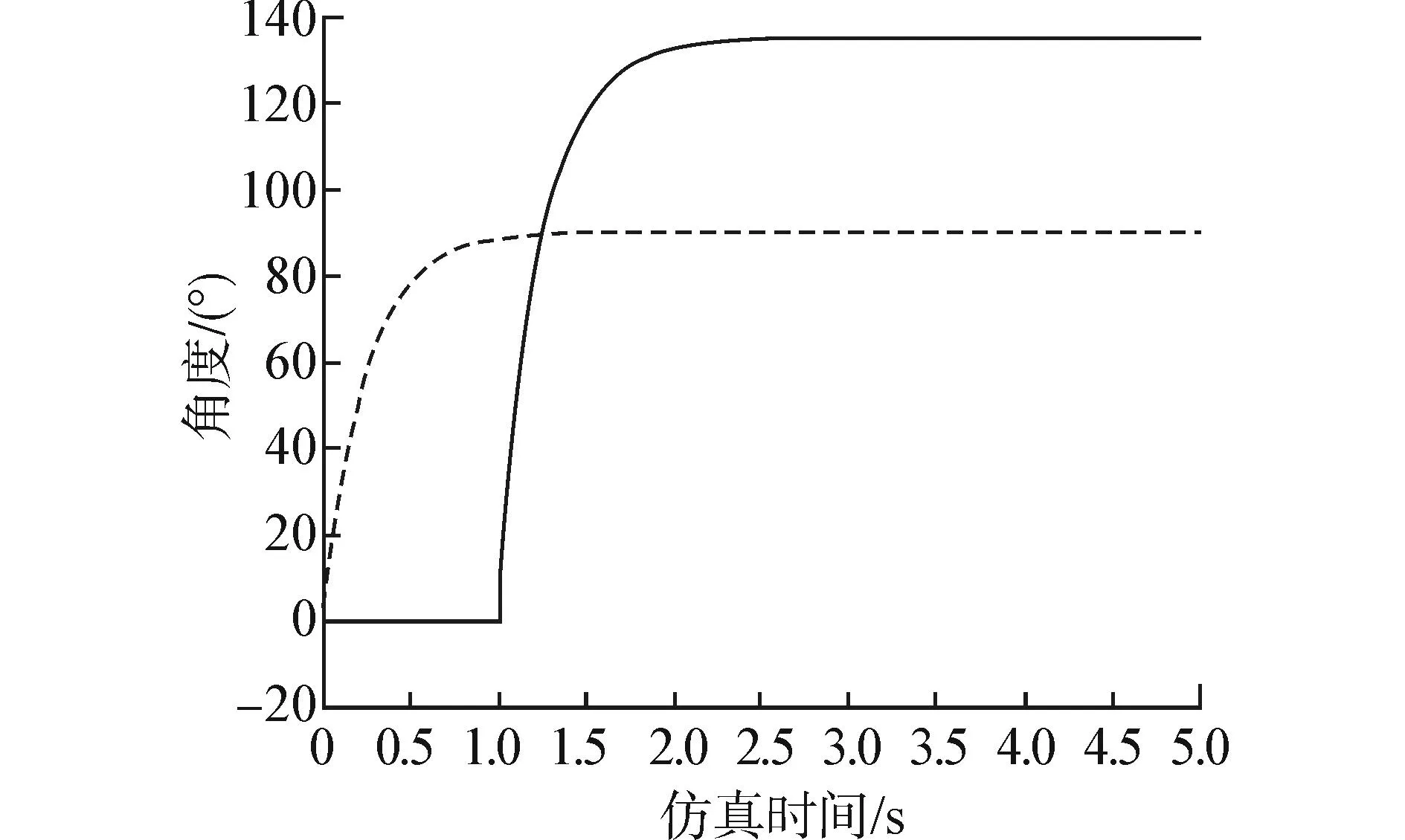
图11 两连杆机械臂旋转角度 Fig. 11 Rotation angle of dual-arm
3.3模糊PID控制仿真
通过SimMechanics建立仿真模型,并利用模糊PID进行控制[17]。如图12所示。启动仿真,调节模糊PID参数。从仿真曲线可以看到PID控制与模糊PID控制两者之间的差别。图13为启动仿真后得到的第1根杆旋转角度的完整图,图14为图13的局部放大图。图15为第2根杆旋转角度的完整图,图16为图15的局部放大图。从图14和图16两根杆旋转角度的局部放大图可以看到,模糊PID控制要比PID控制的定位更加精确。

图12 第1、2根杆模糊PID模块 Fig. 12 Fuzzy PID block of the first and second arm

图13 第1根杆旋转角度完整图 Fig. 13 The complete graph of the first arm rotation angle

图14 第1根杆旋转角度局部放大图 Fig. 14 Partial enlarged drawing of the first arm rotation angle
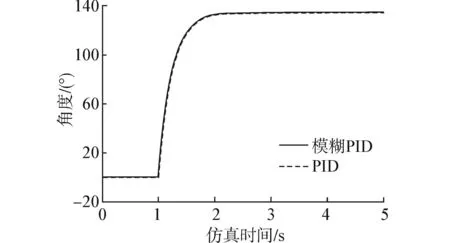
图15 第2根杆旋转角度完整图 Fig. 15 The complete graph of the second arm rotation angle
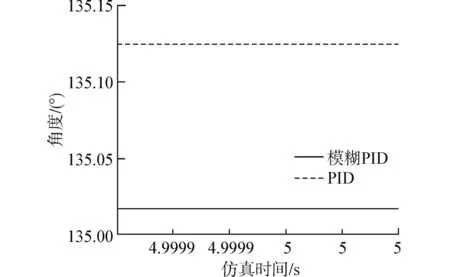
图16 第2根杆旋转角度局部放大图 Fig. 16 Partial enlarged drawing of the second arm rotation angle
4结束语
通过对二连杆投球机器人运动学方程和动力学方程的推导,得到了二连杆投球机器人的动态数学模型,此建模过程简单、方便、有效,便于进行动力学分析和控制问题的研究。把得到的二连杆投球机器人的数学模型嵌入到MATLAB仿真中,得到二连杆机器人的运动情况,并在仿真过程中加入了PID模块和模糊PID模块,仿真结果得出模糊PID控制精确性更高。本设计仅对二连杆投球机器人进行了建模与仿真,下一步将对整体系统进行进一步的研究。
参考文献:
[1]范永, 谭民. 机器人控制器的现状及展望[J]. 机器人, 1999(1): 75-80.
FAN Yong, TAN Min. Current state and tendencies in the development of robot controller[J]. Robot, 1999(1): 75-80.
[2]张锐, 吴成东. 机器人智能控制研究进展[J]. 沈阳建筑工程学院学报:自然科学版, 2003, 11(1): 61-65.
ZHANG Rui, WU Chengdong. Some recent progress in robotic intelligent control[J]. Journal of Shenyang Architectural and Civil Engineering Institute, 2003, 11(1): 61-65.
[3]蔡自兴, 陈海燕, 魏世勇. 智能控制工程研究的进展[J]. 控制工程, 2003, 10(1): 15-20.
CAI Zixing, CHEN Haiyan, WEI Shiyong. Recent advances in research of intelligent control engineering[J]. Control Engineering of China, 2003, 10(1): 15-20.
[4]贾玉赞. 浅议智能机器人发展及应用[J]. 太原科技, 2003, 5(3): 20-26.
JIA Yuzan. Development of intellectual robot and its application[J]. Taiyuan Science and Technology, 2003, 5(3): 20-26.
[5]吴向阳, 戴先中, 孟正大. 分布式机器人控制器体系结构的研究[J]. 东南大学学报:自然科学版, 2003, 33(Supl.): 200-204.
WU Xiangyang, DAI Xianzhong, MENG Zhengda. Research on distributed architecture of robot controller[J]. Journal of Southeast University: Natural Science Edition, 2003, 33(Supl.): 200-204.
[6]谭宝成, 程智远, 牟云霞, 等. 移动机器人模糊控制系统的设计[J]. 西安工业大学学报, 2007, 27(4): 366-370.
TAN Baocheng, CHENG Zhiyuan, MOU Yunxia, et al. Design of mobile robot control system based on fuzzy control[J]. Journal of Xi’an Technological University, 2007, 27(4): 366-370.
[7]李庆中, 顾伟康, 叶秀清, 等. 移动机器人模糊控制方法研究[J]. 仪器仪表学报, 2002, 23(5): 480-484.
LI Qingzhong, GU Weikang, YE Xiuqing, et al. Study on fuzzy control method for mobile robots[J]. Chinese Journal of Scientific Instrument, 2002, 23(5): 480-484.
[8]李余庆, 刘继忠, 张华. 模糊控制在机器人超生避障系统的应用[J]. 机器人技术, 2009, 25(52): 216-218.
LI Yuqing, LIU Jizhong, ZHANG Hua. Application of fuzzy control in ultrasound obstacle avoidance system for robot[J]. Robot Technology, 2009, 25(52): 216-218.
[9]樊晓平, 徐建闽. 柔性机器人的动力学建模及其仿真[J].控制理论与应用, 1997, 5(6): 60-69.
FAN Xiaoping, XU Jianmin. Dynamic modeling and simulation of flexible robotic manipulators[J]. Control Theory and Applications, 1997, 5(6): 60-69.
[10]田永利, 邹慧君, 郭为忠, 等. 基于Matlab-Sim Mechanics的机电产品组成建模与仿真技术研究[J]. 机械设计与研究, 2002, 19(12): 10-12.
TIAN Yongli, ZOU Huijun, GUO Weizhong, et al. Study on modeling and simulation methods for constitution objects of mechatronic products based on Matlab-Sim Mechanics[J]. Machine Design and Research, 2002, 19(12): 10-12.
[11]陆佑方, 冯冠民, 齐朝晖. 柔性机械臂动力学与控制建模的若干基本问题[J]. 机器人, 1993, 15(2): 52-59.
LU Youfang, FENG Guanmin, QI Zhaohui. Application of artificial neural networks in dynamic identification and position control of robot manipulators[J]. Robot, 1993, 15(2): 52-59.
[12]吴宏鑫, 沈少萍. PID控制应用与理论依据[J]. 控制工程, 2003, 37(1): 6-10.
WU Hongxin, SHEN Shaoping. Basis of theory and applications on PID control[J]. Control Engineering of China, 2003, 37(1): 6-10.
[13]陆磊. 模糊控制在轮式机器人上的应用[J]. 微型电脑应用, 2010, 26(12): 31-33.
LU Lei. Application of fuzzy-PID controller in moble robot[J]. Microcomputer Applications, 2010, 26(12): 31-33.
[14]阎绍泽, 刘又午, 张铁民. 柔性机械臂动力特性的实验研究[J]. 河北工业大学学报, 1996, 25(11): 12-16.
YAN Shaoze, LIU Youwu, ZHANG Tiemin. Experimental study on dynamic performances of flexible manipulators[J]. Journal of Hebei University of Technology, 1996, 25(11): 12-16.
[15]孙奎, 谢宗武, 刘宏. 一种新的机器人动力学仿真分析方法[J]. 机械设计与制造, 2008, 5(9): 163-165.
SUN Kui, XIE Zongwu, LIU Hong. The dynamics simulation analysis of a four DOF manipulator [J]. Machinery Design & Manufacture, 2008, 5(9): 163-165.
[16]The Mathworks Inc. SimMechanics user's guide[M]. Natick, USA: The Mathworks Inc., 2002: 22-27.
[17]苗敬利. 模糊控制和传统PID控制的仿真研究[J]. 微软计算机信息, 2003, 4(7): 18-24.
MIAO Jingli. The simulation study between fuzzy control and PID control[J]. Microcomputer Information, 2003, 4(7): 18-24.
赵新华,女,1980年生,讲师,主要研究方向为超空泡航行体、AUV的动力学及智能控制方法。发表学术论文10余篇。

王璞,男,1994年生,主要研究方向为机器人智能控制。
