基于小波特征融合的Hyperion影像降维方法
2015-12-14孙小芳
孙小芳
(闽江学院 地理科学系,福建 福州350121)
高光谱遥感能提供数十至数百个窄波段的光谱信息,依据地物的诊断性光谱特征进行地物识别。然而,在提供丰富光谱信息的同时,高光谱数据波段间的相关性和冗余性制约着它的应用。研究表明:对大多数地物而言,纳米级的光谱分辨率是不必要的,波段间也不必要连续存在[1]。因此有必要探讨高光谱波段选择方案,进行图像降维,在光谱分辨率与地物识别能力之间寻求最佳的平衡点。利用波段选择进行降维、利用波段特征提取进行降维、利用融合技术进行降维[2-6]。
基于前人的研究,本文提出根据影像中地物光谱曲线的特征点确定地物识别合适的光谱分辨率,通过融合原先若干窄波段生成适合地物识别的宽波段数据,从而达到了降维目的。利用不同地物样本光谱的小波细节系数方差、小波细节系数信息熵作为特征点,探讨了各种地物有效识别的光谱分辨率,按照这个有效识别的光谱分辨率来确定降维后宽波段的光谱范围及波段个数,以窄波段间的活跃度为指标进行融合生成降维后的宽波段,最后以福州南通地区hyperion影像为例进行地物的识别[7-9]。
1 Hyperion数据预处理
1.1 数据概况
EO-1是美国NASA研制的新型地球观测卫星,其上搭载的Hyperion成像光谱仪是第一个星载民用成像光谱仪,空间分辨率为30m,光谱分辨率为10nm[10]。本文采用的数据获取时间为2003-03-26,L1R数据产品的生成时间为2009-07-07。由于L1R已排除了VNIR和SWIR间的空间错位问题,是Hyperion数据使用的主要格式。所选的福州南通影像包括:耕地、园地、林地、河流、道路、居民区等地物,能够集中体现各类地物的交错分布。为了保证样本选择的准确性,研究中还采用2004年南通地区土地利用现状图、2003年南通地区IKONOS卫星影像。
1.2 Hyperion数据预处理
当Hyperion探测器工作不正常或定标精度存在问题,导致波段的图像某列数据缺少光谱信息,图像上呈现一条黑线即坏线[11]。读入图像进行逐波段检查,记录有坏线存在的波段和对应的列号,经检测所采用的LIR数据坏线列号:1,6,22,91,92,94,112,114,137,147,199,239,255,选 用 出现坏线的相邻列的平均值替换坏线部分进行修复。
Smile效应指在垂直飞行方向上,像元的波长从中心位置向两边偏移,NVIR的偏移量为2.6~3.6nm,SWIR波段的偏移量为0.4~0.97nm,偏移量大于1nm时会影响像元光谱,因此要对NVIR波段进行纠正。Smile效应的纠正方法包括移动线性法、MNF列均值调整、交叉轨道照度校正方法。本文采用交叉轨道照度校正方法完成了Smile效应的纠正。
大气校正是为了消除大气和光照等因素对地物反射的影响,获取地物的真实反射率或反射值。在大气校正前,先要完成光谱辐射量计算,才能满足FLAASH大气校正模块的输入条件。FLAASH是基于MODTRAN4辐射传输模型的大气校正模块,运用该模块可以还原地物的真实反射率。Hyperion的LlR产品一共242个波段,其中只有198个波段做了定标处理,其他波段的值赋为0。经过FLAASH大气校正后,再去除噪声严重,数据质量差的波段,最终用于研究的有155个波段:8~57,79,83~119,133~164,183,184,188~220。
2 小波特征图像降维的原理及实现
2.1 基本原理
2.1.1 小波特征
研究所用的155个波段的Hyperion数据光谱分辨率为10nm,每层离散小波分解后,所得到的近似小波系数、细节小波系数出现减半现象,最多进行7次DB4小波分解。1~7次小波分解,各层所对应的光谱分辨率分别为20nm,40nm,80nm,160nm,320nm,640nm,1 280nm。小波细节系数表示光谱反射值变化较快和局部特征部分。小波方差仅为尺度函数,与位置无关,通过小波方差的峰值可以直观的识别光谱特征尺度。小波信息熵为多尺度分解空间中各个子空间所包含的信息量。计算小波细节系数方差、小波细节系数信息熵,说明光谱特征尺度。
设W(a,b)为信号f(n)在尺度a,位置b上的小波变换系数,则可定义尺度a上的小波尺度方差与信息熵分别为

式中:Pi(i=1,2,…,M)是某尺度a上小波变换系数的近似概率分布,M为小波系数的区间数目。
2.1.2 波段融合降维
根据地物可识别的光谱分辨率转折点来确定宽波段的区间范围,将原先所对应的各高光谱波段进行小波融合,生成仿真的一个宽波段影像。同理,最后将原始的155个高光谱波段,根据不同地物的可识别光谱分辨率降维融合生成几个仿真的宽波段。在进行融合图像生成时,融合图像的低频和高频小波系数由各原始波段的活跃度来决定。
活跃度:

式中:K为波段数;f为DN 值;M,N为图像大小。
2.2 方法实现
2.2.1 地物特征光谱分辨率
结合2004年南通地区土地利用现状图、2003年IKONOS影像图,进行目视判别,选择图像中八类地物,分别是不可渗透表面、居民地、密林、其他林地、水浇地、水体、水田、裸土。通过对八类地物选取样区,得到每种地物类别的平均光谱曲线。对平均光谱曲线利用DB4小波进行分解,分别计算各分解尺度下各类地物的小波细节系数方差、小波细节系数信息熵,结果如图1所示。

图1 DB4小波细节系数方差与信息熵
图1(a)小波细节系数方差在1~3尺度中,尽管随着小波降维,光谱分辨率增大,但各地物内部的光谱细节变化程度不大,光谱曲线在1~3尺度中的细节表现能力并没有多少下降。但在3尺度后,各层光谱曲线的细节值与原始光谱曲线相比,发生较大的变化,造成光谱方差变大。在1~3尺度内,相邻连续光谱曲线值变化并不会很大,曲线是光滑渐变的,但随着尺度加大到3尺度以后,光谱分辨率增大,相邻渐变值被激变值取代,表现为方差变大。3尺度是基本的分解尺度了可以满足八类地物的分类,即可以做为区分八类地物的基本分解尺度。
图1(b)小波细节系数信息熵,明显看到两类拐点,第一类拐点出现在3尺度,所对应的地物在图像中所占的比例较小且分散,即不可渗透表面、居民地、水田、裸土。第二类拐点出现在4尺度,所对应的地物在图像中所占的比例较大且集中,即密林、其他林地、水浇地、水体。出现这种情况,一方面与样本选择的因素有关,由于地物小且分散,样本纯度受到影响。另一方面地物比较小,但由于空间分辨率不高,样本光谱中存在着混合像元情况,需要较高的光谱分辨率来提高小比例地物的识别。所以在以3尺度为地物基本识别的尺度基础上,进一步考虑地物实际的面积大小及分布情况,确定了不可渗透表面、居民地、水田、裸土4类地物的识别尺度为3尺度,即光谱分辨率为80nm,密林、其他林地、水浇地、水体4类地物的识别尺度为4尺度,即光谱分辨率为160nm。
2.2.2 融合降维
利用样本平均光谱的小波细节系数方差和小波细节系数信息熵确定了两大类地物的识别基本尺度分别为3尺度和4尺度。确定融合后影像的波段光谱范围和波段数,如表1所示。表1中可以得出融合后的四尺度影像共有11个波段数且光谱分辨率为160nm,融合后的3尺度影像共有21个波段数且光谱分辨率为80nm,较原先155个波段数大为降低数据量。

表1 三尺度和四尺度波段融合区间
以植被为例,分别绘制出155波段、三尺度融合结果21波段、四尺度融合结果11波段的光谱曲线,如图2所示。图2中两个尺度融合图像的光谱曲线保持原曲线的走势特征,具有原光谱曲线的峰谷特性,具有植被的红边特性,可用于植被识别的样本光谱。由于四尺度融合比三尺度融合包含了更大范围的波段区间,所以出现了植被红边向长波方向移动。说明融合降维方法即可以减少数据量,同时也保证了地物光谱主要的特征,可以满足地物分类的需求。

图2 三种光谱分辨率的植被光谱曲线
3 地物识别
对八类地物:不可渗透表面、居民地、密林、其他林地、水浇地、水体、水田、裸土选取样区,对比hyperion影像、IKONOS影像、土地利用现状图,目视解译判读八类地物。不可渗透表面是指公路用地、交通用地、桥梁、广场、各种人工建设不可渗透表面。图中的居民区为乡镇、村庄民房,在水系边上或位于山脚下,分布较为零散且面积不大,纹理信息不丰富不明显。密林指大面积山体林地,远离居民区,有成林。其他林地包括:疏林地、有林地、其他园地、果园,靠近人们居住地,林木较少,如草地、灌木、果树、苗圃,在水系边上,方便浇灌,但较植被覆盖较稀少。水浇地包括菜地、旱地,面积较小,不规则分布,多在水田缝系中或处于居民地边上。水体包括河流水面、养殖水面、坑塘水面。水田面积较大且有规则,多分布于河流或坑塘边上。三月底水田已经翻晒,放水泡田,水浅有反光。裸土包括土路、滩涂。对所选出的八类地物样区光谱计算JM距离,样区两两之间的距离计算结果均大于1.9的值,说明所选的感兴趣区之间分离性较好,可以做为光谱分类的样本。利用光谱角度填图进行分类,分类结果如图3所示。利用混淆矩阵方法,结合矢量图以及IKONOS影像目视解译进行分类精度评定,结果如表2所示。
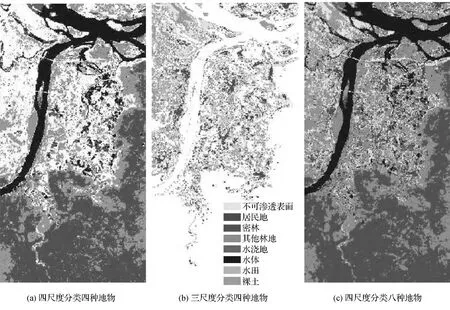
图3 四尺度和三尺度分类结果

表2 地物分类精度
4 结果与讨论
图3(a)为四尺度即光谱分辨率为160nm时,对基本可识别的四类地物:密林、其他林地、水浇地、水体的分类。图3(b)为三尺度即光谱分辨率为80nm时,对基本可识别的四类地物:不可渗透表面、居民地、水田、裸土的分类,图3(c)为三尺度下对八类地物的分类结果,利用混淆矩阵进行检测,在尺度3下识别的地物精度略小于在尺度4下识别的地物精度,但全部地物的识别精度均大于70%,而且由于降维,数据量减少,提高了分类速度。从分类结果中可以看出,四尺度下基本可识别的地物面积较大且较为集中,三尺度下基本可识别的地物面积较小且分布较为分散,这个结果与小波特征的两个参数计算所得到的结论相一致,结果说明降维影像能满足应用需要。
通过以hyperion影像的地物识别为例,说明高光谱影像的降维工作可以从数据应用的适用性出发,根据不同地物的适宜识别光谱分辨率来判定数据降维的程度,使得数据降维满足生产应用。本文提出的方法适用于光谱分辨率在十几纳米左右的机载及地面高光谱成像数据,可以根据图像中具体的研究对象确定合适的对象识别光谱分辨率,进行保证地物光谱重要特征点的存在,同时减少数据量。在本研究中,由于影像空间分辨率不高且某些地物较破碎,所以直接利用影像中的光谱样本,会因为混合像元的存在造成样本光谱的偏差,在后继研究中需要进一步提高样本光谱的纯度,也可以采用野外样本光谱采集,或者利用目前存在的各种光谱数据库。
[1]李显彬,姜小光,刘亮,等.基于光谱重建的高光谱特征参数选择方法—以苏北地区Hyperion数据为例[J].遥感学报,2007,11(4):589-594.
[2]高燕,苏奋振,周成虎,等.面向对象的遥感影像时空特征模型研究[J].测绘工程,2013,22(5):29-33.
[3]郭雷,常威威,付朝阳.高光谱图像融合最佳波段选择方法[J].宇航学报,2011,32(2):374-379.
[4]臧卓,林辉,杨敏华.利用PCA算法进行乔木树种高光谱数据降维与分类[J].测绘科学,2014,39(2):146-149.
[5]陈刚,陈小梅,李婷,等.基于小波分解的光谱特征提取算法研究[J].光谱学与光谱分析,2010,30(11):3027-3030.
[6]SONG S,GONG W,ZHU B,et al.Wavelength selection and spectral discrimination for paddy rice,with laboratory measurements of hyperspectral leaf reflectance[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(6):672-682.
[7]ROSHAN PANDE-CHHETRI,AMR ABD-ELRAHMAN.De-striping hyperspectral imagery using wavelet transform and adaptive frequency domain filtering[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(6):620-636.
[8]龚建周,陈健飞,刘彦随.E0-1Hyperion高光谱影像的FLAASH大气校正与评价[J].广州大学学报:自然科学版,2011,10(5):69-75.
[9]周清,祝民强.EO-1Hyperion高光谱数据FLAASH模块大气纠正及评价[J].测绘与空间地理信息,2011,34(6):149-151.
[10]高艳妮,陈玮,何兴元,等.基于二维小波分析的景观特征尺度识别[J].应用生态学报,2010,21(6):1523-1529.
[11]朱蕊,邱茂,胡英男.面向空间数据更新的多源数据融合关键技术研究[J].测绘工程,2013,22(4):22-25.
