信号交叉口倒计时显示对驾驶决策的影响分析
2015-12-15吴娟莉阳光学院土木工程系福建福州350015
吴娟莉(阳光学院 土木工程系,福建 福州350015)
信号交叉口倒计时显示对驾驶决策的影响分析
吴娟莉
(阳光学院 土木工程系,福建 福州350015)
倒计时对信号交叉口的影响主要表现为对驾驶行为的影响。为量化驾驶行为规律,研究倒计时交叉口驾驶决策模型,探索其对通行效率的作用效果,以福州市典型交叉口为例,分析倒计时对信号交叉口驾驶决策的影响,以期为交通管理部门选用此类设施提供参考。
倒计时;信号交叉口;驾驶决策;二项Logistic模型
信号交叉口倒计时是配合交通信号灯,显示当前信号相位剩余时间,以提示车辆与行人提前做好通行准备的辅助装置。综合国内外倒计时的使用情况,多地在是否安装倒计时上意见不一。有的认为红灯倒计时能使驾驶员提前知晓绿灯启亮时间,从而及时完成车辆启动前的一连串动作,节约启动时间,减小延误,提高路口的通行效率;而有的认为倒计时易引起抢灯行为,这就需要更大的绿灯间隔时间来保障安全,会降低交叉口的效率。可见,倒计时对信号交叉口的影响主要表现为对驾驶行为的影响。基于此,通过建立有无倒计时状态下的驾驶决策模型,分析倒计时对驾驶决策的影响。
1 数据采集与处理
选择条件相近的有倒计时和无倒计时信号交叉口为研究对象,其几何条件、环境条件、信号控制及交通条件都很接近,且为相邻交叉口,可类比同一个交叉口安装倒计时前后的情况。以福州市6个交叉口为例:洪甘路—梅亭路交叉口(无倒计时),洪甘路—梁厝路交叉口(有倒计时);卢滨路—金洲南路交叉口(无倒计时),卢滨路—建新中路交叉口(有倒计时);上三路—南台路交叉口(无倒计时),上三路—首山路交叉口(有倒计时)。其中,前4个交叉口的数据用来标定驾驶决策模型参数,后两个交叉口的数据用来验证驾驶决策模型。
采用现场观测与视频摄像相结合的方法,由于所选交叉口限速为50 km/h,根据交叉口视距要求,确定距停车线90 m以内为观察范围[1]。选取时间为任两个工作日晚高峰17:00~19:00,连续进行视频拍摄,调查当日均为晴朗天气。为排除车辆所受其他因素干扰,不考虑非机动车和行人等的影响。
数据处理依据驾驶行为决策机理。驾驶人在信号交叉口处的判断决策属于风险型决策,即可供选择的方案中,存在两种或两种以上的自然状态,且每种状态所发生的概率是可以估计的[2]。当行驶至交叉口时,驾驶人很难预知自己所处的环境状态。通常,为节省时间,驾驶人倾向于尽快通过交叉口,但由于未知风险的存在,如冲突或碰撞等,就需驾驶人作出相应决策,选择通过交叉口或选择停止。而倒计时可以提醒驾驶员灯色发生改变的时间,帮助驾驶员在“通过”和“停止”两者间作出合适的选择[3-4]。因此,选取驾驶人在绿灯剩余10 s和黄灯期间的决策行为进行分析。
2 倒计时影响下的驾驶决策模型建立
通过对绿灯最后10 s和黄灯期间位于进口道90 m范围内的车辆进行分析,利用二项Logistic模型建立有无倒计时信号交叉口驾驶人通过决策模型。
2.1 驾驶行为决策影响因素
众多因素影响着交叉口驾驶行为。驾驶人行驶至信号交叉口处,首先对周围环境进行感知,获取多源信息,其次对信息进行处理,从而进一步作出判断决策,以致产生相应的行动后果。驾驶行为决策是驾驶人自身因素、车辆因素、道路环境因素等多种因素共同作用的结果[5]。根据实验条件,选取车型、绿灯剩余时间及黄灯时间、距停止线距离、机动车速度、有无绿灯倒计时作为影响因素,分析倒计时影响下的驾驶决策行为。
2.2 影响因素的量化
根据选取的影响因素,对其进行量化,车型(大为3,中为2,小为1),距停车线距离D(连续变量),绿灯剩余时间及黄灯时间T(连续变量),机动车速度v(连续变量),有无绿灯倒计时G(有为1,无为0)。
为确保自变量的有效引入,需对自变量筛选。通过SPSS显著性分析,在置信度为α=0.05的条件下,所选变量中,除车型以外,其余的Sig.值均<0.05。因此认为,距停车线距离D(连续变量)、绿灯剩余时间+黄灯时间 T(连续变量)、机动车速度v、有无绿灯倒计时G等变量对驾驶人决策有显著影响,引入这些变量进行回归分析。另外,为明确某些变量之间是否具有互动作用,即当与某个自变量一个单位变化相联系的因变量的变化同时还取决于一个或多个其他自变量的值,还需进行互动项的检验,通常只检验在实际中可能性较大的互动项[6]。由于有无倒计时信号交叉口的不同主要表现在信号灯时间是否被驾驶人所知晓,因此,为了解变量 T对有无倒计时信号交叉口影响的差异,选择互动项G×T进行检验,以了解对于有倒计时和无倒计时而言,绿灯剩余时间及黄灯时间对通过机会的影响是否存在不同,其显著性检验结果为影响显著。
2.3 模型参数估计
根据二项Logistic模型可获取如下模型形式:

式中,P为驾驶员决定通过(y=1)交叉口的概率;β0、β1、β2、β3、β4、β5为标定系数;D为距停车线距离(m);T为绿灯剩余时间+黄灯时间(s);v为机动车速度(km/h);G为有无绿灯倒计时(G=1,有绿灯倒计时;G=0,无绿灯倒计时);G×T为G与T的互动作用项,可作为一个新的变量。
利用SPSS对模型进行标定,结果可知,取显著性水平α=0.05,引入模型的所有变量均有显著性(Sig.值均小于0.05)。T(绿灯剩余时间+黄灯时间)和v(机动车速度)的系数(分别为1.819,0.074)为正,表明驾驶人在面对较长的绿灯剩余时间以及较高的速度行驶时更倾向于通过交叉口;相反,车辆距停止线距离D的系数(-0.144)为负,表明驾驶人远离交叉口时更倾向于停止;G(有无绿灯倒计时)的系数(2.195)为正,意味着驾驶人在有绿灯倒计时的交叉口比无绿灯倒计时交叉口更倾向于通过;此外,G×T互动项影响显著,其系数(-0.231)为负,说明对于有无倒计时信号交叉口,绿灯剩余时间及黄灯时间对驾驶人的决策影响程度不同;模型标定常数为-2.057。
根据以上分析,得到有无绿灯倒计时信号交叉口驾驶人决策模型:

根据式(2),驾驶人在有无绿灯倒计时交叉口的决策行为可以用下面两个函数来表示:

对于式(3)和(4),取一个场景为例,一个驾驶员在离停车线40 m处以40 km/h的速度面临着绿灯剩余3s的时间,那么决定通过的概率在有绿灯倒计时和无绿灯倒计时处分别为62.57% 和22.81%,表明绿灯倒计时显示器显著提高了驾驶员决定通过交叉口的概率,从而增加了交叉口效率。
2.4 模型评价和检验
(1)回归方程的整体显著性检验
从表1可知,在确定显著性水平为5%的条件下,由于-2ln(L0/L1)=484.833>χ20.05,表明模型所选择的影响变量对驾驶员决策有着显著的影响。同时,Sig.<0.05说明方程中的回归系数不同时为0,解释变量全体与Logit P之间的线性关系显著,通过似然比检验,采用该模型是合理的。

表1 模型似然比检验Tab.1 Omnibus tests of model coefficients
(2)模型拟合优度检验
1)Cox-Snell R2和Nagelkerke R2检验
一般地,Cox&Snell R Square值>0.2时可接受,>0.4时则好;Nagelkerke R Square值>0.2可接受,>0.4则好,>0.5则非常好[7]。从表2可以看出,对应值均远>0.4,表明模型拟合很好,精度较高。

表2 模型汇总Tab.2 Model summary
2)Hosmer-Lemeshow检验,如表3。

表3 Hosmer-Lemeshow检验Tab.3 Hosmer-Lemeshow tests
若Sig.值小于给定的显著性水平α,则模型拟合效果不好;反之,则模型拟合效果较好。由表3可以看出,在确定显著性水平5%的条件下,该模型拟合较好。
2.5 模型验证
利用首山路—上三路交叉口(有倒计时)、首山路—南台路交叉口(无倒计时)的数据对模型进行验证,样本量采用如下公式计算。

式中,N为样本量;z为对应置信水平的置信度;p为样本变异程度;e为允许误差。
按95%的置信度取z=1.96,e取0.05,p取0.5[8]。计算得N=384,则每个交叉口各读取192辆小型车。现场拍摄视频观测该组交叉口绿灯放行期间最后10 s及黄灯期间的车辆通过停止情况,与模型计算结果进行比较,如表4。

表4 驾驶决策模型验证Tab.4 Driving decicion model verification
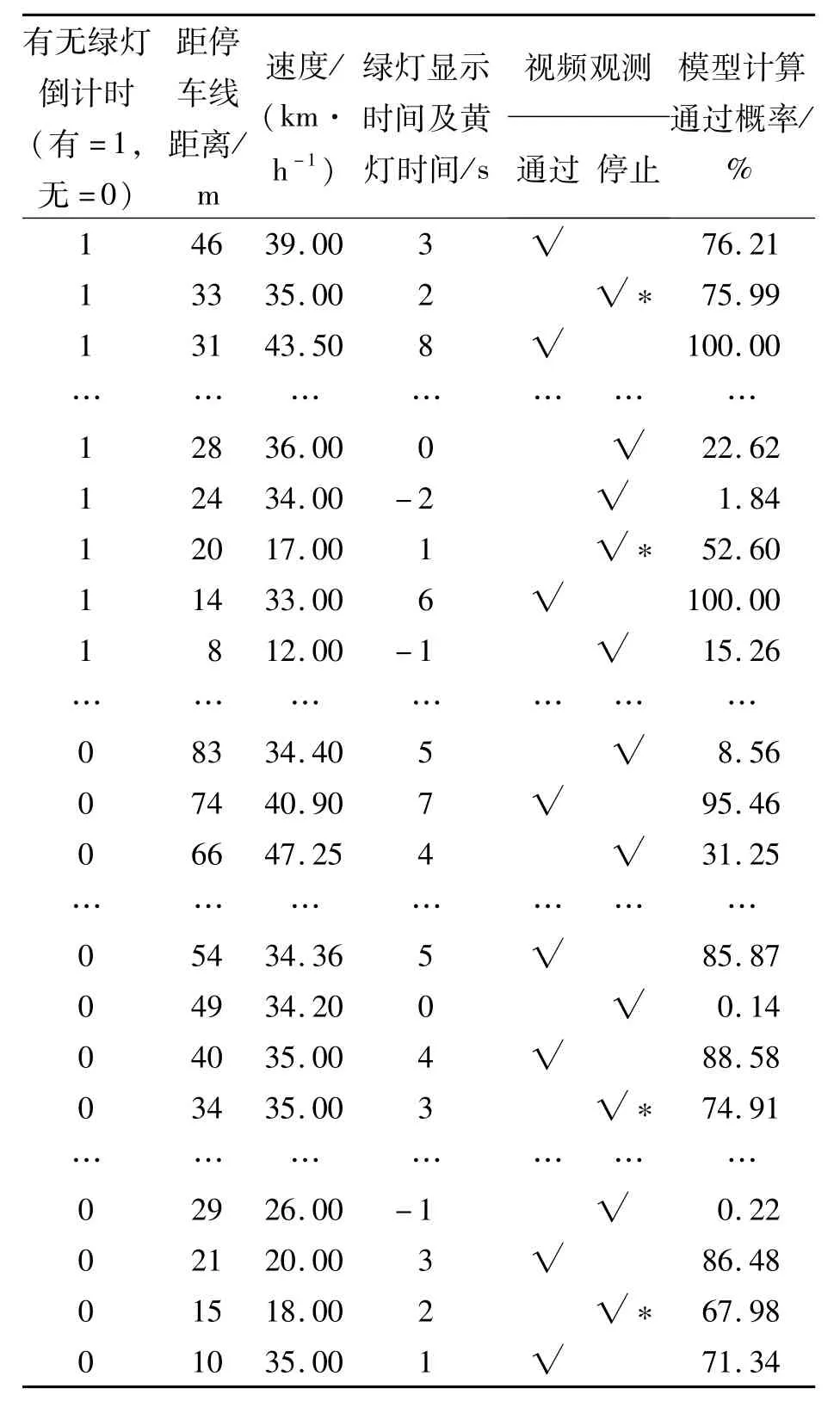
续表
从表4可以看出,以50%为界,当模型计算概率>50%时,则预测为通过。在所选择交叉口随机统计的384辆小车中,有67辆实际为停止,但预测概率超过50%,即正确率为83%,表明模型的预测准确度达到 80%以上,该决策模型可以应用于实际。
2.6 模型应用
(1)模型发生比(odds ratio,OR)

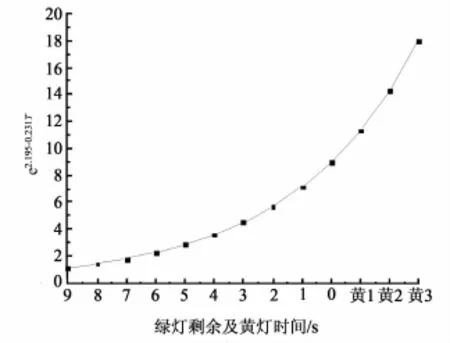
图1 有无倒计时发生比比值曲线Fig.1 With and without countdown odds ratio ratio curve
该曲线表明,在相同位置、相同速度、相同剩余时间的条件下,有绿灯倒计时交叉口的驾驶员选择通过的发生比与无绿灯倒计时交叉口驾驶员选择通过的发生比的比值大于1且呈递增形式,说明绿灯倒计时将导致更多的驾驶员选择通过交叉口。
(2)倒计时最佳显示时长
目前,对于倒计时显示起点并没有一个特别的规定。驾驶人在交叉口处的驾驶决策模型,如式(2)~(4)。由于Logit(P)=ln[P/(1-P)],则驾驶人决定通过的概率为:P(Y=1)=[eLogit(P)/(1+eLogit(P))],代入该模型可得驾驶员在有绿灯倒计时交叉口和无绿灯倒计时交叉口决定通过的概率分别为
有绿灯倒计时(G=1):P(Y=1)=

无绿灯倒计时(G=0):P(Y=1)=令有绿灯倒计时情况下的通过概率不小于无绿灯倒计时情况下的通过概率,简化并计算得,T≤9.50,即绿灯剩余时间10.5 s。

通过计算可知,在绿灯剩余时间大于10.5 s时,绿灯倒计时显示器对驾驶人的决策几乎没影响,也就是说,此时虽然有绿灯倒计时交叉口的通过概率小于无绿灯倒计时交叉口的通过概率,但数值相差不大,几近相等;而在绿灯剩余时间≤10.5 s开始,有绿灯倒计时交叉口的驾驶人通过概率大于无绿灯倒计时交叉口,从而提高了效率。因此,从效率出发,建议城市信号交叉口安装倒计时显示器时,可从绿灯剩余10s开始进行倒计时显示。
对于红灯倒计时显示时间,亦从剩余10s开始进行倒计时显示,这样不仅不会对驾驶员造成混乱,还能降低提前启动闯红灯的可能[9]。
3 结语
1)信号交叉口倒计时显示对驾驶决策有显著影响。选择距停车线距离D、绿灯剩余时间+黄灯时间T、机动车速度v、有无绿灯倒计时G以及互动项G×T作为变量,建立了有无倒计时信号交叉口驾驶决策模型。
2)通过模型发生比分析指出,绿灯倒计时将导致更多的驾驶员选择通过交叉口,从而提高效率。
3)通过对驾驶决策模型分析,基于效率角度,建议城市信号交叉口安装倒计时显示器时,可从剩余10 s开始进行倒计时显示。
[1]中华人民共和国国家质量监督检验检疫总局.GB14889—2006道路交通信号灯设置与安装规范[S].北京:中国标准出版社,2006.
[2]张强.决策理论与方法[M].大连:东北财经大学出版社,2009.
[3]Papaioannou P.Driver behaviour,dilemma zone and safety effects at urban signalized intersections in Greece[J].Accident Analysis and Prevention,2007,39(1):147-158.
[4]Moon Y J,Fred Coleman III.Dynamic dilemma zone based on driver behaviour and car-following model at highway-rail intersections[J].Transportation Research(Part B),2003(4):323-344.
[5]钱红波.交叉口过渡信号设置对驾驶员心理及交通安全的影响研究[D].上海:同济大学,2009.
[6]王济川,郭志刚.Logistic回归模型——方法与应用[M].北京:高等教育出版社,2001.
[7]克劳斯·巴克豪斯,本德·埃里克森,王煦逸,等.多元统计分析方法[M].上海:格致出版社&上海人民出版社,2008.
[8]王卫东.倒计时信号灯交叉口犹豫区研究[D].北京:北京工业大学,2009.
[9]余璇.交叉口信号控制安全的研究[D].上海:同济大学,2008.
(责任编辑:陈雯)
Analysis of the impact of countdown display of signalized intersection on driving decision-making
Wu Juanli
(Civil Engineering Department,Yangguang College,Fuzhou 350015,China)
The impact of countdown display at signalized intersection on driving behaviour was discussed.To quantitize driving behaviour rules,a driving decision-making model of countdown signalized intersection was presented to determine the effect of countdown signalized intersection on the traffic efficiency.The impact of the countdown signalized intersection on the driving decision-making was analysed via the case of Fuzhou typical intersections to provide reference for traffic management departments.
countdown;signalized intersection;driving decision-making;binomial logistic model
U491
A
1672-4348(2015)06-0557-05
2015-07-13
吴娟莉(1987-),女,四川广元人,助教,硕士,研究方向:交通规划、管理与控制。
