单通道单脉冲跟踪系统自动校相的设计与实现
2015-12-30钟水和潘尧成陈玉龙
钟水和,王 建,潘尧成,陈玉龙
(中国酒泉卫星发射中心,甘肃 酒泉 732750)
单通道单脉冲跟踪系统自动校相的设计与实现
钟水和,王建,潘尧成,陈玉龙
(中国酒泉卫星发射中心,甘肃 酒泉732750)
摘要:针对传统手动校相存在操作时间长、精度差的缺点,提出了连续波测速雷达的自动校相技术;研究了单通道单脉冲跟踪原理,建立了连续波测速雷达的自动校相模型,采用程序技术实现对连续波测速雷达全自动校相;试验结果表明:采用该技术对连续波测速雷达校相后,其交叉耦合优于1/20,收敛特性好。
关键词:单通道单脉冲;连续波测速雷达;交叉耦合;自动校相
单脉冲自跟踪是一种零值自动跟踪体制,具有动态响应快、跟踪精度高的特点。利用差模电磁场的天线方向图,以轴向为零值,偏轴有极性的特点来实现自动跟踪的[1-3]。与多通道接收机相比,单通道具有设备简单、影响跟踪性能的和、差通道相位一致性易调制、易保持等特点[4],单脉冲单通道(Single Channel Monopulse,SCM)跟踪体制广泛应用于各种业务类型的自跟踪系统中。
由于天线电轴漂移、环境温度变化或天线极化跟踪等多种因素的影响引起和差通道相对相移,使得交叉耦合指标不断恶化[4]。因此,必须定期对单通道单脉冲跟踪系统的和差通道相位差进行校正。传统手动校相采用人为干预的方法,手动偏开天线,之后调整跟踪接收机的相位和差斜率参数,使交叉耦合和误差电压斜率达到系统要求。
传统手动校相存在操作时间长,精度差等缺点,文中分析了单通道单脉冲跟踪原理,建立了连续波测速雷达的自动校相模型,采用程序技术实现了对测速雷达自动校相,进一步提高了单脉冲单通道自跟踪系统的跟踪精度。
1单通道单脉冲跟踪原理
本文所述的是以馈源网络中TE11模为和通道信号,以TE21模为差通道信号来实现SCM跟踪的。SCM跟踪系统框图如图1所示,来波信号经天线反射面进入馈源网络,形成和信号与差信号。差信号经过调制后与和信号合成形成单通道信号。单通道信号经接收及解调出方位误差电压和俯仰误差电压,送给伺服系统,驱动天线始终对准目标。在多模自跟踪系统中,方位误差信号ΔUa和俯仰误差信号ΔUe已经正交混合成ΔUa+ j·ΔUe(j为正交系数)[5]。根据前段误差电压的特点,在进行正交鉴相分离前,加入通道移相器和正交移相器。

图1 单通道单脉冲跟踪系统原理框图
假设目标与天线的角度关系如图2所示。XOY坐标系为垂直于天线电轴的目标平面[2,5]。
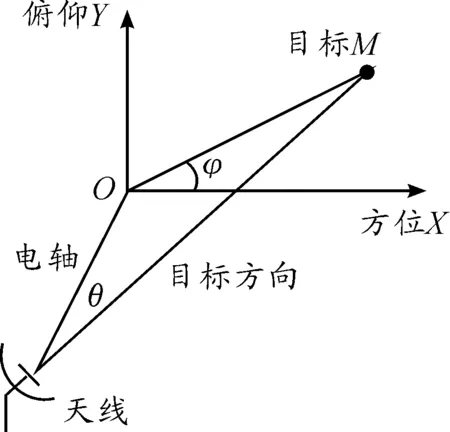
图2 目标与天线的角度关系
当目标偏离天线电轴的角度θ很小时,从天线馈源所激励的和信号与差信号的表达式为
(1)
(2)
式中:A(r)为和信号幅度;wc为载波角信号频率;μ为天线归一化差斜率;φ为跟踪坐标系下目标在目标平面与水平轴X的夹角;γ1为和通道相位;γ2为差通道相位;0~π调相后的差信号为
(3)
式(3)中,ψ(t)为低频调制信号,其波形如图3所示。T为调制周期,F=1/T为调制频率,Ω= 2πF。
(4)

图3 调制信号波形
合成后的单通道信号为
(5)
与本地正交相干载波进行混频、低通滤波处理,再经移相器移相(为使和、差通道相移一致,设通道移相值为γ1,正交移相值为γ2),本地信号sin(ψ(t))混频滤波后得到:
(6)
(7)
以上两式就是解调的方位、俯仰误差电压。
2建立校相模型
目标信号进入天线形成和信号与差信号经过较长的信道才进行单通道合成,和通道与差通道的相位关系随着时间的推移,由于温度、电路参数等因素会发生改变。这种和差相位的相对变化,会引起角误差特性变坏。
从方位俯仰误差的表达式来看,当和、差通道相移不一致时(即Δγ=γ1-γ2≠ 0),便会使方位、俯仰之路相互影响产生交叉耦合。

天线方位正向拉偏误差电压示意图如图 4所示。图4中,Us为存在交叉耦合时的误差电压,UL为没有交叉耦合时理想的误差电压。建立自动校相模型就是通过调整自跟踪参数使得实际误差电压UL变换成理想误差电压Us。自跟踪参数包含通道、正交移相值和增益。

图4 天线方位正向拉偏误差电压示意图
如图4所示,当天线方位正向拉偏时,φ= 0,通道移相值即为Us和UL的角度差λ1。依据Us所在的不同象限利用反三角函数计算得到[8]。
(8)
增益Ka由Us和UL的功率差得到。即
(9)
当天线方位负向拉偏时,φ= π,通道移相值λ2=λ1-π;当天线俯仰正向拉偏时,φ=π/2,正交移相值λ3=λ1-π/2;当天线俯仰负向拉偏时,φ= 3·π/2,正交移相值λ4=λ1-3·π/2。
由于通道移相值在0~2π之间,正交移相值在0~π之间,所以需要对λ1,λ2,λ3,λ4进行适应性调整。最后将天线正偏和副偏计算的增益和移相值求平均及进行合理性检验后,得到方位、俯仰增益和通道、正交移相参数[6-7]。
3自动校相的设计与实现
和差通道移相在自跟踪解调模块之前,由本地两个正交的相位旋转因子与主载波环路输出的两路正交信号进行复乘,在数字域通过相位旋转的方法来实现。这种数字信号补偿的方式比以前通过调节模拟电压来实现移相的方法更为精确和稳定,对自动校相的参数设置也更为简便,有利于设备的一体化设计。
连续波测速雷达的自动校相过程由监控分系统、数字基带分系统和天伺馈分系统协同完成。操作流程是监控分系统完成信道配置,调节联试应答机输出信号为合适电平,使接收机处于中等接收电平;监控分系统发出自动校相命令启动自动校相过程,天伺馈分系统完成天线找零点,记录零点方位、俯仰值,数字基带分系统启动自动校相程序。自动校相流程图如图5所示。

图5 自动校相流程
根据天线的3 dB波瓣宽度,设定天线偏移的角度为8 mil;方位俯仰误差电压的采样间隔为50 ms;天线偏移产生的方位俯仰误差电压采用20点求平均的方式获取。自动校相实现的效果图如图6所示。

图6 自动校相效果图
通过方位正向、方位负向、俯仰正向和俯仰负向拉偏8 mil检查交叉耦合情况,交叉耦合的最大值为1/20。跟踪系统在对目标进行跟踪过程中,将跟踪接收机捕获并连续解调出的误差电压值描绘在直角坐标系上会构成一个点集。将这些点按照时间顺序连接后构成了一个有规律的曲线,称之为误差电压收敛曲线。
4个象限的收敛轨迹曲线如图7所示。从曲线来看,在收敛过程中,轨迹表现为逆时针方向逐渐收敛于零点的螺旋线,曲线的曲率很大,收敛很迅速,具有良好的收敛特性。

图7 收敛轨迹曲线
4结束语
传统的手动校相方法,校相程序复杂、操作时间很长,而采用程序技术实现的自动校相方法简单可行,在短短几分钟内完成,交叉耦合优于1/20,收敛特性好,满足了连续波测速雷达多点频、多设备组合条件下的快速校相,大大缩短了设备参加任务的准备时间。
经过校飞、执行任务等一系列考核,该雷达的自动校相稳定性好、可靠性高,具有很强的实用性。
参考文献:
[1]王玥.单脉冲相控阵雷达通道不一致性校正方法研究[D].成都:电子科技大学,2003.
[2]李靖.TE21模单通道自跟踪系统[J].无线电通信技术,2005,31(6):42-44.
[3]杨锁强,林兴隆.单脉冲跟踪系统中自动校相的设计与实现[J].信息通信,2011(3):23-24.
[4]李靖,李强,李硕.单脉冲跟踪接收机相位自动校正的研究[J].无线电工程,2008,38(5):56-58.
[5]杨峰辉.自动校相技术在现代测控雷达中的实现[J].飞行器测控学报,2003,22(3):45-47.
[6]李白石,徐崇彦,付云起,等.基于曲线拟合的单脉冲跟踪系统校相方法[J].现代雷达,2010,32(12):14-19.
[7]肖凯,周永辉.不完全信号时内部交易[J].重庆工商大学学报:自然科学版,2014,31(2):50-55.
[8]高山,李政.高精度测速设备自动校相模型优化[J].导弹试验技术,2011(3):30-32.
[9]《数学手册》编写组.数学手册[M].北京:高等教育出版社,1979.
[10]高京龙.单脉冲单通道跟踪体制精度分析方法[J].无线电工程,2007,37(7):32-34.
[11]乔博.单脉冲角跟踪系统高精度实时校相技术研究[D].西安:西安电子科技大学,2011.
(责任编辑杨继森)
收稿日期:2015-01-15
作者简介:钟水和(1985—),男,工程师,主要从事航天测控研究。
doi:10.11809/scbgxb2015.07.025
中图分类号:TN953
文献标识码:A
文章编号:1006-0707(2015)07-0097-04
本文引用格式:钟水和,王建,潘尧成,等.单通道单脉冲跟踪系统自动校相的设计与实现[J].四川兵工学报,2015(7):97-99.
Citation format:ZHONG Shui-he, WANG Jian, PAN Yao-cheng, et al.Design and Implementation of Auto Phasing for Single Channel Monopulse Tracking System[J].Journal of Sichuan Ordnance,2015(7):97-99.
Design and Implementation of Auto Phasing for
Single Channel Monopulse Tracking System
ZHONG Shui-he, WANG Jian, PAN Yao-cheng, CHEN Yu-long
(Jiuquan Satellite Launch Center, Jiuquan 732750, China)
Abstract:Aiming at the shortage of long manipulate time and pour precision during the traditional manual phasing, an auto phasing technology of CW velocity radar was put forward. The auto phasing model was established for CW velocity radar which was based principle of single channel monopulse tracking. The program technology was taken for realize the auto phasing of CW velocity radar. The experiment result shows: the cross-coupling is better than 1/20 and the convergence is better than before after taking the auto phasing technology at CW velocity radar.
Key words:single channel monopulse; CW velocity radar; cross-coupling; auto phasing
_______________________
【信息科学与控制工程】
