超导陀螺仪壳体安装误差对转子位置偏移检测的影响
2015-12-28夏芳莉
朱 炼 孙 枫 夏芳莉
(1.安徽工商职业学院,合肥 230041;2.哈尔滨工程大学自动化学院,哈尔滨 150001)
超导陀螺仪是一种高精度磁悬浮陀螺仪,其转子悬浮于低温超导态的工作环境中。与静电陀螺仪利用静电吸引力使转子悬浮的机理不同[1-3],超导陀螺仪是利用超导体在低温超导态下的Meissner效应产生磁悬浮排斥力而使转子悬浮起来[4-7]。超导陀螺仪转子在高速旋转过程中,可能因为电机干扰而产生位置偏移,因此控制偏移的超导陀螺仪转子回复原位是超导陀螺仪研制中需要解决的关键技术之一。随着高精度精密时间间隔计数器的发展[10],使用光电检测法来检测超导陀螺仪转子偏移的技术已经可以实现,并且检测精度更高。本次研究主要针对超导陀螺仪壳体绕OX轴安装误差和壳体绕OY轴安装误差的情况进行分析。
1 超导陀螺仪转子位置偏移的光电检测原理
超导陀螺仪转子位置偏移光电检测系统主要由赤道光电传感器、转子顶部光电传感器、转子顶部的反射平面、转子顶部平面上的刻线及转子表面赤道附近的刻线组成。在超导陀螺仪转子赤道平面的X轴装有光电传感器M1,在超导陀螺仪转子表面赤道附近刻有边长分别为L1、L2及L3、L4的2个球面矩形。图1为超导陀螺仪转子位置偏移光电检测系统示意图。
超导陀螺仪转子顶部平面刻有1个边长为L7、L8的矩形,1个底边长为L5、高为L6的圆弧梯形;超导陀螺仪转子顶部平面上方的A、B点分别安装有光电传感器M2和M3,A点位于圆弧梯形L5的中点处,B点位于矩形L7的中点处。图2为超导陀螺仪转子顶部刻线图。
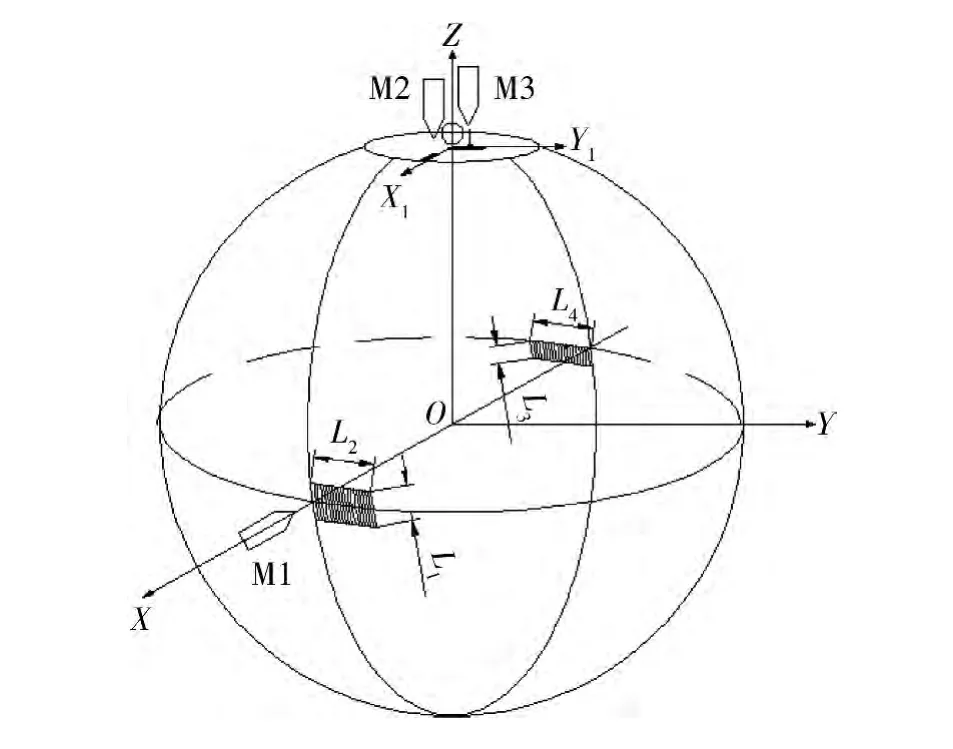
图1 超导陀螺仪转子位置偏移光电检测系统示意图
3个光电传感器发出的光束经高速旋转的超导陀螺仪转子表面后反射回光电传感器。当光反射到刻有图形的区域时产生漫反射,光电传感器接受到弱信号;当光反射到未刻图形的光滑表面时,光电传感器接受到强信号。如果超导陀螺仪转子位置有所偏移,光电传感器接受的强弱脉冲信号的占空比与超导陀螺仪转子无偏移时有所区别。光电传感器接受到的强弱脉冲信号先送到分频器,由分频器输出信号送入高精度的精密时间间隔计数器,再送入专用数字信号处理电路进行处理计算。从专用数字信号处理电路中输出的信号直接显示超导陀螺仪转子位置偏移量,同时输入到控制电路模块中进行处理,得到的控制信号使超导陀螺仪转子回到原来的位置。光电信号处理过程如图3所示。

图2 超导陀螺仪转子顶部刻线图

图3 光电信号处理过程
设超导陀螺仪转子半径为R,超导陀螺仪转子转速为n,顶部反射面的半径为r。以超导陀螺仪转子无偏移无倾角时的状态建立惯性坐标系OXYZ,O为超导陀螺仪的球心,平面OXY在超导陀螺仪赤道平面上,OX轴位于球心O与光电传感器M1的连线上,OY轴位于赤道平面且垂直于OX轴,OZ轴向上垂直于赤道平面。在超导陀螺仪顶部平面建立平面坐标系O1X1Y1,O1位于超导陀螺仪顶部平面圆的圆心,O1X1轴平行于OX轴,O1Y1轴平行于OY轴。
超导陀螺仪转子由于Meissner效应而悬浮于真空低温环境中,光电传感器M1、M2、M3与壳体固连,超导陀螺仪壳体安装误差为超导陀螺仪坐标轴与壳体坐标系之间倾角的大小。当壳体转子绕OZ轴转动一个角度时,并不会对检测系统产生影响。下面分别就壳体绕OX轴、OY轴转动某个角度时的情况进行分析。
2 壳体绕OX轴转动α角时的影响
当壳体绕OX轴转动α角时,并不影响超导陀螺仪转子OZ轴的偏移检测,但对超导陀螺仪转子OX和OY轴的偏移检测产生影响。即对光电传感器M1接受到的强弱信号无影响,对光电传感器M2和M3接受到的强弱信号产生影响。
设壳体绕OX轴转动角度α逆时针为正值,顺时针为负值,以超导陀螺仪转子旋转1周为例进行分析。
2.1 超导陀螺仪转子的位置无偏移时
当超导陀螺仪转子的位置无偏移时,M2接受到弱信号的时间t1为:

M3接受到弱信号的时间t2为:

2.2 超导陀螺仪转子位置在X、Y轴上有偏移时
当超导陀螺仪转子在X轴、Y轴分别有位置偏移ΔX、ΔY时,M2接受到弱信号的时间t3为:

M3接受到弱信号的时间t4为:

3 壳体绕OY轴转动β角时的影响
当壳体绕OY轴转动角度β时,将对超导陀螺仪转子OX,OY,OZ轴的偏移检测产生影响,即对光电传感器M1,M2,M3接受到的强弱信号产生影响。
设壳体绕OX轴转动角度β逆时针为正,顺时针为负,并以超导陀螺仪转子旋转1周为例进行分析。
3.1 超导陀螺仪转子的位置无偏移时
当超导陀螺仪转子的位置无偏移时,M2接受到弱信号的时间t5为:

M3接受到弱信号的时间t6为:

当壳体绕OY轴逆时针转动β角时,M1两次经过刻线部分;当壳体绕OY轴顺时针转动β角时,M1经过刻线部分1次。每次经过刻线部分的时间t7如式(7)所示:

3.2 超导陀螺仪转子的位置在X、Y轴有偏移时
当超导陀螺仪转子在X轴和Y轴分别产生位置偏移ΔX和ΔY时,只影响光电传感器M2和M3接受到的强弱信号。
M2接受到弱信号的时间t8为:

M3接受到弱信号的时间t9为:

3.3 超导陀螺仪转子的位置在Z轴有偏移时
超导陀螺仪转子在Z轴的偏移,只影响光电传感器M1接受到的强弱信号。
当超导陀螺仪转子在Z轴负向偏移为ΔZ,壳体绕OY轴转动角度β为顺时针时,或者当超导陀螺仪转子在Z轴正向偏移ΔZ,壳体绕OY轴转动角度β为逆时针时,M1接受到弱信号的时间t10为:

当超导陀螺仪转子在Z轴负向偏移ΔZ1,壳体绕OY轴逆时针转动角度β且当时,M1经过刻线部分1次。当超导陀螺仪转子在Z轴负向偏移ΔZ1,壳体绕OY轴逆时针转动角度β且时,M2经过刻线部分2次。M1每次经过刻线部分的时间t11为:

当超导陀螺仪转子在Z轴正向偏移ΔZ2,壳体绕OY轴顺时针转动角度β且当时,M2经过刻线部分2次;当超导陀螺仪转子在Z轴正向偏移ΔZ2,壳体绕OY轴顺时针转动角度β且当时,M1经过刻线部分1次。M1每次经过刻线部分的时间t12为:

4 仿真结果分析
超导陀螺仪转子为中空石英球,球体表面镀有2 mm厚的铌层,总直径为50 mm,转子顶部反射平面直径为15 mm。刻线图形的尺寸分别为L1=3 mm,L2=10 mm,L3=1.5 mm,L4=10 mm,L5=3 mm,L6=1 mm,L7=3 mm,L8=1 mm,O1B=1.5 mm,O1A=6 mm。超导陀螺仪转速为10 000 r/min。
当壳体绕OX轴转动α角并且超导陀螺仪转子的位置无偏移时,M2和M3接受到弱信号的时间t1,t2与α之间的关系分别如图4和图5所示。
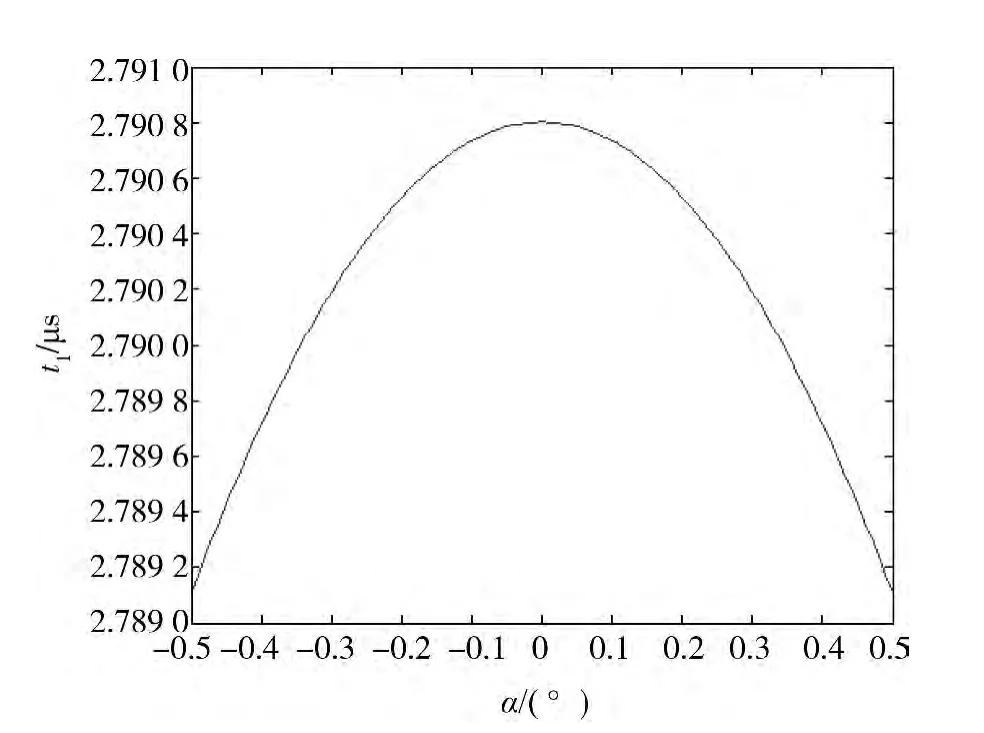
图4 t1与α的关系曲线
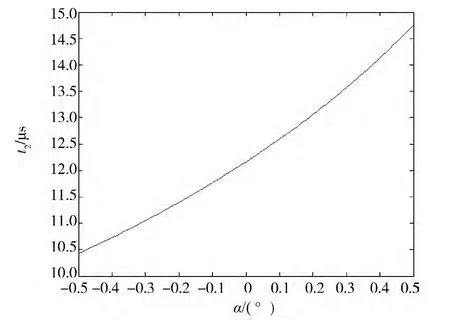
图5 t2与α的关系曲线
当壳体绕OY轴转动β角并且超导陀螺仪转子的位置无偏移时,M2,M3,M1接受到弱信号的时间t5,t6,t7与β之间的关系分别如图6— 图8所示。
由图6—图8可以看出,壳体绕OX轴的转角安装误差对光电传感器M3接受到的强弱信号的时间影响最大。壳体绕OY轴的转角安装误差对光电传感器M2和M3接受到的弱信号的时间产生的影响大于对光电传感器M1接收弱信号时间产生的影响。超导陀螺仪转子的位置有偏移时,壳体的安装误差对光电传感器接受到强弱信号的时间的影响与超导陀螺仪转子的位置无偏移时接近。
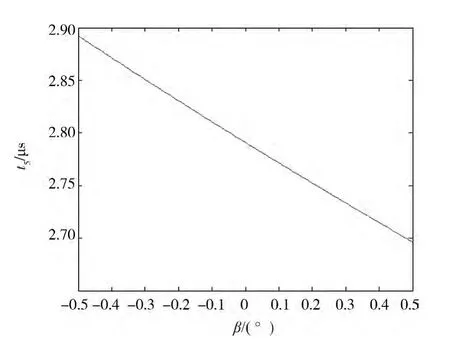
图6 t5与β的关系曲线

图7 t6与β的关系曲线

图8 t7与β的关系曲线
5 结语
超导陀螺仪转子位置偏移控制是超导陀螺仪研制中的关键技术之一,而超导陀螺仪转子位置偏移的检测精度是超导陀螺仪转子位置偏移控制的关键指标。超导陀螺仪壳体的安装误差在10-1数量级时,对光电传感器接受强弱信号的时间产生10-2μs,甚至是10-1μs数量级的影响。随着超精密安装技术的发展,超导陀螺仪的精度研究将有望再获突破。
[1]韩丰田,李冬梅,高钟毓,等.静电球轴承的力模型及起支仿真研究[J].机械工程学报,2005,41(2):92-96.
[2]Tsai N C,Sue C Y.Experimental Analysis and Characterization of Electrostatic-drive Tri-axis Micro-gyroscope[J].Sensors and Actuators A:Physical,2010,158(2):231-239.
[3]吴秋平,韩丰田.基于半球支承的静电悬浮方法[J].东南大学学报(自然科学版),2005,35(4):553-557.
[4]刘建华,王秋良,严陆光,等.一种超导磁悬浮系统的设计及悬浮力特性分析[J].电工技术学报,2010,25(10):1-5.
[5]胡新宁,赵尚武,王厚生,等.超导球转子悬浮特性分析及实验研究[J].稀有金属材料与工程,2008,37(增刊4):436-439.
[6]LIU Jianhua,WANG Qiuliang,YAN Luguang,et al.A-nalysis of Force Characteristics of a Superconducting Ball in a Given Magnetic Field[J].Physica C,2009,469(13):756-759.
[7]郭仁春,王金星.超导悬浮系统悬浮力磁滞性质数值分析[J].低温与超导,2008,36(5):30-32.
[8]商木喜,戴银明,王秋良.一种基于迈斯纳效应的超导电机[J].低温物理学报,2005,27(5):951-956.
[9]杨再敏,胡新宁,崔春艳,等.一种基于迈斯纳效应的超导电机的驱动力的计算[J].低温与超导,2007,35(6):505-508.
[10]赵侃,梁双有,陈法喜,等.精密时间间隔计数器的研制[J].中国科学:物理学 力学 天文学,2011,41(5):602-606.
