基于模糊PID 的助老助行机器人控制系统设计❋
2015-12-31魏晓娟王耀武
魏晓娟,王耀武
(1.西北民族大学 电气工程学院,甘肃 兰州 730124;2.兰州供电公司,甘肃 兰州 730000)
0 引言
随着老龄化社会的到来,老年人的养老护理已经成为一个棘手的社会问题。而助老助行机器人可以有效解决老年人由于体能下降、运动器官功能萎缩等诸多原因导致的行走不便的问题,因此成为近年来备受关注的研究热点之一。
近几年,在助行机器人领域,国内外学者投入了大量的时间研究,取得了一定的成果。但对于助行机器人控制方法的研究,大多采用传统的PID控制方法,虽然PID控制方法在控制助行机器人行走方面具有一定的稳定性和控制精度,但不能适应变化的路况,从而不能达到理想的控制效果。因此,本文提出了基于模糊PID的助老助行机器人运动控制方法,既提高了PID控制的适应能力,又保留了PID控制的优良特性,并满足了相应助行机器人行走的要求。
1 助老助行机器人控制系统总体结构
本助老助行机器人控制系统分为控制、执行和检测3个部分。控制系统采用速度环和电流环的双闭环控制,其结构框图如图1所示。控制部分主要包括电机的控制、运动算法;执行部分主要由车体平台、2个无刷直流轮毂电动机和2个万向轮组成;检测部分采用触滑觉检测系统来感知使用者施加于助行机器人上的运动意图[1],通过控制系统来实现助行机器人相应的控制策略,使机器人按照使用者的行走意图行进。另外,当使用者行走时间过长或行走不便时,也可以坐在座椅上通过操作杆控制助行机器人的人机接口部分,表达使用者的操纵意图并显示各种信息。
1.1 控制系统硬件设计
控制系统硬件由DSP微处理器、直流无刷电机驱动系统、传感器检测系统和电源系统等部分组成。其中,DSP微处理器是以TMS320F2812为核心的DSP系统,主要进行触滑觉行走意图识别和操作杆控制算法实现,并将计算结果转化成机器人左、右轮的转速,发送给电机驱动系统;电机驱动系统采用无刷直流电机,对控制系统发送的电机指令进行功率放大,驱动电机旋转;传感器检测系统包括触滑觉传感器和操作杆输出信号检测,以及电流、速度检测及故障检测电路;电源系统是电源转换部分,由24V直流蓄电池经过DC/DC转换为所需的电压(15V、9V、+5V、-5V、3.3V、2.2V)。

图1 助老助行机器人控制系统框图
助老助行机器人的无刷直流电机驱动方式采用全桥驱动两两导通方式,选用美国IR公司的IR2103,其具有驱动能力强以及强大的死区保护功能。正常工作时,DSP输出6路控制信号,经3个IR2103调制后输出6路驱动控制信号调制MOSFET导通和关断。整个驱动控制电路调制采用上管调制下管恒通的方式。
1.2 控制系统软件设计
控制系统核心为TMS320F2812DSP,其采用C语言编程,使用的编程调试软件为CCS3.3。控制系统软件总体结构框图如图2所示。
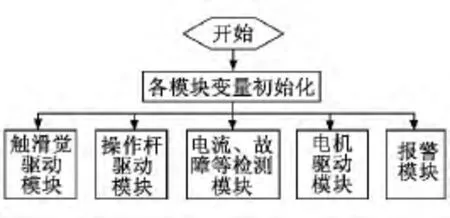
图2 控制系统软件总体结构框图
2 基于模糊PID的双电机差速驱动控制方法研究
助老助行机器人控制的目标是使机器人能够按照使用者的行走意图平稳行走。助行机器人在行走时采用的是差速控制方式,即2个驱动后轮由各自独立的2个直流无刷电机驱动,所以,助行机器人控制的精确性决定于对2个无刷直流电机协调控制的精确性。考虑到无刷直流电机是一个多变量的、强耦合的、非线性系统,如果工况发生改变,整个系统的参数也会发生改变,很难用精确的数学模型来描述。在此采用模糊PID算法来实现对每个无刷直流电机转速控制系统进行优化设计,将模糊控制和PID控制两者结合起来,克服了传统PID控制的缺点,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高和易于实现的特点[2]。
整个驱动控制部分采用经典的双闭环调速系统,内环电流环采用基本的PI控制算法设计,外环速度环采用模糊PID算法设计。控制器用实际反馈的电机速度与控制指令计算出的给定速度值相比较,通过模糊自适应转速调节器的调节,输出电流给定值,与检测到的电流实际值相比较,经过电流PI调节器,输出得到供给电机的控制电压。主要是通过改变控制电压来实现对电机的速度调节,控制电枢电流达到控制电机转矩的目的。
在模糊PID控制算法设计过程中,通过计算当前系统速度的偏差e和偏差变化率ec,定义输入输出变量的模糊集,确定各变量论域,建立模糊变量赋值表。在Δt时间内,将DSP根据控制指令(速度和方向)计算控制量作为模糊控制器的给定目标r,检测到的实际电机转速作为反馈输入b,计算得到转速偏差和偏差变化率,经量化和模糊化后作为模糊控制器的输入信号,模糊判决后输出模糊控制量U,解模糊后作为电机转速的增量u,与前周期转速相加后输出。本文选择输入量与输出量的模糊集合均为7个,即NB、NM、NS、Z、PS、PM、PB,分别代表负大、负中,负小、零、正小、正中、正大。根据模糊集合的个数以及模糊控制的输入量与输出量的实际论域,可以确定输入量和输出量模糊集合的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};然后根据长期控制实践和学习积累的经验归纳出若干条控制规则,根据控制规则进行模糊推理计算得到一张控制查询表。实时控制时,采用查询模糊矩阵表法进行PID参数的在线自整定。
3 试验验证及结果分析
将助行机器人的运动分为前进、后退、左转、右转、停止5种基本状态及它们的组合。因此,对助行机器人的前进、后退、左转、右转等基本行走模式的速度跟随特性和调速响应时间进行了试验,同时在试验中对加速、减速特性进行了研究分析,试验结果如图3所示。从试验数据可以看出,两电机转速对于设定的行走速度具有很好的跟随特性,同时有很好的时间响应特性,在0.5s内基本上实现了转速的跟随。在机器人左、右转试验中,将两轮速度差设定为70r/min,在0.7s内基本实现了转弯。
对于行进中的加速、减速,在45r/min~200r/min范围内,调节占空比减速或加速,响应时间非常快,在0.5s内实现了稳态的跟随。以上试验结果表明运动模块具有良好的转速跟随特性及较短的调节响应时间。

图3 各个行走模式下的响应特性曲线
4 结论
试验结果证明,控制系统的软、硬件可以满足控制性能的要求,并能够保证助老助行机器人在助行过程中的舒适性与安全性,能够快速高效地实施辅助行为,提出的模糊自适应算法具有较好的自适应性,从而验证了助行机器人的有效性并且能够实现高精度运行。
[1]Zhang X D,Wei X J,Zhang J J.Detecting system design of tactile sensor for the elderly-assistant &walking-assistant robot[J].Key Engineering Materials,2011,455:37-41.
[2]Gao M Q,He S H.Self-adapting fuzzy-PID control of variable universe in the non-linear system[C]//International Conferenceon Intelligent Computation Technology and Automation.[s.l.]:[s.n.],2008:473-478.