基于北斗定位系统的双模模块测试方法研究
2015-12-10赵成志许朋陈奂昊
赵成志,许朋,陈奂昊
(工业和信息化部电子第五研究所,广东 广州 510610)
0 引言
2012年10月25日,随着第16颗北斗卫星的成功发射,中国北斗导航工程区域组网的顺利完成,标志着国内的北斗定位系统日渐成熟与稳定。国家在 “十二五”规划中,正式将北斗定位系统向民用开放,鼓励国内各大厂商研发北斗定位芯片及模块[1],同时由各部门积极推广使用北斗定位系统,因而,未来北斗定位系统的使用将会进入快速增长的阶段,届时也将会出现由各个厂商所制造的各种北斗定位模块/产品。如何鉴别定位模块的定位能力,将是接下来几年内的研究重点。由于国家政策的支持,政府部门将采购大批量的北斗定位模块/产品,用于渔业船舶管理、运输车辆管理、公务用车管理和森林防火等,这些应用对定位模块的需求量估计会达到上千万[2],如此大的市场必将会是各大北斗定位模块/产品供应商争夺的焦点。但是,从国家管理部门的角度出发,如何获得合适的产品,如何甄选出最优的产品才是关键,这将会影响到市场的导向,所以,对北斗定位模块/产品的定位能力进行测试,将具有重大的意义。基于此,本文研究了定位模块的测试指标及测试方法,并在此基础上进行改进,提出了多款定位模块同时进行比选测试的测试模型。
1 定位模块测试模型分析
1.1 卫星定位系统的定位原理
卫星定位系统的定位原理是:定位模块/芯片通过搜索卫星,计算模块与卫星之间的距离和方向,即有向距离,可以用向量来表示;当定位模块接收到多颗卫星的数据时,就可以计算出当前的位置,即数学向量学中的两条直线相交时,其交点是确定的,当然不能简单地使用两颗卫星,一般需要4颗及以上的卫星才能完成定位[3]。如图1所示,假设t时刻在地面待测点上安置北斗卫星定位系统接收机,可以测定北斗卫星定位系统信号到达接收机的时间△t,再加上接收机所接收到的卫星星历等其他数据就可以确定以下4个方程式。
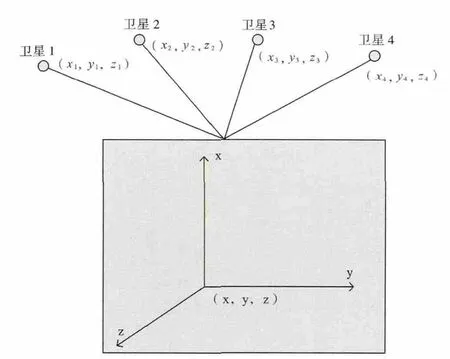
图1 卫星定位系统的定位
在上述4个方程式中,待测点坐标x、 y、 z和Vto为未知参数。其中,di=c△ti(i=1、2、3、4);di(i=1、2、3、4)分别为卫星1-4与接收机之间的距离;△ti(i=1、2、3、4)分别为卫星1-4的信号到达接收机所经历的时间;c为GPS信号的传播速度 (即光速)。另外,各个参数意义如下:x、y、z为待测点坐标的空间直角坐标;xi、yi、zi(i=1、2、3、4) 分别为卫星1-4在t时刻的空间直角坐标,可由卫星导航电文求得;Vti(i=1、2、3、4) 分别为卫星1-4的钟差,由卫星星历提供;Vto为接收机的钟差。由以上4个方程即可解算出待测点的坐标x、y、z和接收机的钟差Vto。
1.2 定位模块的实际道路测试模型分析
根据以上的定位原理,我们来设计实际道路的测试模型。首先,定位模块至少有两个:一个定位模块作为被测模块,一个定位模块作为标准数据进行比较,我们称为标准模块;两个定位模块在同一地点、同一时刻接收相同的卫星定位信号。然后,根据定位模块自己的定位算法,计算出定位信息,即经度、纬度和高度。通过比较两个定位信息的差来鉴定被测模块的定位能力。因此,作为标准的定位模块的定位能力必须要比其他定位模块的定位能力强,不然不足以作为标准模块[4]。在我们的测试模型中,选择高精度的RTK惯导组合,这里不再赘述惯导和RTK的原理,一般要根据实际的需要来确定选用何种组合作为标准模块,高精度RTK惯导组合是目前业界定位精度最高的设备,是在GPS定位信息的基础上,结合RTK差分信号和惯导信息,对定位信息进行修正,得到一个更高精度的组合定位信息,因而能使定位模块的定位精度得到很大的提高。
由于在整个定位过程中需要比较计算很多组数据,所以在数据比较端我们需要通过软件来进行计算。但是,计算过程却比较简单,就是先计算出被测模块的单点定位信息与标准信息的差值,即误差,然后再计算出多组误差的算术平均值即可。
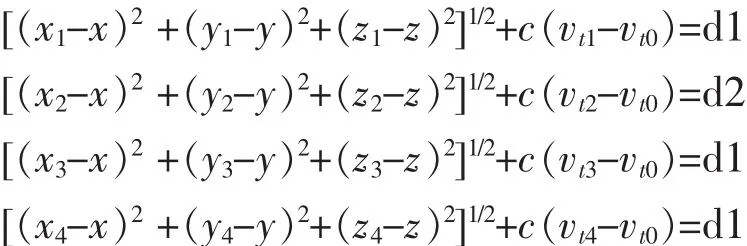
因此,本次实际道路测试的模型如图2所示,该模型的具体的工作过程如下所述。
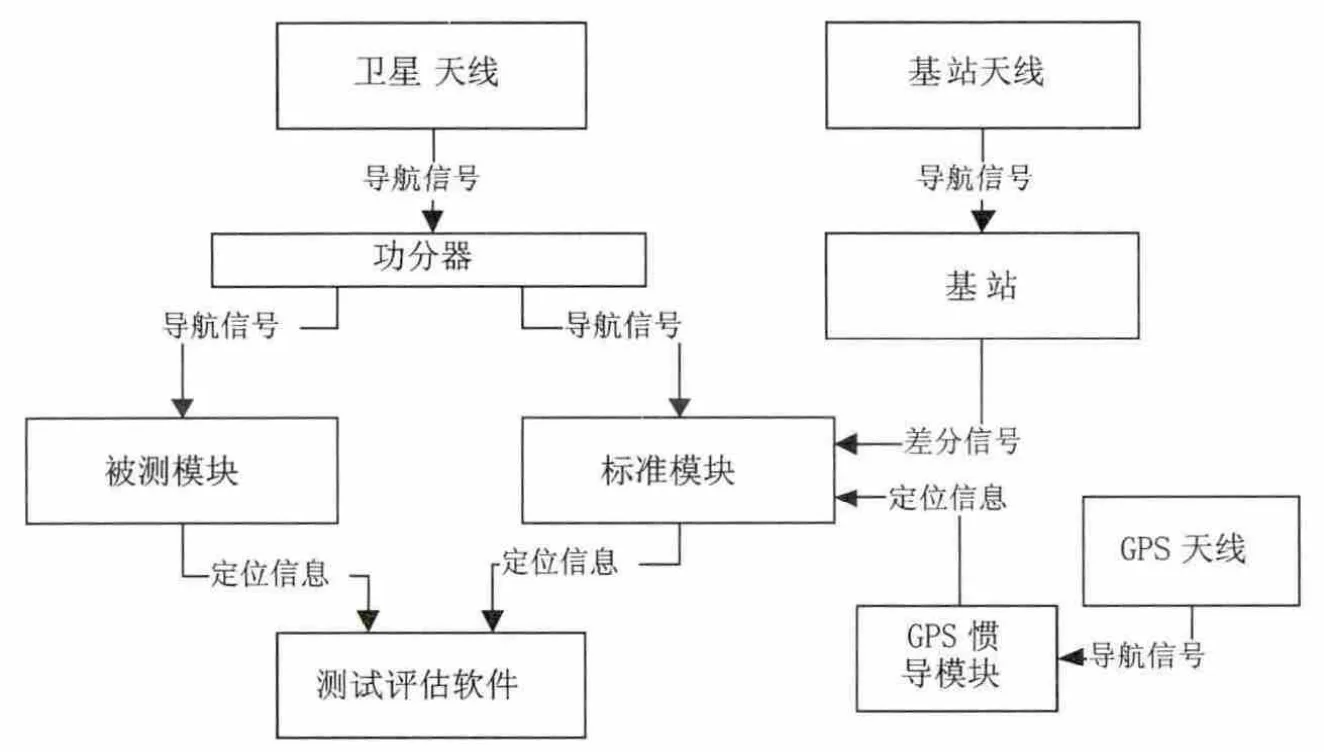
图2 定位模块的实际道路测试模型
首先,通过卫星天线,将导航信号传输到功分器;功分器将导航信号复制成两份相同的导航信号分别给被测模块和标准模块,被测模块根据导航信号计算出定位信息,并将该信息发给评估软件;标准模块则使用GPS模块进行定位计算。然后,再结合RTK的差分信号和惯导的定位信息进行组合定位。最后,将组合定位信息发给评估软件,由于实际道路的测试过程是一个连续的动态过程,一般一个场景的测试将持续20 min,将会有1000多组定位数据,所以在测试过程中需要设定同步信号,它由评估软件统一发出,即在开始进行定位时,由评估软件统一 “开始”接收定位数据,并在开始的同时插入一个同步信号标识。
1.3 实际道路测试环境的搭建
车载测试环境分为两部分:一部分为被测件组,另一部分为对照组;被测件组与对照组同用一个导航信号源,即来自车顶架设的多模卫星接收天线所接收的北斗卫星信号。辅助设备有:可支持4 h以上的移动交流电源,可提供稳定的交直流变压直流电源、车载录像机和车载设备机架。实际道路测试环境的连接方式如图3所示,具体的操作步骤如下所述。
a)第1步,准备测试用车,测试车辆的车厢空间应足够大,以便放置测试设备。
b)第2步,安装对照组设备。
1)安装计速器,使用精确的里程计,将计速磁条安装到汽车其中一个后轮的内鼓中,并安装感应头,将感应数据传至惯导仪;
2)安装卫星接收天线,在测试车顶部的中轴线附近分别安装两个卫星接收天线,一前一后,与车辆前进方向同向,分别为前卫星天线和后卫星天线,前卫星天线为GPS接收天线,后卫星天线为多模接收天线;
3)安装惯导仪,将惯导仪安装于车厢内部,位置介于前卫星天线和后卫星天线投影连线的中间,并置于车厢地板固定,接入前卫星导航信号 (GPS);
4) 安装导航计算机 (PCS),将PCS固定于车厢地板上,并接入里程计、前卫星天线和惯导仪等设备的数据信号;
5)安装电台接收器,将接收天线置于车厢外顶部,将信号线接入车厢内的电台接收器,电台接收器将接收到的基站差分信号放大和解调后再输入PCS中;
6)接入后卫星天线的导航信号,多模卫星天线用于接收北斗卫星导航信号,在经过功分器后,与被测件组共用同一种导航信号;
7)安装PCS控制端,PCS控制端为一个便携式计算机,安装有导航信息综合显示软件,控制端与PCS间由网线连接。
c)第3步,安装被测件组设备,被测件组分为3个部分:前置信号收集设备、被测芯片信息处理系统和测试评估系统。
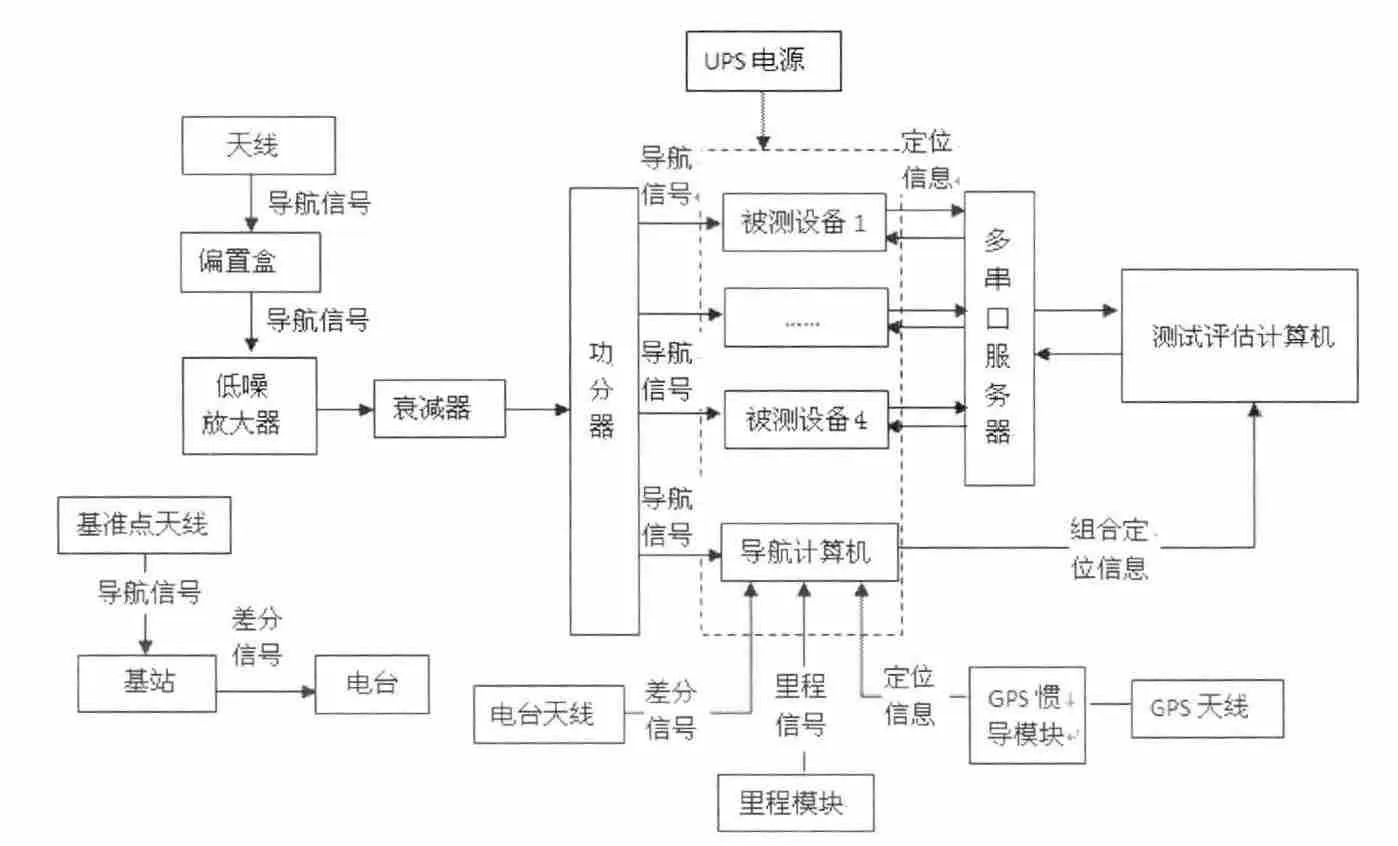
图3 实际道路测试环境连接图
1)安装前置信号收集设备,卫星导航信号源从后卫星天线引入,经过偏置盒 (又称为加电盒或北斗低噪声放大器)后经低噪放大器和衰减器,将二级放大滤波后的信号传至功分器;
2)安装被测芯片,将被测芯片的输入端从功分器的其中一个输出端接入,输出端为串口,连接至串口服务器上;
3)安装测试评估系统,测试评估系统软件安装在公开的便携式笔记本上,通过网线将串口服务器与笔记本电脑相连接,可收集被测件的输出导航信息,在收集完成所有的测试任务后,由测试评估软件将所收集到的被测件的导航信息与对照组的导航信息进行比较后获得评估结果。
d)第4步,测试执行,所有的设备安装完成之后,进入测试阶段,测试阶段分为静态测试和动态测试两个阶段。
1)测试小组组成,车载测试人员由一名司机、两名测试工程师和一名行驶路线导航员组成;
2)静态测试,测试及评估方法见测试规范;
3)动态测试,测试及评估方法见测试规范,测试工程师分别负责采集GPS对照组的导航信息和采集被测件信息,每个场采集点不低于1000点,为了保证采集点的数量,以被测件所采集的信息点为标准,GPS对照组的信息点采集的时间和数量 (以时间戳间隔计算)均要大于被测件的信息点采集数量;
4)测试数据的汇总和处理。
2 测试方法及测试场景分析
2.1 静态定位精度测试
2.1.1 静态测试概述
静态测试要求被测件处于固定的静止位置,采用一个不具备多径抑制功能的兼容性天线做为公共信号源,被测件要求在1 PPS信号上升沿秒边界输出NMEA数据,被测件的定位结果输出频度为1 Hz(1次/s),定位时刻截断毫秒,即仅取hhmmss,不进行毫秒的舍和入,采集的定位信息点的数量不少于9000个。
在采集定位信息点时,应以被测件所采集的定位信息点为准,所参考的GPS高精度差分接收机的采样定位信息点所标识的场景标记须大于被测件的定位信息点,即GPS高精度差分接收机采样场景标记所标识的测试时间段包含被测件定位信息的采集时间段。
2.1.2 测试目的
测试模块BD2在静止状态下的实际功能和性能表现。
2.1.3 测试方法
将多个待测模块同时放置在开阔地点,从冷启动一定时间后开始,进行静态实测。主要是为了使系统定位稳定后再开始测试,以免影响测试结果。实测过程中要获取足够多的数据,一般在静态下的定位精度需要获取1000个点以上的定位数据[5]。具体的操作方法可以根据实际的情况来定,将模块输出的NMEA语句通过串口保存到路测测试平台上,相关事项如下所述。
a)测试参考来源
将已知的天线中心所在点的定位信息 (由测绘局的测试所得)作为标准参考值。
b)天线安装
采用一个不具备多径抑制功能的兼容性天线,用功率分配器将信号接入各个待测模块中。
c)NMEA数据输出
将所有的待测模块通过串口扩展器,与测试平台连接,确保各个模块接收、发送数据的同步性。各个模块要求在1 PPS信号上升沿秒边界输出NMEA数据。设置模块定位结果的输出频度为1 Hz。定位时刻截断毫秒,即仅取hhmmss[6],不进行毫秒的舍和入。
2.1.3 评估方法
a)水平定位误差
将待测模块测试的经纬度与已知的天线中心所在点的经纬度进行比较,得到水平定位误差。
b)高程定位误差
高程定位误差主要是为了测试模块高程的定位偏移距离,并将待测模块测试的高度与已知的天线中心所在点的高度进行比较,得到高程定位误差。
2.2 动态定位测试
2.2.1 动态测试概述
动态测试要求被测件依次进入7种场景中进行测试,每次测试须采集不低于1000个定位信息点。
在采集定位信息点时,应以被测件所采集的定位信息点为准,所参考的GPS高精度差分接收机的采样定位信息点所标识的场景标记须大于被测件的定位信息点,即GPS高精度差分接收机采样场景标记所标识的测试时间段包含被测件定位信息的采集时间段。
2.2.1 测试目的
为了测试模块BD2在真实的应用场景下的功能和性能表现,拟选定几种场景综合测试模块的水平定位误差、高程定位误差、成功定位概率和测速误差。
2.2.2 测试方法
将多个待测模块同时安装在同一辆路测车上,在相同的环境下进行长时间的道路实测,将模块输出的NMEA语句通过串口保存到路测测试平台上,相关事项如下所述。
a)测试结果参考来源
将RTK+INS组合导航接收机的输出结果作为标准参考值。
b)天线安装
采用一个不具备多径抑制功能的兼容性天线,用功率分配器将信号接入各个待测模块中。
c)NMEA数据输出
将所有的待测模块通过串口扩展器,与测试平台连接,确保各个模块接收、发送数据的同步性。各个模块要求在1 PPS信号上升沿秒边界输出NMEA数据,设置模块的定位结果输出频度为1 Hz。定位时刻截断毫秒,即仅取hhmmss,不进行毫秒的舍和入。
d)路况记录
路测车上安装有1个摄像头,摄像头朝向车前进正前方,录制实时路况信息。
e)测试场景
整个跑车线路结合实际测试执行的可行性,覆盖以下场景,如表1所示。
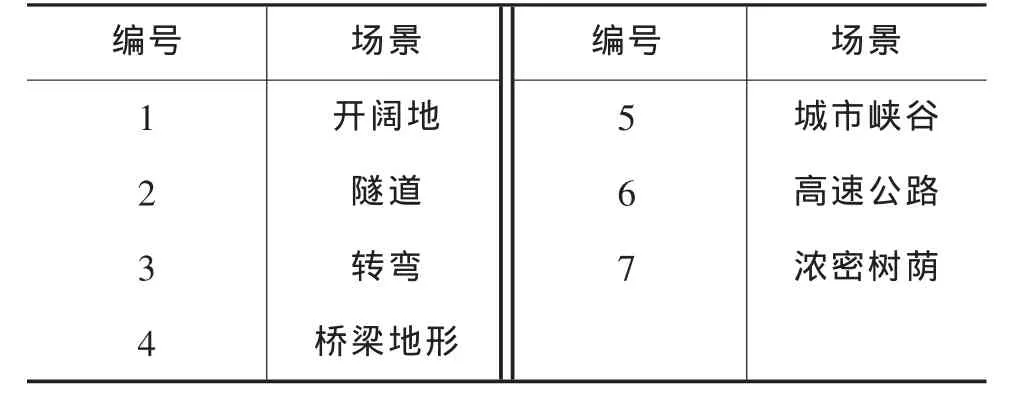
表1 测试场景
2.2.3 评估方法
a)水平定位误差
将待测模块测试的经纬度与RTK组合接收机的参考经纬度进行比较。
b)高程定位误差
将待测模块测试的经纬度高程与RTK组合接收机的参考经纬度高程进行比较。
c)成功定位概率
成功定位的概率是指测试模块在各种路况下能够成功定位的概率。成功定位概率是成功定位概率=成功定位次数/总运行时间。其中,成功定位次数即RMC语句输出标记为 “A”,而且定位误差在100 m(包括100 m)范围内的定位,总运行时间即从平台下发指令开始到平台停止接收定位结果为止的这段时间。
d)测速误差
主要是为了考核模块在各种路况下的测速误差,将待测模块输出的速度与RTK参考速度进行比较。
2.4 测试场景分析
本次实际道路测试的测试场景选取了开阔地、隧道、转弯、桥梁地形、城市峡谷、高速公路和浓密树荫等7种特殊地形。
在进行实际道路测试时,每个场景都要获取1000个定位数据,每获取一个定位数据的时间为1 s左右,获取1000个定位数据则需要1000 s,大约为20 min。进行隧道场景的测试时,要求隧道足够长,至少为500 m,以方便掉头;转弯场景的弯道要足够大,直径至少为50 m,否则容易造成疲劳驾驶,而且弯道上是没有红绿灯的;桥梁地形一般选择高架桥;城市峡谷则要求道路比较窄,一般一边两车道,两边均是高楼大厦,这样从视觉上就会形成一种峡谷的感觉;高速公路则选择封闭的路段,注意选择时要考虑是否掉头这一问题;浓密树荫场景测试则要选取两旁有遮天蔽日的树荫的道路,树荫连成一片为最佳。
在每个场景均要行驶20 min,一般路段没有这么长,所以要充分考虑路段的调头功能,以及高峰时期的堵车情况。每个场景的测试时间为20 min,则7个场景的总测试时间为140 min,再加上场景转换过程中的时间,一次测试下来所需要的时间大概为180 min,即3 h,所以在进行场景路段的选择时必须要仔细分析路段的各种情况,以及场景路段之间的衔接问题。
3 比对测试方法的改进
与以往的测试环境相比,本次设计的测试环境引入了比对测试功能,可以支持多个被测件同时进行测试,很好地解决了被测对象同时享有同等的测试输入和测试环境这一问题,就不需要进行多次测试,毕竟一次测试需要的时间很长,而且多次测试容易造成疲劳驾驶,使测试的危险系数增大。
为保证多个被测对象同时进行测试,首先,必须解决信号问题 (这里的卫星定位信号是模拟信号,不是数字信号,不能单纯地复制信号,所以需要使用放大器将定位信号放大至适合的倍数);然后,再分解成多个同等的信号供给被测件 (信号放大后容易受到干扰,所以这里需要使用偏置盒对信号进行微调和过滤)。
4 结束语
首先,本文介绍了卫星定位系统的定位原理和实际道路测试模型;其次,介绍了测试模型的实现方法和方式;最后,分析了实际测试的部分场景的测试结果。通过对双模定位模块的实际道路测试模型的研究,成功地研究出了双模模块的道路测试方法和测试环境;同时引入了多个模块比对测试的概念,使该测试模型的效率得到很大的提高,并且在一定程度上提高了比对测试过程中的公平性。
[1]冉承其.北斗卫星导航系统发展计划的实施 [J].数字通信世界, 2011 (6): 15-17.
[2]陈新保.北斗卫星导航系统民用市场建设的思考 [J].中国航天, 2010 (1): 17-21.
[3]李俊锋.北斗卫星导航定位系统与全球定位系统之比较分析 [J].北京测绘,2007(1):51-53.
[4]冯阳萍.论北斗导航在道路运输业的应用 [J].电子测试, 2014 (1): 134-136.
[5]魏子卿.我国大地坐标系的换代问题 [J].武汉大学学报(信息科学版), 2003, 28 (2): 138-143.
[6]范龙,柴洪洲.北斗二代卫星导航系统定位精度分析方法研究 [J].海洋测绘,2009,29(1):25-27.
