机载惯导系统减振设计
2015-12-31宁月光贾新强
宁月光,贾新强
(海军装备部驻西安地区军事代表局,西安 710043)
0 引言
惯性导航系统是载机主要导航信息源,为载机提供位置、速度以及航向、姿态等信息,并与自动驾驶仪、雷达以及火控系统交联,其性能及可靠性直接影响载机的飞行安全及飞行任务的完成。
机载惯导系统的使用环境恶劣,要承受多种形式的冲击和振动,如飞机起飞降落、发射导弹等带来的冲击,发动机运转、炮击、气动扰流带来的振动等,这些环境不仅会影响惯性元件的精度,而且会降低惯性元件和相关电子器件的寿命。
惯导系统要保持高精度和高可靠性,其减振系统设计至关重要[1]。
1 机载惯导系统对减振的要求
机载惯导系统按照其原理的不同,可分为平台惯导系统和捷联惯导系统[2],平台式惯导系统已经广泛应用在各种机型中,随着激光陀螺技术和计算机技术的飞速发展,捷联惯导系统技术也日趋成熟,由于其具有的高可靠性和良好经济性,开始逐步取代平台式惯导系统,成为机载惯导系统主流产品[1]。
对于惯导系统而言,其减振系统的设计一般需满足:
(1)减振系统的固有频率应满足系统的要求;
(2)较高的衰减率;
(3)良好的高低温性能;
(4)减振系统能准确传递定位基准;
(5)无角振动或较小的角振动。
与航天和航海惯导系统相比,由于使用环境的不同,机载惯导系统对减振系统的设计有着特殊的要求:
(1)尺寸小,重量轻;
(2)三方向等刚度设计;
(3)寿命不低于7.5年;
(4)能抵抗较强的耐久振动试验。
2 机载惯导减振系统设计
2.1 机载惯导减振系统动力学模型
平台惯导系统由一个四环全姿态惯性平台和相应的电子线路组成,惯性平台环架由内向外依次为方位环、内横滚环、俯仰环以及外横滚环,方位环的台体上装有两个动力调谐陀螺和三个摆式加速度计,减振器布置在平台环架与机箱之间,隔离载体的各种振动和冲击,减少外部环境对陀螺和加速度计的影响[3][4]。
假设惯导减振系统六个自由度完全解耦,则平台惯导系统沿一个轴简化的动力学模型为五节点模型,如图 1(a)所示,其中参数(M1,K1,C1),(M2,K2,C2),(M3,K3,C3),(M4,K4,C4),(M5,K5,C5)分别代表平台惯导系统方位环、内滚环、俯仰环、外滚环以及减振系统的质量、弹性系数和阻尼系数。平台惯导系统动力学模型比较复杂,每个单元的参数难以精确确定,因而计算难度大。
实际分析计算中,常常将四个环架部分看成一个整体,通过试验测试出其总的弹性系数和阻尼系数,这样平台惯导系统动力学模型就可以简化为图1(b)的形式[3]。
捷联式惯导系统由一个台体和相应的电子线路组成,台体上装有三个单轴激光陀螺和三个摆式加速度计,减振器布置在台体与机箱之间,减少外部环境对陀螺和加速度计的影响。捷联式惯导系统动力学模型与平台式惯导系统简化后的模型一致,见图1(b)所示,其数学表达式与式(1)相同[5][6][7]。
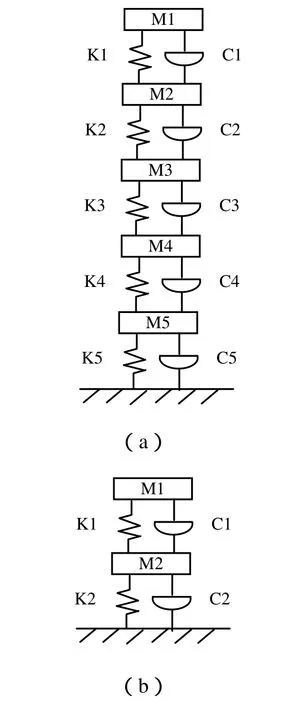
图1 平台惯导系统振动动力学模型
图1(b)所示的平台惯导系统动力学模型的数学表达式如下:

2.2 机载惯导减振系统设计
2.2.1 机载惯导减振系统技术指标
机载惯导减振系统的技术指标包含以下内容:
(1)固有频率
减振系统固有频率为额定载荷情况下减振系统的谐振频率,通常用激励为 1g的正旋振动时减振系统的响应来确定。
(2)固有频率处的放大倍数
减振系统固有频率的放大倍数为谐振频率处响应幅值与激励源幅值之比。
(3)衰减率
衰减率是减振系统的重要指标,它标志着减振系统的减振性能,常以某个固定频率处减振内外振动幅值的比来表示。以平台惯导系统为例,其衰减率定义为100 Hz处减振系统振动幅值与基座振动幅值的比。
(4)阻尼比
阻尼是自由振动衰减的各种摩擦和其它阻碍作用,主要是减振器内材料的热损耗。阻尼比是阻尼系数与临界阻尼系数之比,是反映减振系统减振性能的一项重要指标。它与固有频率处的放大倍数有一定的对应关系。
(5)固有频率的温度变化范围
机载惯导系统的工作温度变化范围较大,从-50℃到+70℃,减振系统固有频率在该温度范围内的变化应控制在一定的范围,固有频率变化较大,将影响系统的振动性能。
2.2.2 机载惯导减振系统设计
(1)机载惯导减振系统结构形式
机载惯导的减振系统是六自由度系统,为了实现惯导系统三个坐标轴的完全解耦,其布局必须符合重心安装,即减振系统的几何中心与被减振部分的质心重合,而且减振系统沿三个坐标轴对称布局。
机载惯导减振系统减振器的布局形式多种多样,常用的结构形式见图2[8]。
在图2中,假设被减振部分的质心位于图示的正方体的中心,则减振器布局形式(a)、(b)和(d)完全符合沿坐标系对称且满足质心和几何中心重合的条件,因而减振系统六个自由度的振动互不耦合,相对独立,是理想的结构形式。
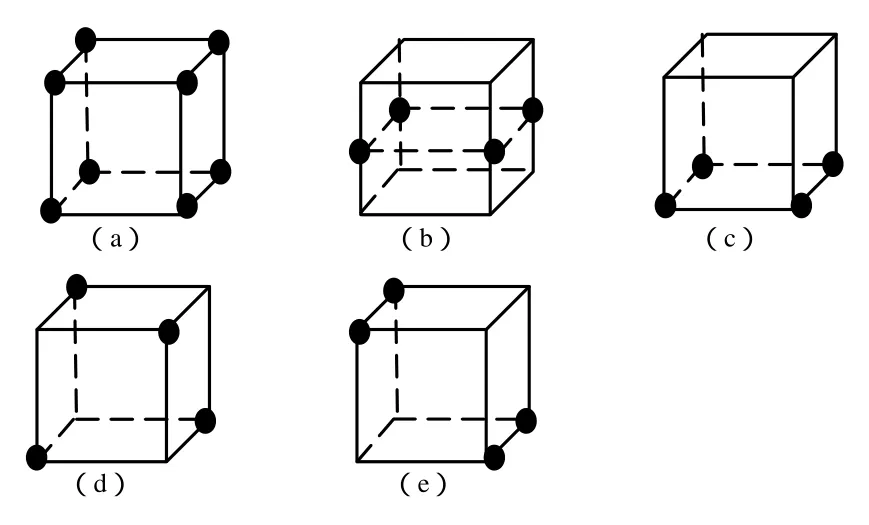
图2 减振器布局形式
对于平台式惯导系统,由于平衡环架本身为对称结构,上面的假设容易满足,但对于捷联惯导系统,被减振部分的质心往往无法满足上面的假设,除了需要进行质心配平外,还需要对减振系统的布局进行调整,减振系统中每个减振器的频率也应根据具体结构形式进行合理匹配。航空机载环境要求惯导系统沿惯导坐标系三个轴承受振动的能力相同,为了保证这个条件,除了减振系统具有对称结构外,减振器的结构设计和选型也要满足沿三轴刚度相同,即三向等刚度设计。
(2)减振器材料选择
减振器的材料主要采用橡胶和金属两种,有时也可将两者结合起来构成金属橡胶减振器。
橡胶是一种高分子物质,有良好的消音、隔振及缓冲能力,其主要性能参数由橡胶的硬度及弹性模数、许用强度及最大允许变形、形状系数及动态系数和阻尼比决定。
橡胶减振器的特点是尺寸小,结构简单,能自由地选取 3个方向的刚度,不需要很复杂的结构就能得到优良的隔振和降噪效果,同时还具有适当的内摩擦阻尼,使其能够在比较短的时间周期内、在电器设备的共振频率下发挥隔振作用,特别是能吸收高频振动与冲击振动能量,因而对降低和吸收高频结构噪声及冲击激励能产生显著效果。
目前几乎所有机载惯导减振系统的减振器均选用橡胶减振器。各种常用减振橡胶性能对比见表1。
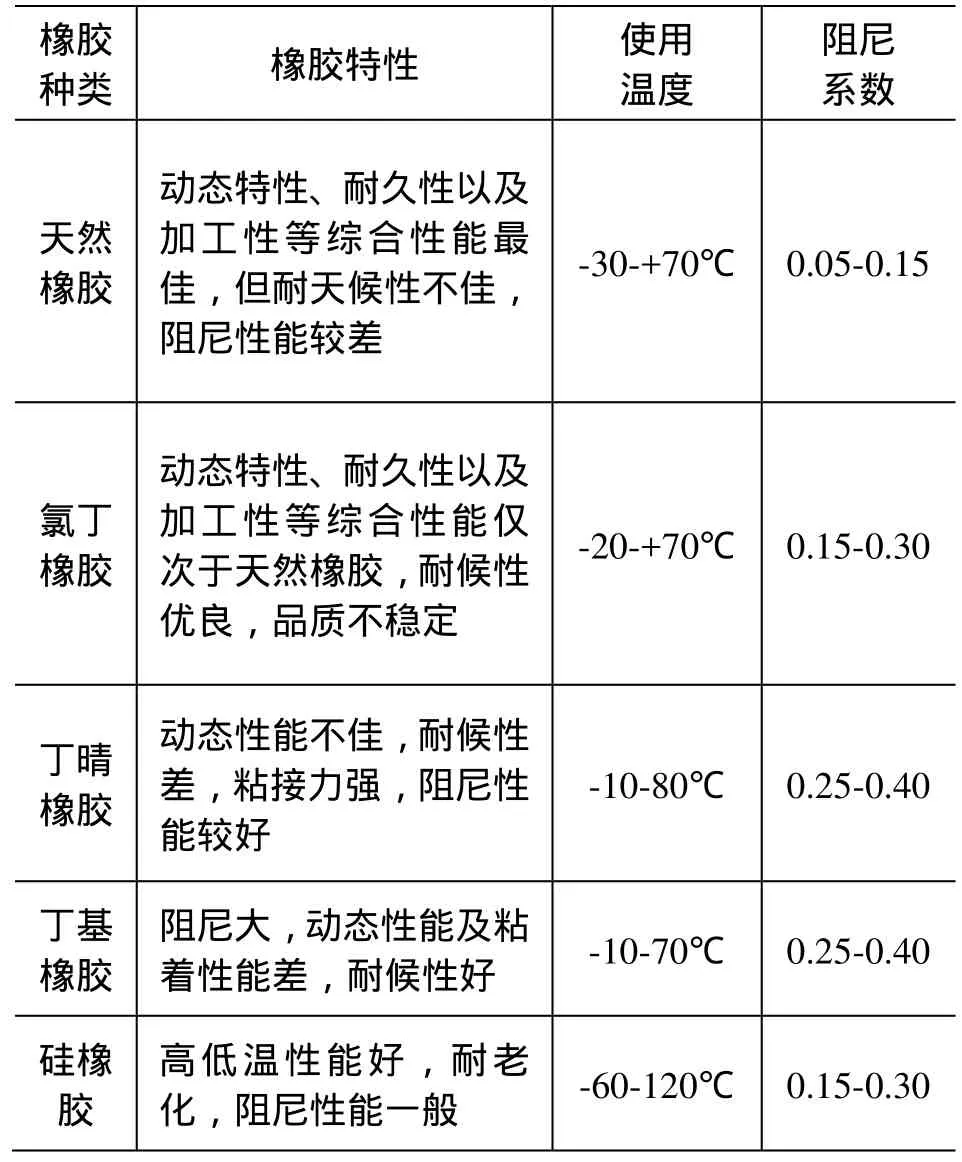
表1 各种常用减振橡胶性能对比
航空机载惯导减振系统一般要求固有频率处的放大倍数不超过4,所以阻尼比一般选在0.15至0.25之间。
硅橡胶与其它橡胶材料相比,高低温性能好且耐老化,阻尼性能可通过优化配方加以提高,比较符合机载惯导系统对温度环境和寿命的要求,是机载惯导系统减振器的首选材料。
但橡胶减振器的刚度随频率、温度、振幅和硬度而变化,对环境要求较高,使用寿命有限。国内已有研究机构在进行金属减振器应用的研究,主要使金属减振器小型化,并取得了较好的进展。
(3)减振系统固有频率设计
根据系统振动的动力学方程和陀螺和加速度计的敏感频率,结合惯导系统物理模型仿真试验,综合考虑确定减振器的固有频率。对于平台式惯导系统还必须考虑稳定回路各环的固有频率,原则上,减振系统固有频率应远离惯性元件敏感频率,一般小于敏感频率最小值的二分之一。
(4)减振系统阻尼特性设计
减振系统的阻尼特性的选取与减振系统固有频率放大倍数直接相关,其关系为:

式中,K为减振系统阻尼比;Qmax为减振系统固有频率处的放大倍数
2.3 减振系统的实验研究
减振系统装配前要进行减振器配对筛选以及安装位置调试和测量,减振系统装配完成后,通常要进行固有频率测试以及角振动试验,以检验减振结构是否满足系统的要求。
2.3.1 减振器配对试验
主要是在专用刚度测试仪上测试每个减振器沿安装轴方向上的刚度,然后按照刚度的大小进行分类,将刚度差在要求范围内的减振器分为一组,进行装配。
也可以在振动测试台上对每个减振器进行频率测试,然后在按照频率进行分类配对。
2.3.2 减振系统固有频率测试
用模拟配重代替减振系统的真实负载,通过振动测试台的正旋扫描,测试减振系统沿三个轴的固有频率、固有频率处的放大倍数以及100 Hz处的衰减率。
2.3.3 减振系统交叉耦合试验
用模拟配重代替减振系统的真实负载,通过振动测试台的正旋扫描,测试减振系统垂直振动时水平两个方向的响应,该响应反映减振系统交叉耦合的大小,应控制在较小的范围内。该响应一般控制在垂直振动量级的10-15%。
2.3.4 减振系统耐久试验
机载惯导系统经过耐久试验后减振器应功能正常,本身无损伤。
橡胶减振器经过耐久试验后,经常会出现橡胶体与金属嵌件之间开裂、橡胶体内部撕裂等现象,如何解决和克服上述现象,是橡胶减振器研制的一大难题。比较可行的方法是对金属表面进行有效处理、尽可能增加金属嵌件与橡胶的结合面积以及改善橡胶配方提高橡胶的撕裂强度。
3 机载惯导减振系统设计实例
根据某型机载平台惯导系统总体设计要求,其减振系统采用了以下方案:
减振系统结构形式:采用图2所示的结构形式,减振系统由两组八个减振器组成,每组四个减振器,对称布置在正方形的对角线上,以最大限度地减小减振系统的尺寸,如图3所示。减振器采用JPS型结构。
固有频率:安装在平台惯导系统台体上的挠性陀螺得一倍频频率为240Hz,加速度计的敏感频率为 1000Hz,稳定回路各环的频率在 70~110Hz之间。根据平台惯导系统动力学数学模型计算分析,减振器的频率最佳范围应为30~45之间。
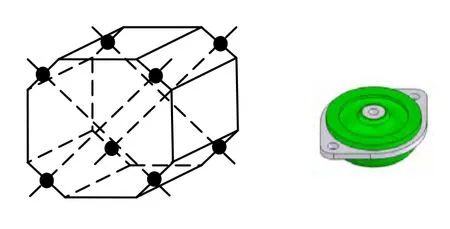
图3 减振系统及减振器结构形式
经过实际物理模型的实验验证,最终确定减振器的频率为38±3Hz。固有频率放大倍数:小于4;高低温频率变化范围:小于15Hz;100Hz衰减率:大于80%,减振系统实际测试曲线见图4。
该减振系统固有频率39.5Hz,放大倍数 2.5,100Hz处衰减率 85%,高低温固有频率变化范围14Hz,完全满足系统的设计要求。
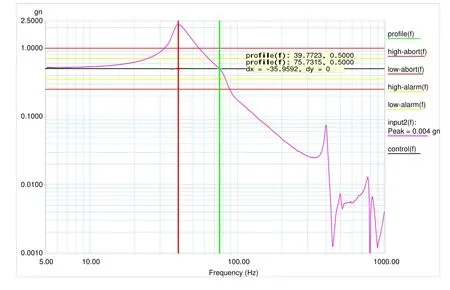
图4 减振系统测试曲线
4 结论
本文根据机载惯导系统的使用环境,提出了系统对减振系统的要求,并针对平台式惯导系统和捷联惯导系统,建立了相应的系统振动动力学模型。在总结减振系统设计指标的基础上,提出了机载惯导减振系统的设计方法,并给出了一个平台惯导减振系统设计实例,该减振系统满足系统需要。
[1]秦永元.惯性导航[M].北京:科学出版社,2006:133-134,287-288.
[2]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007:103-104.
[3]程峰,任戈.惯性稳定平台建模及振动传递分析[J].光电工程,2006,33(4):19-22.
[4]黄金威,杨鹏军,于云峰,王佳民.惯性平台橡胶减振器弹性特性的有限元分析[J].机械设计,2006,23(11):51-54.
[5]庹洲慧,胡德文,李明华,魏建全.捷联惯导系统减振设计[J].中国惯性技术学报,2009,17(6):648-650.
[6]王海峰,吴斌,张敏,李春朴.激光捷联惯导减振系统设计与应用[J].航天控制,2007,25(6):81-85.
[7]杨福峰,芮筱亭,马蕾.激光陀螺捷联惯导减振系统动力学建模与仿真[J].中国惯性技术学报,2008,16(3):301-305.
[8]姚建军.捷联惯导系统不同隔振方式的比较[J].强度与环境,2009,36(2):19-27.
