结构地震响应控制的优化方法
2015-12-28代建波王社良
代建波,王社良,赵 祥
(1.西安石油大学 机械工程学院,西安 710065;2.西安建筑科技大学 土木工程学院,西安 710055)
结构地震响应控制的优化方法
代建波1,王社良2,赵 祥2
(1.西安石油大学 机械工程学院,西安 710065;2.西安建筑科技大学 土木工程学院,西安 710055)
针对大跨空间结构地震响应主动控制,以超磁致伸缩材料为核心元件设计了一种可以应用于大跨空间结构振动主动控制中的超磁致伸缩作动器,制作出了作动器的原型并对其进行了输出性能测试。使用遗传算法对大跨空间结构主动控制作动器的布置位置进行了优化设计,最后进行了优化效果的数值模拟分析。以此验证了超磁致伸缩作动器具有良好的作动效应,利用遗传算法在大大提高结构主动控制优化设计效率时,可以保证实现对结构的整体优化以及作动器能高效、经济地实现对结构进行主动控制的目的。
振动与波;大跨空间结构;地震响应;主动控制;超磁致伸缩作动器;遗传算法
空间结构的跨度不断增大,在外界动力荷载作用下,往往会发生大幅度的振动,以致会影响整个建筑的正常使用甚至造成破坏。结构振动控制可以有效地减少结构在风、地震等动力作用下的反应和损伤积累,有效地提高结构的抗震能力和抗灾性能,是结构抗震减灾积极有效的方法和技术[1]。被动、半主动控制技术在土木工程中得到了很好地、广泛地研究及应用,而运用智能材料制作作动器进行结构地震响应主动控制具有灵活性、智能性、高效性等优点,可以更好的实现结构的振动控制。
超磁致伸缩材料GMM(Giant Magnetostrictive Material)是一种新型的智能材料,在磁场作用下,长度及体积均发生变化而对外做功,去掉外磁场后,又可以恢复原来的尺寸,因而能高效地实现电磁能与机械能之间的相互转换,是重要的能量与信息转换功能材料[2]。用GMM制作的作动器具有磁致伸缩应变量值大、能量转换效率高、工作电压低、响应速度快、承载能力强等无可比拟的优良特性,因而非常适宜用于大跨空间结构振动的主动控制[3]。
结构主动控制中一个重要的问题就是作动器位置的布置。虽然较多的作动器较易达到控制的目的,但会增加主动控制的实施难度和成本;因此,在作动器数目一定的条件下寻求最优布置位置以取得较高的控制效率对于主动控制就具有重要的意义。
1 GMM作动器的结构设计及性能试验
1.1 GMM作动器总体结构设计
图1为本文设计的GMM作动器的总体结构示意图,图2为GMM作动器实物图。作动器包括外套、探测线圈、偏置线圈、激励线圈、线圈骨架、GMM元件、作动杆、连接杆、预压碟簧和调节螺母等,通电后偏置线圈、激励线圈提供叠加磁场,单层探测线圈用于测量磁场的大小。GMM是低磁导率材料,为了尽大可能的提高其工作效率,设计了由GMM元件和高导磁外套筒构成的闭合磁路。因为外套筒的高导磁率,磁通几乎全部被限制于外套筒中,磁力线沿着外套筒的路径流通,均匀穿过GMM元件且于其伸长方向一致,从而降低了漏磁。在GMM元件伸长方向上用碟簧加一足够大的反力,可起到预紧及增加位移输出量的作用。为了可以控制施加的力的大小,在弹簧上部设计了调节螺母以调节碟簧预压力的大小。当激励线圈通以电流信号时产生磁场,GMM元件产生伸长变化且伸长效应通过作动杆输出给作动对象,断掉电流信号后磁场消失,GMM元件恢复原来形状,完成此作动器的作动效应。

图1 GMM作动器总体结构示意图

图2 GMM作动器实物图
1.2 GMM作动器输出性能
通过多功能力学试验机对制作的GMM作动器进行了输出性能测试,如图3所示。图4为不同预压力作用下(0~20 MPa)作动器的输出力随电流强度(0~3.0A)变化的曲线图。

图3 GMM做动器输出性能测试试验
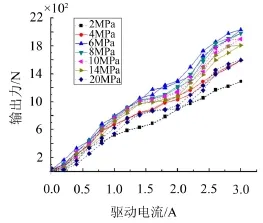
图4 GMM作动器力输出性能
由图4可知,在一定驱动电流作用下,随着预压力的增大,作动器的输出力开始增大,但是到6 MPa后,由于预压力过大,输出力开始缓慢下降。因此作动器预压应力设计值定为6 MPa。而在6 MPa的预压应力下,随着驱动电流的增大,作动器的输出力增大,在最大电流3A驱动下可以产生2 033 N的输出力,且输出力—驱动电流基本呈线性关系。
2 基于遗传算法的GGMMMM作动器布置位置优化
结构主动控制中一个最重要的问题就是作动器位置的布置。在作动器数目一定的条件下如何找到使结构振动主动控制效果达到最优时的作动器的布置位置值得深入研究。
2.1 优化性能指标
作动器位置优化的关键就是找出一个评价大跨空间结构振动控制作动器布置位置优劣的性能指标。为了简化推导,作出了以下假设:大跨空间结构中的杆件完全铰接,结构振动完全处于弹性范围内,不考虑作动器对大跨空间结构的质量、刚度矩阵的影响,结构的振动模态不会发生耦合现象。根据结构动力学可知,受控结构的动力方程可表示为[1]

其中M、C和K分别是质量、阻尼和刚度矩阵,X(t)分别为加速度、速度和位移向量。F(t)为外扰力向量,U(t)为控制力向量,Bs为作动器的位置矩阵,它由作动器的方向余弦组成,Ds为外扰力的位置矩阵。不考虑外扰力的作用,将式(1)转换成模态方程。结构的第i个模态方程为

对向量Bi进行奇异值分解得

若模态qi可控,则矩阵Bi的奇异值矩阵可表示为:



利用新的模态坐标进行转换得



其中γi代表了结构中第i个受控模态的重要程度,因为结构振动的能量主要来自于地震,可以取γi为在地震影响系数曲线上ωi所对应的值。性能指标J的值越大,作动器的布置就越优越,即对结构的控制效果就越好。
2.2 适应度函数
利用2.1中所提出的性能指标进行优化,通过Matlab软件建立优化模型。由于Matlab软件中的GADS工具箱进行遗传算法优化时,只能求得适应度函数的最小值,所以如要得出规定好的作动器的数目的优化位置,必须将上面求得的性能指标进行一些调整,从而得到适应度函数

其中J0为调整前的适应度值,p为当前布置的作动器数目,m为预期布置的作动器数目。
2.3 数学模型
优化布置准则具有多样性,对于建筑结构,基于安全性的要求,运用最大耗能原则和结构模态可控度的准则,求出的适应度值越小,代表结构的控制效果越好,作动器布置越优越。

2.4 遗传算法优化步骤
针对大跨空间结构作动器优化布置问题,应用遗传算法,采用以下步骤进行优化[6]。
(1)编码与建立初始种群
针对本文研究对象,采用二进制码对个体进行编码,编码长度为(r即大跨空间结构一共有r根杆件),假如第i个基因座的值为1,表示第i根杆上布置了作动器,若第i个基因座的值为0,表示该根杆上没有布置作动器。设置初始种群为30个;
(2)适应度函数
适应度函数是用于对个体评价的标准,也是优化过程进行的依据,表明个体和解的优劣性。针对文中研究对象,利用提出的性能指标,即可进行适应度函数的编制,建立优化模型;
(3)选择、交叉和变异操作
采用最佳保留选择,以保证群体中的个体的适应度值不断接近最优解,并设置交叉概率为0.8,变异概率为0.05,以增加种群的多样性;
(4)算法终止条件
本文设置的算法终止条件为运算最大代数为200代,稳定代数为50代。整个遗传算法优化流程如图5所示。

图5 遗传算法优化流程图
3 GMM作动器布置位置优化算例分析
3.1 计算模型
某大跨空间网架结构,如图6所示,跨度40 m×40 m,高度4 m,倒放四角锥,杆件全部采用铰接,所有杆件均采用Φ30×2的钢管,结构的4个角点固结。此网架结构共有50个节点,160个杆件。应用遗传算法,通过Matlab软件进行编程,在放置10、20、30个作动器的条件下对此空间网架结构进行作动器布置位置优化计算。

图6 大跨空间网架结构模型
3.2 优化结果
按照上述遗传算法优化步骤对分别配置10、20、30个作动器时的大跨空间结构主动控制进行优化设计,优化参数选择如表1所示。

表1 遗传算法优化参数设置
表2给出了作动器优化结果,图7—图9分别为配置10、20、30个作动器时适应度曲线图。

表2 不同数目作动器的优化后的布置位置

图7
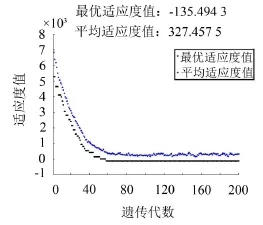
图8
由图7—图9的适应度曲线图可以看出每个适应度曲线中的适应度值随着遗传代数的增加都是不断减小的,表明适应度值是处于逐渐收敛的状态,相应的优化性能指标J不断增大,在GMM作动器数量一定的情况下,J越大表明GMM作动器的布置位置越优越,从而证明了利用遗传算法对空间网格结构中GMM作动器布置位置优化计算的可行性。从图中还可以看出,随着GMM作动器数量增多,适应度值逐渐减小,而且更快的趋向于最优解,说明随着GMM作动器数量的增多,对结构的控制效果越来越好,而且可以更快的得出优化布置方案。从图中还可以看出,配置30个作动器时,种群适应度在第25代收敛,目标函数计算不足800次,而采用穷举法需要计算次,从而证明了利用遗传算法对网架进行作动器位置优化的高效性。

图9
图10—图12分别是布置10、20、30个作动器时,经过遗传算法优化后作动器的布置位置图。可以看出,作动器的位置集中在结构的四角和跨中,即在网架各阶模态的节点附近,也就是结构各阶振型变形最大的地方,具有明确的物理意义。由于结构形式完全对称,作动器布置位置同时具有对称性,并且随着作动器数目的增多更加趋于均匀对称。

图10 10个作动器的优化布置图

图11 20个作动器的优化布置图

图12 30个作动器的优化布置图
3.3 优化结果有效性分析
为了证明利用遗传算法进行作动器布置位置优化的可行性和有效性,在布置30个作动器的情况下,采用LQR控制算法[7,8],对优化时采用的网架模型进行振动控制分析,分三种工况进行优化前和优化后的控制效果对比。在结构中输入一条400 gal的X方向ELCENTRO波,故结构以水平振动为主,但大跨结构的竖向振动和位移不能忽略,故对跨中的23、25、26三个节点的X方向和Z方向进行控制效果的对比,并引入了2个控制效果系数,对比结果见表3,选取23节点两个方向的位移时程曲线对比如图13和图14所示。

表3 三种工况下控制效果的对比
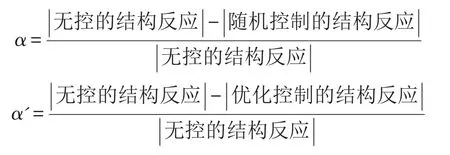
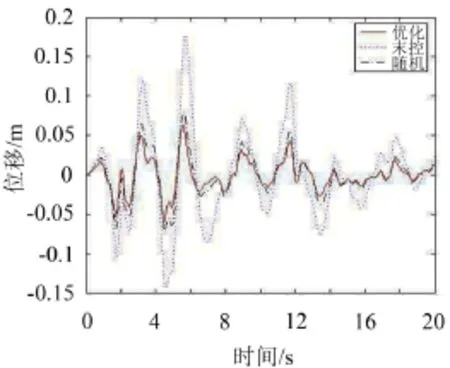
图13 23节点X方向位移时程曲线对比图

图14 23节点Z方向位移时程曲线对比图
由表3可知,采用30个作动器对模型结构进行主动控制,作动器位置采用随机布置方式时,23节点X方向最大有55%的控制效果,Z方向最大有40%的控制效果。作动器位置采用优化布置方式时,23节点X方向最大有64%的控制效果,Z方向最大有57%的控制效果,比随机控制时的控制效果分别增加了9%和17%。其它节点的控制效果也均有了较明显的提高。证明了应用GMM作动器进行结构振动主动控制的可行性及应用遗传算法进行对作动器布置位置优化的有效性。
4 结语
本文以GMM为核心元件设计制作了适合于土木工程结构的GMM作动器,并进行了性能测试。同时利用基于遗传算法这一先进的优化方法对作动器进行了优化配置并进行了大跨空间网架结构控制效果的数值模拟分析,得到了以下结论:
(1)在充分研究了GMM磁控特性的基础上,结合结构主动控制的特点设计了一种适合于土木工程结构的GMM作动器,并制作出了作动器的原型,并对GMM作动器进行了输出性能测试试验,分析了输出力与驱动电流的关系;
(2)提出了在规定作动器数目的情况下评价平板网架结构振动主动控制作动器布置位置优劣的适应度函数;
(3)基于遗传算法这一先进的优化方法,对平板网架结构主动控制中作动器的布置位置进行了优化设计,利用MATLAB编写了适应度函数程序并应用GADS工具箱进行了优化计算,在提高优化设计计算效率的同时,保证了实现对结构的整体优化,避免陷入局部优化,达到高效、经济的对结构进行主动控制的目的;
(4)应用MATLAB编写了LQR控制算法程序对平板网架结构进行了主动控制的动力时程分析。通过结构在多种不同工况条件下控制效果的对比,验证了应用遗传算法对作动器布置位置优化的有效性和应用GMM作动器进行结构振动主动控制的可行性。
[1]欧进萍.结构振动控制—主动、半主动和智能控制[M].北京:科学出版社,2003.
[2]李梅,吕银芳.超磁致伸缩材料及其应用[J].现代电子技术,2005,18:114-117.
[3]方紫剑,王传礼.超磁致伸缩材料的应用现状[J].煤矿机械,2006,27(5):725-726.
[4]张东昱.双层柱面网壳主动控制及其优化研究[D].北京:北京工业大学,2001.
[5]周明,孙树栋.遗传算法原理及应用[M].北京:国防工业出版社,1999.
[6]雷英杰.MATLAB遗传算法工具箱及应用[M].西安:西安电子科技大学出版社,2005.
[7]莫凡芒,孙庆鸿,陈南等.遗传算法在结构振动主动控制中的应用研究[J].噪声与振动控制,2003(2):11-12+16.
[8]王社良,纪庆波,代建波等.基于超磁致伸缩作动杆的结构振动主动控制研究[J].噪声与振动控制,2010(6):23-26+42
Optimization Method for Structural Seismic Response Control
DAI Jian-bo1,WANG She-liang2,ZHAO Xiang2
(1.School of Mechanical Engineering,Xi’an Shiyou University,Xi’an 710065,China; 2.School of Civil Engineering,Xi’an University ofArchitecture and Technology,Xi’an 710055,China)
An actuator with giant magnetostrictive material(GMM)as the main components was designed for active vibration control of large-span spatial structures in earthquake situations.The prototype actuator was produced and the output performance was tested.The genetic algorithm was used to optimize the actuators layout in the large-span spatial structures.Numerical results of the optimization show that the GMM actuator has good vibration control efficiency.The genetic algorithm can greatly raise the effectiveness for the optimal design of the active control of the structures and guarantee the optimization of the overall structure. By optimizing the layout of the actuators,the active control of the structures can be realized effectively and economically.
vibration and wave;large-span spatial structure;seismic response;active control;GMM actuator;genetic algorithm
TB53;TU399
:A
:10.3969/j.issn.1006-1335.2015.01.009
1006-1355(2015)01-0042-06
2013-05-30
国家自然科学基金资助项目(51178388,51405385);西安石油大学青年科技创新基金项目(2013BS024);陕西省重点实验室访问学者项目(14JS045)
代建波(1983-),男,讲师,博士,主要从事结构振动控制等方面的研究。
王社良(1957-),男,教授,博士生导师,主要从事结构振动控制、结构抗震等方面的研究。E-mail:wangshel@aliyun.com.
