移动式动态线路加载车跟随系统的设计与实现
2015-12-22柴雪松暴学志
杨 亮,柴雪松,金 花,暴学志,潘 振
(1.中国铁道科学研究院 铁道建筑研究所,北京 100081;2.高速铁路轨道技术国家重点实验室,北京 100081)
移动式动态线路加载车跟随系统的设计与实现
杨 亮1,2,柴雪松1,2,金 花1,2,暴学志1,2,潘 振1,2
(1.中国铁道科学研究院 铁道建筑研究所,北京 100081;2.高速铁路轨道技术国家重点实验室,北京 100081)
移动式动态线路加载车通过曲线时,如不主动控制,安装在仪器车车底的刚度检测架与轨道之间会有偏移,当曲线半径很小时,刚度检测架上的激光位移传感器就会超出量程,造成曲线地段轨道刚度无法测量。为此,设计了刚度检测架跟随系统。本文介绍了跟随系统的机械结构设计和运动控制软硬件设计。目前该系统已成功应用到移动式动态线路加载车上。
移动式动态线路加载车 轨道刚度 跟随系统 设计
移动式动态线路加载车是由中国铁道科学研究院铁道建筑研究所研发的新型轨道检测车辆。它能在运行中对轨道施加载荷,模拟列车运行时与轨道之间的相互作用,通过测量钢轨位移来计算轨道的刚度[1],找出轨道病害位置。移动式动态线路加载车由两节车组成(图1),一节为动力车,一节为仪器车[2-3]。两车车底中部的刚度检测架上安装有激光位移传感器,加载车工作时激光位移传感器实时检测钢轨的位移,以轻车测得的位移为基准,通过轻重两车测量位移差值计算出试验区段轨道的连续刚度。

图1 移动式动态线路加载车
当移动式动态线路加载车通过小半径曲线时,由于仪器车车体很长,车体中部与轨道之间会有偏移。仪器车通过半径为300 m的曲线时理论计算的偏移量可达±135 mm,加之轨道游间[4]、钢轨变形、车体晃动等的影响,实测的最大偏移量可达±180 mm。安装在仪器车车底中部刚度检测架上的激光位移传感器量程为±100 mm。如果刚度检测架固定在仪器车车底中部,移动式动态线路加载车在通过小曲线半径轨道时激光位移传感器会超出量程,无法测得轨道的刚度。因此,需要设计跟随系统,以控制激光位移传感器实时检测传感器与钢轨之间的位置偏差,使激光位移传感器与轨道的间距始终在量程范围之内。动力车上的刚度检测架安装在移动加载架上,当通过曲线轨道时刚度检测架随着移动加载架运动,激光位移传感器测得的位移始终在其量程范围之内,因此动力车不需要跟随系统。
1 跟随系统结构设计
1.1 跟随系统理论分析
移动式动态线路加载车通过不同曲线半径的轨道时刚度检测架与轨道之间的最大偏移量是不同的,曲线半径越小偏移量越大。仪器车前后转向架相距18 m[5],根据移动式动态线路加载车的工作环境和国内轨道曲线半径的实际情况,最小通过曲线半径按350 m计算。同时,考虑游间与车体晃动的影响,通过曲线时最大偏移量可达165 mm。设计时留有一定的余量,按180 mm计算。移动式动态线路加载车速度为60 km/h,缓和曲线长度80 m,则通过缓和曲线进入350 m半径曲线的平均时间t=(80+18)/(60/3.6)≈5.90 s,则跟随系统的平均跟随速度v=180/t≈30.5 mm/s。可知,选择推杆时其跟随速度应>30.5 mm/s。
1.2 结构方案对比
跟随系统的机械结构需满足保持刚度检测架在车体前后方向(列车运行方向)稳定,左右方向(垂直轨道方向)随着车体过曲线产生的偏移而摆动。根据上述要求提出了2种设计方案,如图2所示。
方案1采用旋摆机构,刚度检测架通过旋转杆悬挂在仪器车底部中间,旋转杆上端通过悬挂支撑座固定在车底底座,下端通过杆端关节轴承与刚度检测架相连。当推杆运动时旋转杆带动刚度检测架前后摆动。方案2采用滑槽机构,仪器车底部中间固定杆下端是滑槽,刚度检测架连接到滑槽中的滑轮上,当推杆运动时带动刚度检测架在滑槽内移动。方案1、方案2都能满足功能需求,方案1机构更简便,方案2滑槽需频繁外伸,易造成安全隐患,故设计时采用方案一。
电动推杆的前后端安装有磁感应限位开关并接入控制回路,当推杆前后移动触碰到限位开关时刚度检测架已偏离车体中线设定的极限距离,存在一定的危险性,系统检测后会报警并限制推杆向危险的方向移动,只可以往相反的方向移动。
1.3 旋摆机构下的跟随计算公式推导
采用旋摆机构设计时移动式动态线路加载车通过曲线轨道时激光位移传感器检测到的偏移量(刚度检测架与轨道的偏移量)并不是推杆的实际需要的伸缩量,而运动控制程序直接控制的是推杆的伸缩量,因此,需要推导出激光位移传感器检测到的偏移量与推杆实际需要的伸缩量之间的关系。如图3所示,实线表示初始位置时推杆和刚度检测架的状态,虚线表示跟随到某一位置时推杆和刚度检测架的状态,通过两个直角三角形关系可推导出推杆伸长距离与跟随架水平移动距离的数学关系式。
设推杆原长为L,跟随架连接杆长度为a,跟随架水平移动的距离为y,刚度检测架跟随时上移的高度为h,则

图3 跟随系统结构关系示意

以上两式消掉h,则可推导出推杆伸长的距离x与跟随架水平移动的距离y的关系式为

2 跟随系统运动控制软硬件设计
2.1 控制方式对比
跟随系统的运动控制实际上是对伺服电机的控制。常见的伺服电机控制设备有单片机系统、可编程逻辑控制器(PLC)和运动控制卡[6]。单片机系统和可编程逻辑控制器是独立运行的设备,运动控制卡则安装在其他主机上便可运行。此外,运动控制卡造价要低于前二者。因此,本文采用运动控制卡来控制伺服电机。这种方案可充分利用计算机资源。运动控制卡直接安装在刚度检测计算机上,刚度检测计算机接收到激光位移传感器实时检测的数据,算出位移偏差后生成控制命令并通过运动控制卡发送给伺服控制器。运动控制卡只需要从微机接收控制命令,将有关的运动控制信号发送给驱动器即可。驱动器再将数字脉冲量信号放大,驱动电机转到目标位置,从而带动推杆的前后运动,实现跟随的目的。
2.2 硬件组成与参数
跟随系统硬件由运动控制卡、伺服电机、驱动器、推杆等组成。采用固高GE-200-PG-PCI-G运动控制卡,该卡是基于PCI总线的脉冲输出型卡,设置每发10 000个脉冲电机转一圈。推杆选择无锡艾尔特生产的LT30-500,推杆最大速度为46 mm/s,行程为±180 mm,最大推力为250 kg。与此所匹配的电机型号为台达ECMA-C30804E7,该电机额定功率450 W,额定转速为3 000 r/m。伺服驱动器的型号为ASDA0421AB。
2.3 程序设计
跟随系统运动控制代码采用VC++编写,并当作子程序嵌入到刚度检测主程序中。为了不影响刚度检测数据采集及处理,主程序开辟一个新线程专门处理跟随系统的运动控制,程序流程如图4所示。
跟随系统工作时运动控制子程序每10 ms从刚度检测主程序处理结果中取一次数据,得到激光位移传感器与钢轨之间的偏移距离。当激光位移传感器与钢轨偏距的绝对值比正常值>5 mm便启动跟随命令,刚度检测架在推杆的作用下向左或向右移动。同时,运动中系统时刻检测推杆是否触发了前后限位开关,如触碰则报警,此时推杆可以反方向运行到安全位置。
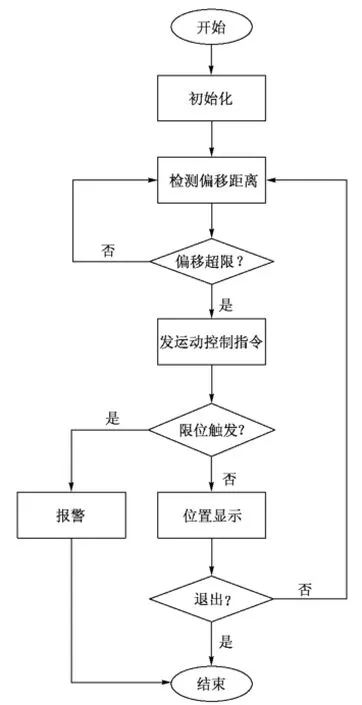
图4 跟随系统程序设计流程
3 跟随系统的运行试验
跟随系统安装调试后进行了多次运行试验(图5),主要验证推杆的跟随距离和跟随速度。移动式动态线路加载车以60 km/h的速度运行,激光位移传感器检测刚度检测架与轨道之间的偏距后自动启动跟随动作,当通过半径为350 m的曲线轨道时最大前伸量为168 mm,最大后退量为-163 mm,跟随距离行程为±180 mm,能满足通过350 m曲线轨道的要求。同时,激光位移传感器在推杆的作用下一直保持在量程范围之内,跟随速度满足实际需要。

图5 跟随系统运行试验
4 结语
本文给出了移动式动态线路加载车跟随系统的机械结构设计和软硬件设计方案。目前跟随系统已成功运用到加载车上,经过多次试验证明该系统稳定、可靠。跟随系统已在轨道刚度的测量中发挥了重要作用。
[1]赵国堂.铁路轨道刚度的确定方法[J].中国铁道科学,2005,26(1):1-6.
[2]中国铁道科学研究院.高速铁路线路动态加载技术及试验装备研制[R].北京:中国铁道科学研究院,2011.
[3]杨亮,柴雪松,李伟,等.移动式线路动态加载车液压加载系统设计[J].铁道建筑,2014(4):110-113.
[4]郝瀛.铁道工程[M].北京:中国铁道出版社,2002.
[5]南车南京浦镇车辆有限公司.移动式线路动态加载试验车仪器试验车设计方案[R].南京:南车南京浦镇车辆有限公司,2010.
[6]姜荣.一种基于运动控制卡的伺服电机控制系统[J].机电产品开发与创新,2006,19(3):113-114.
Design and implementation on follow-up system of Chinese track loading vehicle
YANG Liang1,2,CHAI Xuesong1,2,JIN Hua1,2,BAO Xuezhi1,2,PAN Zhen1,2
(1.Railway Engineering Research Institute,China Academy of Railway Sciences,Beijing 100081,China; 2.State Key Laboratory for Track Technology of High-speed Railway,Beijing 100081,China)
The track loading vehicle requires active control at curve section,as the stiffness detecting frame attached to bottom of the vehicle may deviate from the track.This is particularly true when the curve radius is kept at a relatively lower level,as the outranged values the laser displacement sensor picks up fail to reflect the track stiffness status.Therefore,a follow-up system was designed for this situation.Its mechanical structure,software and hardware for motion control are introduced in this paper.The system has been successfully applied to track loading vehicle. Key words:T rack loading vehicle;T rack stiffness;Follow-up system;Design
U216.6
A
10.3969/j.issn.1003-1995.2015.01.18
1003-1995(2015)01-0080-04
(责任审编 李付军)
2014-06-12;
2014-07-20
铁道部科技研究开发计划项目(2008G031-O)
杨亮(1982—),男,山东滕州人,助理研究员,硕士。
