基于ADAMS的扭矩合成装置动力学仿真分析
2015-12-14刘志凯杨瑞峰郭晨霞张新华
刘志凯,杨瑞峰,郭晨霞,张 鹏,张新华
(1.中北大学仪器与电子学院,山西 太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051;3.北京自动化控制设备研究所,北京 100000)
基于ADAMS的扭矩合成装置动力学仿真分析
刘志凯1,2,杨瑞峰1,2,郭晨霞1,2,张鹏1,2,张新华3
(1.中北大学仪器与电子学院,山西 太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051;3.北京自动化控制设备研究所,北京 100000)
针对电动负载模拟器中采用的一种扭矩合成装置,分析其在不同输入条件下扭矩的合成效率。利用Solidworks软件建立三维模型,通过Parasolid格式将模型转入到ADAMS中,以Hertz弹性碰撞理论为基础,对齿轮之间的接触力进行计算并施加约束,最终建立扭矩合成装置的动力学模型,通过输入不同大小、方向、频率、相位等各种形式的扭矩,得到输出扭矩的动态响应特性曲线。仿真结果表明:仿真值与理论值误差在1%之内,证明该扭矩合成装置在各种不同输入条件下都能高效地实现扭矩合成的目的,所建模型是可靠、准确的。研究结果对装置的使用以及进一步的结构优化设计具有一定的指导意义。
电动负载模拟器;扭矩合成装置;ADAMS;接触力;动力学仿真
0 引 言
电动负载模拟器是飞行器舵机在半实物仿真测试中的关键设备,电动负载模拟器采用电机作为系统的动力源输出部件,具有体积小、易维护、噪声小等特点[1-2]。随着飞行器舵机性能的越来越高,小扭矩电机基本无法满足电动负载模拟器的需要,通常是通过更换更大扭矩的电机来提供所需的动力,这往往会极大地增加试验成本,因此使用一种扭矩合成装置对数个小扭矩电机进行输出扭矩的合成,将很大程度增大已有电机的应用范围,进而降低试验成本。本文分析的扭矩合成装置不仅能实现单输入单输出,而且能够将两个输入轴上的输入扭矩合成并输出到输出轴上[3]。该扭矩合成装置的核心部分是一套行星齿轮传动机构,行星齿轮机构结构复杂,而且由于各齿轮制造误差和安装误差的影响,导致行星轮间载荷分配不均匀,会使机构的性能受到一定影响[4]。对于扭矩合成装置来说最重要的是输出扭矩的大小和准确度,因此,分析在各种输入条件下,输出扭矩与输入扭矩之间的关系,对于该扭矩合成装置在电动负载模拟器中的应用具有重要意义。
1 扭矩合成装置简介
扭矩合成装置的结构简图如图1所示。锥齿轮1、2、3、4为相同参数的齿轮,锥齿轮5、6为相同参数的齿轮,T1、T2为输入扭矩,T3为输出扭矩。由于齿轮3和4既有自转也有公转,因此齿轮3、4为行星齿轮,齿轮5、6组成定轴轮系,齿轮1、2、3和系杆H组成差动轮系。工作原理为:当T1和T2为相同的扭矩时,此时行星齿轮3、4只是绕输入轴1、2的轴线公转而没有自转,相当于等臂杠杆,因此,传递到齿轮5上的扭矩为T1、T2之和,而齿轮5、6的传动比为1,所以最终传递到输出轴上的扭矩为两输入扭矩之和,即T3=T1+T2。当T1和T2不相同时,必然会导致齿轮1和齿轮2的转速不同,齿轮3、4会绕齿轮轴自转,此时行星齿轮孔与行星齿轮轴径间以及齿轮背部与装置壳之间都会产生摩擦。行星齿轮所受的摩擦力矩f的方向与行星齿轮的转向相反,此摩擦力f分别对齿轮1、2附加了大小相等方向相反的两个摩擦力矩Tf,假设T1>T2,则作用在齿轮5上的力矩分别为T1-Tf和T2+Tf,因此输出轴上的转矩T3=(T1-Tf)+(T2+Tf),即T3=T1+T2。由此可见,该扭矩合成装置能线性地将随机变化的输入扭矩合成输出。

图1 结构简图
2 三维建模
本文所研究的扭矩合成装置针对的齿轮为渐开线锥齿轮,由于ADAMS在建模方面比较薄弱,尤其是在建立锥齿轮模型时,不能准确、形象地建立其模型,因此,本文将使用三维建模软件Solidworks来绘制各个齿轮和输入输出轴的零件图并进行装配[5]。装配完成后对装配体进行干涉检查,确保齿轮能完美啮合,排除其他机械干涉对后续仿真的影响。装配体各个齿轮的主要参数如表1所示。
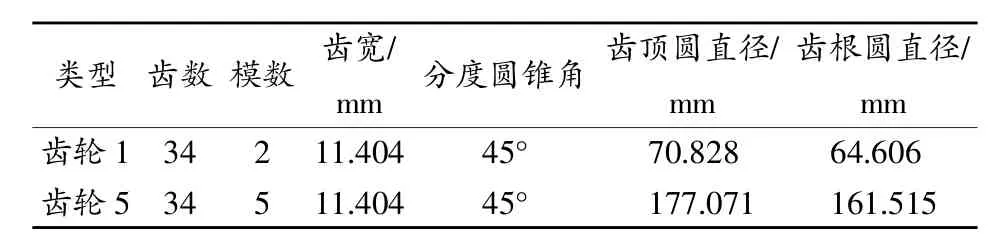
表1 扭矩合成装置各齿轮参数
Parasolid可以将整个装配体模型转换到ADAMS中,并且ADAMS能识别装配体中的各个零件[6]。因此,本文将通过Parasolid格式来对装配体模型进行数据转换。
3 建立动力学仿真模型
3.1施加约束和载荷
在ADAMS中,通过在构件间施加约束来定义构建的连接方式和相对运动形式,通过施加载荷来驱动模型运动[7]。
1)对齿轮1与输入轴1,齿轮2与输入轴2,齿轮6与输出轴分别添加布尔运算,将它们合并为一整体。
2)齿轮1、2、3、4分别施加相对于齿轮5的旋转副,齿轮5、6施加相对于地面的旋转副。
3)由于各个齿轮在啮合时都存在接触,因此在各个齿轮彼此啮合的地方施加接触副。关于接触系数的选取,力指数e取1.5,阻尼系数取60N·s/mm,穿透系数取0.1mm。
4)为测量输出扭矩的大小,在输出轴3上添加一个扭转弹簧阻尼器,并设置将测量到的扭矩显示在输出轴上。
5)在输入轴1和输入轴2上分别施加不同大小、方向、频率、相位等形式扭矩,以模拟实际的工作状况。
3.2碰撞接触刚度系数的确定
在齿轮啮合的过程中,由轮齿碰撞而产生的力称为接触力,接触力可以分为两部分:1)由于两个齿轮之间的相互啮合而产生的弹性力;2)由于两个齿轮的相对运动而产生的阻尼力。在ADAMS中计算接触力的方法有补偿法(Restitution)和冲击函数法(IMPACT)2种,Restitution是用恢复系数来计算接触力的,IMPACT是用刚度系数和阻尼系数来计算的[8]。相对于Restitution算法,IMPACT算法参数容易设定一些,因此将采用冲击函数法对其接触力进行计算。Impact函数的表达式为

式中:x——两个啮合的齿轮接触时的实际距离;
x1——两个物体要接触的参考距离;
k——刚度系数;
e——刚性力指数;
C——阻尼率;
d——阻尼率达到最大时所要经过的距离,用
来防止碰撞过程中阻尼条件不连续。
轮齿碰撞时产生单位接触变形引起的力,可以看成是两个变曲率半径柱体碰撞的问题。根据Hertz碰撞理论,当两个齿轮的轮齿接触时,可以假设两个圆柱体发生接触碰撞,于是得到了变形量δ的表达式为
进而得到在碰撞时法向接触力p和变形量δ的关系为

根据本论文中所选齿轮的材料,通过查表可得齿轮的泊松比为0.29,弹性模量为2.07×1011Pa,根据表1中齿轮的参数,计算出齿轮1、2、3、4的相对曲率半径r=17mm,齿轮5和齿轮6的曲率半径为34mm,最终得到齿轮1和齿轮3的接触刚度系数为2.56×齿轮5和齿轮6的碰撞接触刚度系数为
4 不同工作状况下的动力学仿真分析
本文以输入端1朝向输入端2的视角,顺时针方向的扭矩定义为正,逆时针方向的扭矩定义为负。
1)在多动力驱动系统中,常常会遇到这样一种情况,即先给一个输入端施加一个扭矩,一定时间以后,再给另一输入端施加一个扭矩,达到增大输出扭矩的目的。因此本文首先对这种情况进行模拟仿真分析,输入端1施加一个1000N·m的扭矩,输入端2输入函数为{step(time,0,0,0.2,0)+step(time,0.2,0,1,2 000)}的扭矩,得到的输入、输出扭矩曲线图如图2所示。由图可知,在前0.2s,输入端1输入的扭矩为1 000 N·m,输入端2输入的扭矩为0 N·m,此时,输出扭矩为1 009 N·m,从0.2 s开始,输入端2开始输入扭矩,在1s时,输入端2的输入扭矩达到最大值2 000 N·m,测得输出端的扭矩达到最大值3 002N·m,与理论值3000N·m的误差为0.06%,误差较小,说明在差速输入的情况下,扭矩能得到高效合成,也说明该模型建立的正确性和准确性。

图2 差速下的输入输出扭矩曲线图
2)在实际的工程应用中,输入的扭矩往往是非静态的,因此本文将对动态的扭矩合成进行仿真分析,首先输入相同频率、不同大小的扭矩,如输入端1段输入1 000·sin(10·time)N·m的扭矩,输入端2输入2000·sin(10·time)N·m的扭矩,得到的输入、输出扭矩曲线图如图3所示。由图可知,在0.157s处,输出扭矩的最大值为3030N·m,与输入扭矩的最大值之和3000N·m很接近,此外,在齿轮转动换向时,发现输出扭矩都会发生一个突变,这与实际情况由于轮齿的碰撞造成扭矩突变是相吻合的。

图3 同频率、同方向、不同大小的输入输出扭矩曲线图
其次输入相同频率、不同大小、不同相位的扭矩,如输入端1输入1000·sin(10·time)N·m的扭矩,输入端2输入2000·sin(10·time-10)N·m的扭矩,得到的输入、输出扭矩曲线如图4所示。由图可知,输出曲线也是正弦曲线,在每时每刻,输出扭矩的值都与输入扭矩之和近似相等,起到了扭矩合成的效果。但是由于输入端1的输入扭矩比输入端2的输入扭矩相位超前,因此输出扭矩的最大值仅仅为1400N·m,无法达到3000N·m,这与理论也是相同的。

图4 同频率、不同大小、不同相位的输入输出扭矩曲线图
最后输入不同频率、不同大小、不同相位的扭矩来观察输出扭矩的情况,如A段输入1000·sin(10· time)N·m的扭矩,B端输入2000·sin(5·time-10)N·m的扭矩,得到的输入、输出扭矩曲线如图5所示。由图可知,由于输入扭矩的频率不同,使得输出扭矩的曲线虽然也是周期函数但不是正弦曲线,在此情况下,输出扭矩还是近似地为两输入扭矩的矢量合。在0.46s处,输出扭矩达到最大值为3024N·m,两输入扭矩之和为2 995 N·m,误差为0.958%,此时,输出扭矩与输入扭矩之和的差距比较大,这是因为输入扭矩的相位和频率不同,导致齿轮在啮合的过程中碰撞力比较大,但误差还在合理范围之内。由此可见,不论输入端的扭矩如何变化,该机构总能将输入扭矩高效地合成并输出到输出端。

图5 不同频率、不同大小、不同相位的输入输出扭矩曲线图
5 结束语
本文运用Solidworks和ADAMS建立了扭矩合成装置核心机构的动力学仿真模型,根据Hertz碰撞理论,分析和确定了IMPACT函数中各个参数的取值,通过仿真分析各种输入条件下,输出扭矩和输入扭矩的关系,证明该扭矩合成装置在合成扭矩方面的高效性,也说明所建模型的正确性,经该装置的使用提供了一定的指导作用,为进一步分析研究该装置的动力学特性和结构优化设计奠定了基础。
[1]任志婷,焦宗夏.小转矩电动式负载模拟器的设计[J].北京航空航天大学学报,2003,29(1):91-94.
[2]闵荣,王永军,等.电动舵机快速设计研究[J].航空制造技术,2011(7):72-76.
[3]吴速,王一冰,由长林.一种双机械动力扭矩合成装置:中国,CN201220390779[P].2013-01-23.
[4]石万凯,刘敬,龚建春.同轴对转行星齿轮传动系统动态特性分析[J].振动与冲击,2014(33):99-104.
[5]吴明.自适应机械锁式防滑差速器的仿真与研究[D].长沙:湖南大学,2014.
[6]俞飞鹏,贾鸿社.ADAMS与UG、Solidorks的数据交换实践[J].现代制造工程,2005(10):42-44.
[7]郭会珍,谭长均,陈俊峰.基于adams的行星轮系动力学仿真[J].机械传动,2013(37):86-89.
[8]乔福瑞.基于ANSYS的齿轮接触应力与啮合刚度研究[D].大连:大连理工大学,2013.
Dynamic simulation analysis of torque synthesizer device based on ADAMS
LIU Zhikai1,2,YANG Ruifeng1,2,GUO Chenxia1,2,ZHANG Peng1,2,ZHANG Xinhua3
(1.School of Instrument and Electronics,North University of China,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measurement,Ministry of Education,North University of China,Taiyuan 030051,China;3.Beijing Automation Control Equipment Research Institute,Beijing 100000,China)
A torque synthesizer was used in an electric load simulator to analyze its synthesis efficiency under different input conditions.A 3D model was established with Solidworks and transferred from Parasolid into ADAMS.Then,the contact force between gears was calculated and constraints were imposed to set up a dynamic model for torque synthesizer based on the Hertz elastic collision theory.The torque of different sizes,orientation,frequency,phases and forms were input to get the dynamic response curve of output torque.Simulation results show that the deviation between simulation value and theoretical value is within 1%,which has proved that the torque synthesizer is efficient in all input conditions and the model established is reliable and accurate.The study results are conducive for the use and further structural optimization of torque synthesizers.
electric load simulator;torque synthesizing means;ADAMS;contact force;dynamic simulation
A
1674-5124(2015)12-0087-04
10.11857/j.issn.1674-5124.2015.12.022
2015-06-12;
2015-07-31
国家自然科学基金项目(51375462);国家国际科技合作项目(2014DFR70650)
刘志凯(1989-),男,山西忻州市人,硕士研究生,专业方向为机械设计与仿真分析。
杨瑞峰(1969-),男,山西忻州市人,教授,博士生导师,研究方向为自动化测试与控制技术。
