大流量高精度热气源系统的设计与实现
2015-12-31刘小安褚昌军张艳清
刘小安,褚昌军,张艳清
(北京特种机械研究所,北京 100143)
0 引言
当飞机穿越含有过冷水滴的云层时,飞机部件的迎风表面会结冰,改变了飞机迎风面的气动外形,从而改变了飞机的气动特性和飞行性能,尤其是稳定性和操纵性的突然恶化会直接导致飞行事故,因此飞行器的防(除)冰对飞行安全显得尤为重要。世界各国特别是发达国家的飞行器适航条例中对结冰适航都有严格规定,为验证防(除)冰系统的有效性,必须进行模拟结冰试验和自然结冰条件下的结冰风洞试验。而结冰风洞试验需要一种大流量、高精度热气源发生装置,用于向进行结冰风洞试验的飞行器模型提供压力、流量、温度连续可调的热气源,以满足不同型号飞行器模型在不同情况下的试验需求。针对此,本文提出了大流量、高精度热气源系统,解决了大流量下高精度控制问题和气体流量、压力、温度联合控制问题,可以为结冰试验飞行器模型提供所需要的气体,以确保在结冰试验时,飞行器模型上的防(除)冰系统正常运行。
1 热气源系统组成
热气源系统组成框图如图1所示。系统工作原理如下:气源经入口进入低温控制回路,实现气体压力和流量的连续调节,然后经过止回阀进入空气加热器进行加热,实现温度的连续调节,最后,从高温控制回路输出压力、流量、温度连续可调的大流量、高精度热气源。
1.1 低温控制回路
低温控制回路安装于系统最前端,连接气源入口,用于实现气体压力和流量的连续调节,其控制原理如图2所示。低温控制回路包括5条2英寸大流量支路、1条3/8英寸小流量支路、入口分流排和出口汇流排。5条2英寸大流量支路用于实现大流量控制,1条3/8英寸小流量支路用于实现对大流量时的流量精度细调,从而实现热气源的大流量、高精度控制。每条2英寸大流量支路的结构相同,按照气体流向依次安装有过滤器、流量传感器、遥控减压阀、比例流量控制阀以及两通电磁阀。过滤器用于实现对入口气源的杂质过滤,以保护后续元器件;流量传感器用于实现气体流量的实时测量,其安装于减压阀前端,可有效防止紊流对测量精度造成的影响;遥控减压阀用于实现气体压力的连续调节,由于支路流量较大,因此采用气控式遥控减压阀,其动作受电子比例减压阀的控制;比例流量控制阀用于实现流量的连续调节,由于比例流量阀不能实现对气路的完全关断,因此设置了两通电磁阀,用于控制所在支路的开通和关断。3/8英寸小流量支路与2英寸大流量支路的结构基本相同,区别在于3/8英寸小流量支路直接使用电子比例减压阀实现对压力的连续调节。
1.2 空气加热器及其温度控制柜
空气加热器用于实现气体温度的连续调节,其使用集束式加热棒进行加热,并采用上、下两个加热腔体的结构,在保证足够加热功率的同时,增加了气体加热室的行程,从而实现了气体温度的大范围、高精度连续可调,其结构如图3所示。

图1 热气源系统组成框图
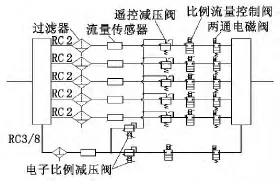
图2 低温控制回路原理框图
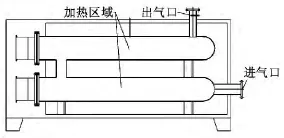
图3 空气加热器结构
温度控制柜用于实现对空气加热器的加热控制,其内部采用可控硅作为功率控制单元,可实现温度的连续可调。由于加热器总功率达700kW,因此温度控制柜内部采用分组模式,每50kW为一组,共分14组。加热时,根据目标流量值选择需要启用的组数,以实现温度控制性能的最优化。
1.3 高温控制回路
高温控制回路安装有压力传感器、温度传感器、手动截止阀、2个电控截止阀和安全阀,并设置了放气旁路,其控制原理见图4。其中,放气旁路用于热气源的预调节,待达到设定的压力、流量和温度后,再切换到输出通道,供模型使用。输出通道用于向飞行器模型供气,放气旁路用于预调节过程,使用放气旁路进行预调节时,电控截止阀1关闭、阀2打开,待出口压力、流量和温度达到设定值时,打开电控截止阀1、关闭阀2,从而实现放气旁路到输出通道的切换。飞行器模型防(除)冰试验完成后,打开电控截止阀2、关闭电控截止阀1,从而实现了输出通道到放气旁路的切换。安全阀用于实现对系统的安全保护,当出口压力达到安全压力时,安全阀将动作,从而通过放气旁路进行泄压,防止发生危险。
2 热气源系统控制原理
2.1 流量控制和压力控制
流量控制原理框图见图5。控制器通过模拟量输入模块实时采集流量传感器的流量值,并与设定的流量值比较,比较结果经运算后通过模拟量输出模块实现对比例流量阀的开启度控制,进而实现对气体流量的连续控制。压力控制原理与流量控制基本相同,区别在于采集的是压力传感器的压力值,经比较后控制比例减压阀的开启度。由于气体压力经加热后会发生变化,故本系统压力传感器安装于空气加热器出口处,以实现对出口压力的精确控制。

图4 高温控制回路原理图
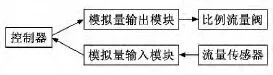
图5 流量控制原理框图
2.2 温度控制
安装于气源控制箱内的PLC通过MODBUS总线实现对温度控制柜的远程控制。温度控制柜实时采集空气加热器出口温度传感器的温度值,并与控制器设定的温度值相比较,比较结果经运算后输出PWM波控制可控硅导通角,进而实现对空气加热器的加热控制,从而实现对温度的闭环连续控制。本系统中,温度控制柜作为MODBUS从站,PLC为主站。具体温度控制由安装于温度控制柜内的温控仪表实现,PLC通过MODBUS总线实现对温控仪的远程控制,包括启动加热、停止加热、参数设置和实时温度读取等操作。
2.3 多变量联合控制
本系统是一个典型的多变量耦合系统。首先,气体流量和压力存在耦合关系,一方的变化将对另一方产生影响;其次,在加热过程中,随着温度升高,出口压力也会慢慢增大,从而造成3个变量相互耦合的情况,增加了系统控制的复杂程度。本文根据调试经验,总结了一套通过控制流程解耦的方法,可以有效实现从3变量到2变量的转换,降低控制系统维数,并达到理想的控制效果。
根据调试经验可知,温度的变化只对出口压力造成影响,而温度只与系统流量有关,因此可将整个调节过程分为3步:①先将流量和压力调节到设定值;②将流量和压力切换为手动控制,启动温度自动控制;③待温度达到目标值后,再进行流量和压力的细调节。
由于气体流量和压力耦合度很高,相互影响很明显,为了实现系统大流量范围的精确调节,需在调节过程中改变系统负载,即调节出口压力,常见做法是在出口处安装比例减压阀。流量和压力2变量调节可按如下步骤进行:①将减压阀初始开启度手动调节到一个经验值(本系统为40%),出口比例流量阀全开;②将流量自动调节到目标流量;③流量稳定后,将其切换到手动模式,慢慢调节出口比例减压阀,并同步观察出口压力变化情况,直至其稳定在目标值的90%左右;④将流量切换到自动调节模式;⑤再将压力切换到自动模式。从以上步骤可以看出,2变量系统的调节思路是先依次进行1变量调节,使流量值和压力值接近目标值,再启动2变量进行细调节。变量耦合度越高,细调节范围越窄,细调节过程中需关注各变量状态,防止因配气系统、负载等外部干扰的影响而造成系统震荡。
3 热气源系统软件设计
本系统主控单元为西门子S7-300系列PLC,软件采用结构化编程语言SCL编码实现。软件设计过程充分采用模块化设计理念。其系统总体流程如图6所示。
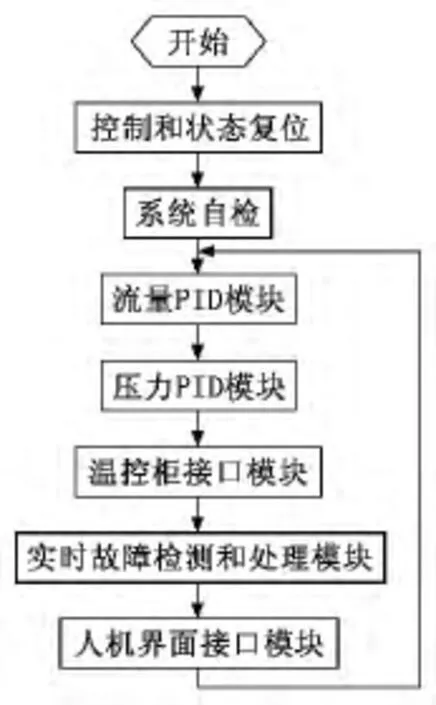
图6 系统总体流程图
4 热气源系统调试结果
4.1 最大流量下精度调试
进行流量单变量调节时,设定目标流量为75Nm3/min(1.5kg/s),其系统阶跃响应如图7、图8所示。从图7、图8可以看出,系统响应时间约为3min,稳态误差为0.019Nm3/min(0.38g/s),达到了预期效果。配气系统(为本系统供气)响应时间为30s,本系统响应时间满足其抗冲击的要求。
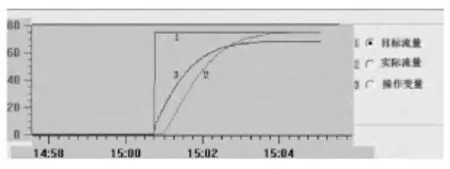
图7 流量0Nm3/min~75Nm3/min(0kg/s~1.5kg/s)阶跃响应

图8 流量75Nm3/min~0Nm3/min(1.5kg/s~0kg/s)阶跃响应
4.2 多变量调试
进行流量、压力、温度3变量调试,其结果如图9所示。

图9 多变量调试结果
从图9可以看出,进行多变量调试时,稳态压力控制精度为0.004MPa,稳态流量控制精度为0.00g/s,稳态温度控制精度为-4℃,达到了预期效果。
4.3 系统技术指标
本系统可达到的主要技术指标如下:
气体流量(kg/s): 0~1.6;
流量控制精度(g/s):1.6;
气体压力(MPa):0~0.3(相对);
压力控制精度(MPa): ±0.005;
气体温度(℃): 常温~400;
温度控制精度(℃): ±5。
5 结论
本文提出的大流量、高精度热气源系统,通过多支路结构设计和控制参数优化,解决了大流量下高精度控制问题;通过控制算法参数优化,解决了大流量下流量突变对配气系统的冲击问题;通过对系统控制流程的分解,实现了3变量到2变量的转换,解决了气体流量、压力、温度联合控制问题。调试结果表明:系统各项指标达到了预期效果,可以满足不同型号飞行器模型在不同情况下的试验需求。
[1]刘政崇,彭强,肖斌,等.3m×2m结冰风洞设计总体初步方案[G]//大型飞机关键技术高层论坛暨中国航空学会2007年学术年会论文集.深圳:中国航空学会,2007:43-50.
[2]张雪苹.飞机结冰适航审定与冰风洞试验方法[D].南京:南京航空航天大学,2010:6-11.
[3]肖春华,桂业伟,杜雁霞,等.电热除冰传热特性的结冰风洞实验研究[J].实验流体力学,2010(4):21-24.
[4]肖春华,桂业伟,杜雁霞,等.电加热过程的冰脊形成实验研究[J].实验流体力学,2010(6):52-56.