雷达目标航迹建立和管理的设计与实现
2015-12-31郑贵文
郑贵文
(海军装备部装备采购中心)
0 引言
随着信息技术的发展,雷达系统对目标信息处理的要求越来越高,仅仅采用普通信号处理技术进行处理已经无法满足日益增长的应用需求。雷达数据处理技术应运而生,其在雷达系统中发挥着越来越重要的作用。雷达数据处理的基本任务,是将雷达探测到的信息处理成用户可以直接应用的情报信息[1]。其中,雷达目标航迹建立和管理是雷达数据处理技术的重要步骤之一。其重要意义在于,仅仅将原始雷达视频回波经过点迹凝聚处理,产生的单一点迹信息已经不能满足雷达系统和用户对雷达目标信息的要求,有必要在点迹凝聚和处理后对目标的运动轨迹等相关信息进行更深层次的研究,而这正是雷达目标航迹建立和管理所研究的核心内容。
所谓航迹,是指对目标的若干点迹进行处理后连成的曲线。航迹建立和处理是将同一目标的点迹连成航迹的处理过程[1]。通过航迹建立和管理,与仅提供点迹信息相比,用户可以更直观地获取目标的运动轨迹、速度等运动状态信息[2]。
本文将结合航迹建立和管理在实际雷达系统中的实现,对航迹建立和管理的相关算法进行研究和讨论,给出一种工程实际中使用的航迹建立和管理的算法。
1 航迹建立和管理
对于雷达系统而言,一般会在雷达信号处理后得到目标回波的原始视频数据,随后对原始视频数据进行目标的点迹凝聚和处理。然而,对于现代雷达系统而言,仅仅获取雷达目标的点迹信息是远远不够的,用户还需要得到目标的运动轨迹、运动速度等有关航迹信息。通过对雷达回波数据进行互联、跟踪、滤波、平滑、预测等处理,能够有效地消除雷达系统的随机误差,精确估计目标的位置和相关的运动参数,预测到目标下一时刻的位置,并形成稳定的目标航迹,从而为用户提供更为详实的雷达目标相关信息,这些都是航迹建立和管理无可替代的功能[3-5]。
航迹是由来自同一个目标的量测集合所估计的目标状态形成的轨迹[2],其可靠性可以通过航迹质量来描述。根据航迹质量的不同,在本文中将航迹按照质量由高到低的顺序依次分为可靠航迹、分支航迹以及暂时航迹。可靠航迹指的是经过多次雷达扫描周期的相关录取和处理后,依然能够有稳定输出的航迹。分支航迹和可靠航迹是相对应的关系,如果可靠航迹在某一雷达扫描周期内未能录取到点迹,而需要通过扩大跟踪波门来录取到点迹,那么该点迹将作为新建的分支航迹的录取点。暂时航迹是指航迹质量不够高,需要继续录取点迹的非确认航迹。单个点迹,若其初始波门与新的点迹相关上,则转化为暂时航迹。
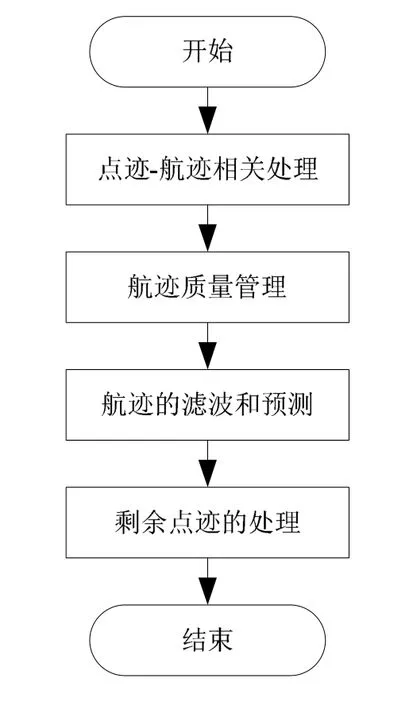
图1 雷达目标航迹建立和管理流程图
航迹的建立和管理,按照处理的顺序依次包含了航迹起始、点迹-航迹相关、航迹的确认和形成、航迹的滤波和预测、航迹的终止等流程。在整个过程中,通过不断地对航迹的质量进行改变和管理,实现航迹由单个点迹向暂时航迹再到可靠航迹的转换,最终到航迹消亡的全过程。在实际的工程实现中,由于可靠航迹与暂时航迹的优先级高,因此,将首先进行航迹的点迹-航迹相关处理工作;然后是航迹质量管理,其中包括了航迹质量的更新、航迹的确认和删除;接着是航迹的滤波和预测,根据航迹质量的不同,采取不同的算法平滑目标航迹信息并对下一时刻的状态信息进行预测;最后是剩余点迹的处理,包括了剩余点迹的相关和新航迹的起始。整个雷达目标航迹建立和管理的流程如图1所示。
1.1 点迹-航迹相关处理
点迹-航迹相关处理是将雷达点迹与已知的航迹进行比较,确定配对的过程。在完成配对后,雷达目标的航迹信息将会被更新。在这里,航迹包含了可靠航迹、暂时航迹以及分支航迹。具体的实现过程通过跟踪波门判断雷达点迹和已知航迹之间的关系来实现。整个过程可以分为“粗相关”和“精相关”两个步骤[3]。“粗相关”指的是根据已知航迹上一雷达扫描周期的预测值为中心建立相关波门,波门的大小主要根据目标的距离、方位、速度等信息而定,如果本雷达扫描周期点迹的观测值落入波门内,则说明点迹与航迹相关;“精相关”建立在“粗相关”的基础上,指的是在“粗相关”的处理过程中,如果存在多个点迹与同一个已知航迹相关,则需要确定唯一的点迹作为该已知航迹的相关点。在本文中,选取雷达点迹中到已知航迹直线距离最短的那个点迹作为该已知航迹的相关点。整个点迹-航迹相关处理的流程如图2所示。
1.2 航迹质量管理
航迹质量管理的主要目的是为了维护真航迹不被删除的同时,及时、准确地进行不同类型航迹之间的转换并删除已建立的假航迹。本文中主要通过计分法对航迹质量进行打分来完成这一任务。所谓的计分法,主要是以雷达点迹与不同大小的波门相关与否来给出对应的航迹质量分数,并在整个过程中对航迹质量分数进行更新。同时,由于存在航迹之间的转换以及航迹的建立与删除,因此,还需要根据航迹质量分数的变化,实时对航迹质量进行管理。航迹质量管理主要包括了分支航迹的质量更新,可靠航迹以及暂时航迹质量更新及确认与删除。本文中,将选取如下的方法对航迹进行计分:对于所有的航迹,如果存在雷达点迹与小波门相关,则该航迹质量加3分。否则,如果存在雷达点迹与中波门相关,则该航迹质量加2分。若没有点迹与中波门相关,则该航迹质量减1分。航迹质量分数最多为12分,以后便不再增加。通过管理航迹质量分数的变化,可以动态地实现航迹的转换、确认与删除。
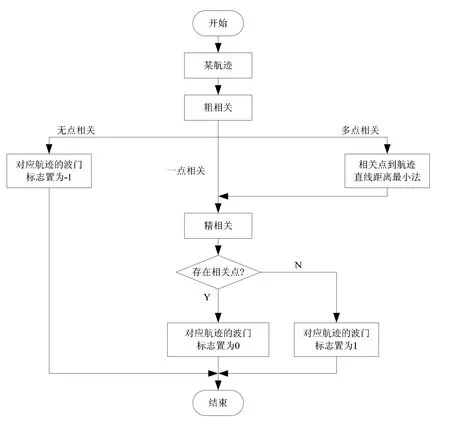
图2 点迹-航迹相关处理流程图
1.3 航迹的滤波和预测
航迹的滤波和预测主要完成两个功能:一个是对当前的测量值进行滤波平滑,另一个是对下一个雷达扫描周期的航迹状态进行预测。考虑到工程实现的实时性,本文采用最小二乘法,其是在得不到准确的量测及动态系统误差统计特性情况下的一种数据处理方法。首先,对所有航迹的测量值进行更新,然后,根据航迹的类型和目标的机动特性,选取不同的滤波点数计算航迹的滤波值和预测值。对于可靠性高的可靠航迹,采用较多点数的滤波算法,而对于可靠性差的暂时航迹和分支航迹,采用较少点数的滤波算法。同样的,对于不同机动属性的目标采用类似的方法,机动性强的目标采用较少点数的滤波算法,机动性弱的目标采用较多点数的滤波算法。在实际的工程应用中,证明了该方法的实用性和有效性。
1.4 剩余点迹的处理
剩余点迹的处理主要有三个方面的工作:其中,前两个都是建立在用户建立全域或者区域建航的前提下,第一个是在剩余点迹中,如果存在能够被上一雷达扫描周期指定区域范围内点迹的初始波门录取的点迹,则将建立起新的暂时航迹;第二个是将本雷达扫描周期内,在该指定区域范围内的雷达点迹作为航迹起始的第一点并进行存储;第三个是将与前两点无关的雷达点迹删除,以减少算法和软件的运算量。在本文中,为了确保航迹正确和快速的起始,采用了逻辑滑窗检测法中的3/3准则来进行航迹的起始,即在连续的三个雷达扫描周期内都能相关上真实的雷达点迹,才会对该航迹进行起始。整个剩余点迹的处理流程如图3所示。
2 相关技术研究
2.1 半自动波门建航
在本雷达系统中,采用“压一点”的方式来实现半自动波门,即在显控界面上选取一点作为半自动波门的中心点。同时,整个雷达系统对建航的要求是三个雷达扫描周期建航。因此,在建立完半自动波门后,在第一个雷达扫描周期录取点迹时,选取半自动波门范围内与所压中心点直线距离最近的点迹作为航迹起始点;在第二个雷达扫描周期录取点迹时,将对雷达点迹进行排序以此来选取合适的点迹;在第三个雷达扫描周期录取点迹时,将采用滤波外推来选取第三个点迹。
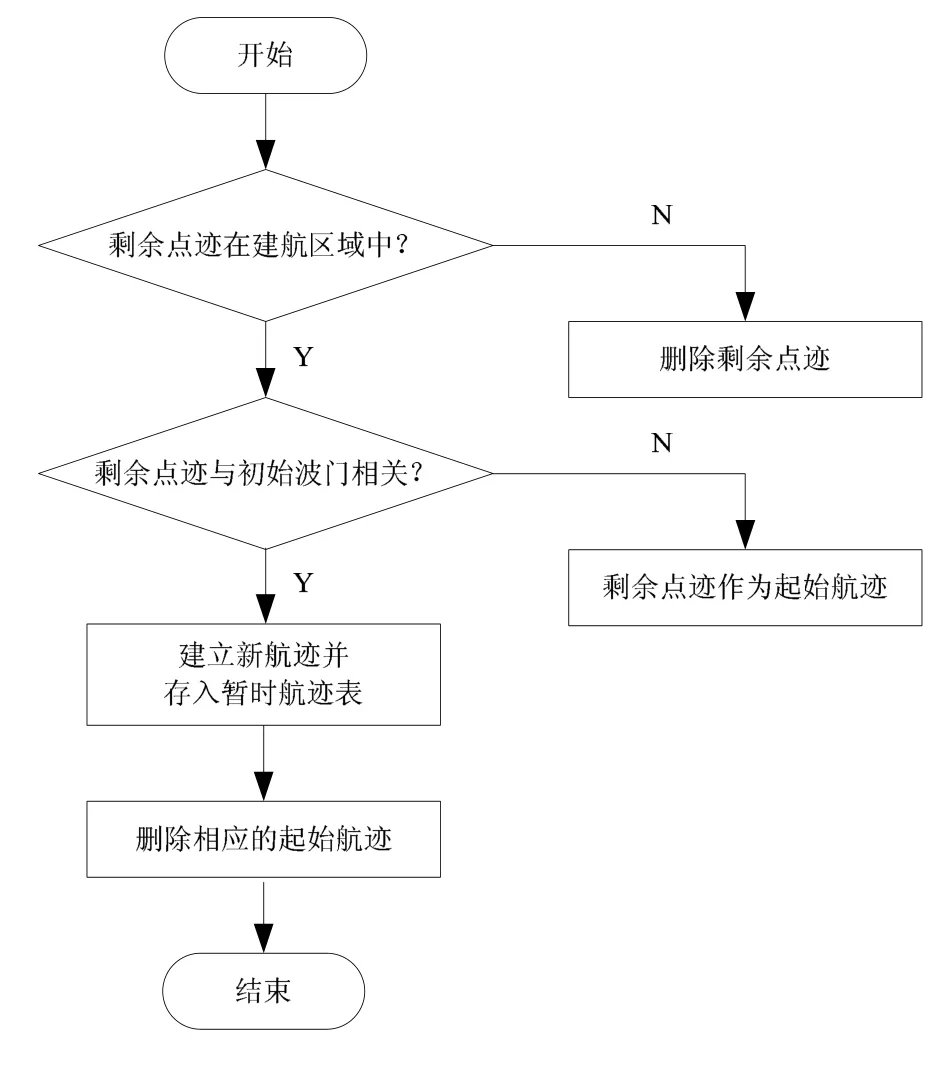
图3 剩余点迹的处理流程图
2.2 排序的原则
在本文2.1节中提到的关于半自动波门在第二个雷达扫描周期录取点迹时将对雷达点迹进行排序,由于本雷达系统,可以从点迹凝聚过程中得到有关雷达点迹的丰富相关信息,因此,本文将以点迹凝聚时,参与点迹凝聚的原始视频点的个数进行排序,从中选取与第一个雷达扫描周期的参与点迹凝聚的原始视频点个数最为接近的雷达点迹作为首选。在实际的雷达工作过程中,验证了这样排序选取雷达点迹的合理性。
2.3 航迹补点
在真实的雷达回波中,可能存在可靠航迹在某次雷达扫描中未能获取真实相关点迹的情况,这时候就需要对雷达航迹进行补点。航迹补点指的是根据该可靠航迹当前的位置,运用滤波理论进行预测,用预测点更新可靠航迹。但是,航迹补点不能无限制地持续下去,本文采用对其航迹质量分数进行减分的方式来体现这一状况,即若是在连续的若干个雷达扫描周期内都没有真实点迹和该航迹相关,那么该航迹的质量分数就会不断减少,这样做的好处在于能够充分反映雷达的真实工作状态。
3 结束语
本文给出了一种工程化雷达目标航迹建立和管理的算法,通过算法的讨论、软件实现以及经过实际工程验证,该算法能够准确实现航迹的实时建航,其各项指标能够满足雷达系统对目标稳定精确跟踪的要求。
[1]吴顺君,梅晓春等著.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[2]何友,修建娟,张晶炜,关欣等著.雷达数据处理及应用(第二版)[M].北京:电子工业出版社,2009.
[3]管桦.边扫边跟踪(TWS)雷达航迹跟踪算法的研究[D].西安:西北工业大学,2003
[4]蒋希帅.雷达目标跟踪滤波算法的研究[D].大连:大连海事大学,2008.
[5]韩晓峰.雷达数据处理及其实时性的研究与应用[D].成都:四川大学,2006.