多传感器数据融合在爬架控制系统中的应用*
2015-12-07陈斌,金堃,李宏
陈 斌,金 堃,李 宏
(宁波大学信息科学与工程学院,浙江宁波315000)
0 引言
随着我国经济的快速发展,高层建筑越来越多。在高层建筑施工过程中,爬架起着越来越重要的作用[1,2]。爬架的控制系统不仅用于控制爬架运行状态(如启动、停止)和监测爬架载荷,更需要对爬架可能出现的危险状况(如超载、失载等)进行报警,从而防止险情的发生。
传统爬架控制系统一般使用重力传感器来检测爬架系统的载荷,当爬架超载或失载时,系统进行警报。但是,爬架运行时,实际情况十分复杂,爬架主体的倾斜或者爬升速度异常都可能出现险情,而传统爬架控制系统并不能对这些情况进行有效的检测。通过在系统中增加倾角传感器和位置传感器,在测量载荷的同时,也对倾斜角度和爬升速度进行测量,以便从不同的角度对危险情况作出评估。在获得多传感器数据的情况下,使用怎样的预警策略对预警的准确性和爬架系统的可靠性都有着重要的影响。一般的方案是当某一参数超过预警值时,系统发出报警信号,但这种报警策略只反映了爬架的局部特性,并不能准确地反映整个爬架的安全状态,不能起到很好的预测效果。
针对上述情况,本文提出了一种通过多传感器数据融合技术提高爬架控制系统安全预警性能的方法,该方法基于BP神经网络的数据融合[3~6]。它通过将载荷、倾角和速度进行数据融合,使得传感器之间的信息得以互补,较好地反映爬架的实际运行状况。通过验证,该方案明显提高了预警的准确性,从而提高了系统的可靠性。
1 爬架控制系统结构
爬架控制系统主要由一个主控器和多个分控器组成。分控器作为融合算法的硬件载体,它外接3只传感器:倾角传感器、重力传感器以及位置传感器,分别测量爬架的倾斜角度、拉力以及高度,其中,高度的变化率即为爬架速度。融合算法的软件实现是将3只传感器的数据通过神经网络进行融合、判断,从而对险情做出报警。主控器通过CAN总线与多个分控器相连,分控器将融合结果和各传感器数据通过CAN总线上传到主控器,主控器将启动、停止等指令下发给分控器。爬架控制系统的结构图如图1所示。
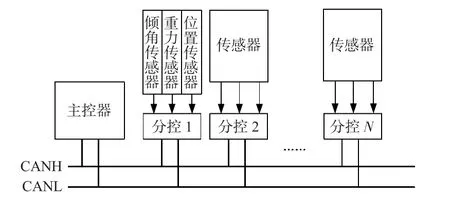
图1 爬架控制系统结构图Fig 1 Structure diagram of climbing scaffold control system
2 基于BP神经网络的数据融合算法
2.1 数据的融合技术
数据融合是一个多级、多层面的数据处理过程,主要完成对来自多个信息源的数据进行自动检测、关联、估计及组合等的处理[7,8]。根据数据处理的分辨率可以将数据融合的结构分为像素级融合、特征级融合、决策级融合。根据爬架系统的要求,采用基于BP神经网络的数据融合算法,这是一种特征级融合。
2.2 BP神经网络
BP算法是一种用来训练非线性网络的随机最快下降法,网络训练包括前向计算和反向传播两个过程,通过敏感性的反向传播来调整网络参数,直到误差满足要求为止。敏感性的反向传播公式为[9]

权值和偏置值更新的公式为

其中,sn为敏感度矩阵;bn为偏置值矩阵;pn为未通过传输函数的输出向量;α为学习速度;on为通过了传输函数的输出向量;t为期望的网络最终输出矩阵;Wn为权值矩阵;y为实际的网络最终输出阵;Fn(pn)=)为传输函数的导数。
通过不断地对比与调整,本文选择了由4变量输入层、1层隐含层和1变量输出层构成的BP网络,网络结构如图2所示。
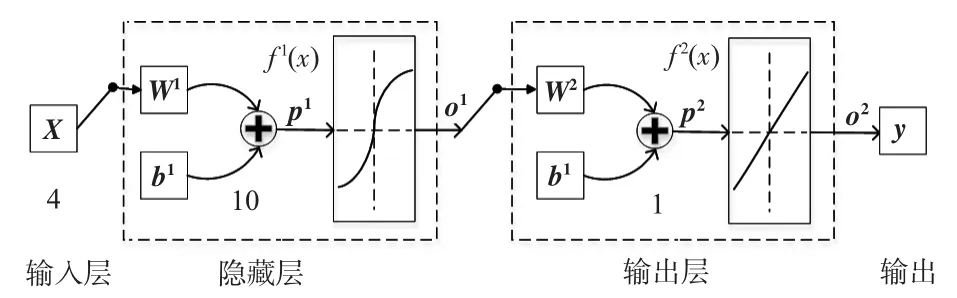
图2 BP神经网络结构图Fig 2 Structure diagram of BP neural network
借助Matlab神经网络工具箱对样本进行训练,可以得到网络的权值和偏置值。
2.3 训练样本的选择
样本的选取对网络性能的影响十分关键,在选取样本时,既要考虑到正常情况下的样本,也要考虑到各种各样的故障样本。爬架在运行过程中,可能会出现的情况可分为以下几类:正常运行、速度异常、载荷异常、电机故障以及爬架倾斜等。针对这些,采集了一系列训练样本,由于样本间的数据差异较大,需要对其进行归一化处理,这里采用min-max标准化的归一化方法,转换函数如下

其中,x*是归一化后的样本值,x是归一化前的样本值,max,min分别为样本的最大和最小值。
本设计的部分样本数据和归一化之后的数据如表1所示。
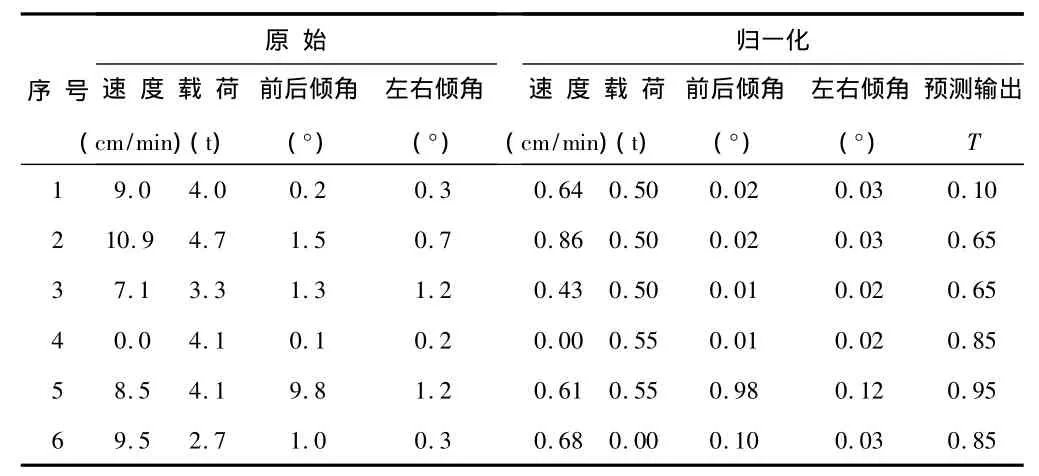
表1 部分样本数据表Tab 1 Table of part of sample data
其中,序号1为正常运行的样本;2,3是速度异常的样本;4是电机故障的样本;5是爬架倾斜的样本;6是载荷异常的样本。预测输出T小于0.60时,系统判定为安全;大于0.60且小于0.85时,判定为警告;大于0.85时,判定为危险。
2.4 网络参数的确定
建立BP神经网络最重要的是网络权值与偏置的确定。通过训练对隐含层神经元的个数和传输函数进行调整,使得网络的运行效率和融合结果都比较合适。最终的网络结构是:隐含层包含10个神经元,作用函数为tansig函数,输出层作用函数是purelin函数。BP神经网络的训练过程在Matlab中实现[10],训练结束后,可得到网络的权值与偏置值。网络训练过程的误差变化如图3所示,均方差在第137步达到0.0052665。
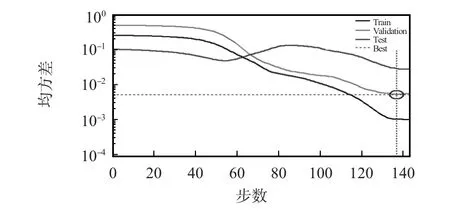
图3 BP神经网络训练过程误差曲线Fig 3 Error curve of BP neural network training process
3 融合算法的实现
3.1 分控器硬件结构
作为融合算法的硬件载体,分控器的硬件主要由数据采集部分、数据融合部分、数据传输部分组成,除此之外,还有电源部分、显示部分,以及电气控制部分,结构框图如图4所示。
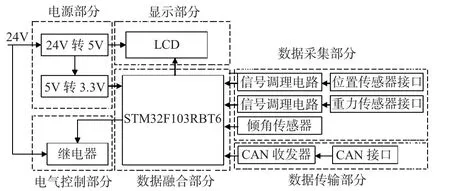
图4 分控器结构框图Fig 4 Structure block diagram of sub controller
数据采集部分包括传感器接口和信号调理电路。数据融合部分是通过单片机实现融合算法。所有数据都在CAN总线上传输。
3.2 分控器软件设计
分控器的软件结构也可分为数据采集部分、数据融合部分、数据传输部分、显示部分以及控制部分,分控器软件的流程图如图5所示。
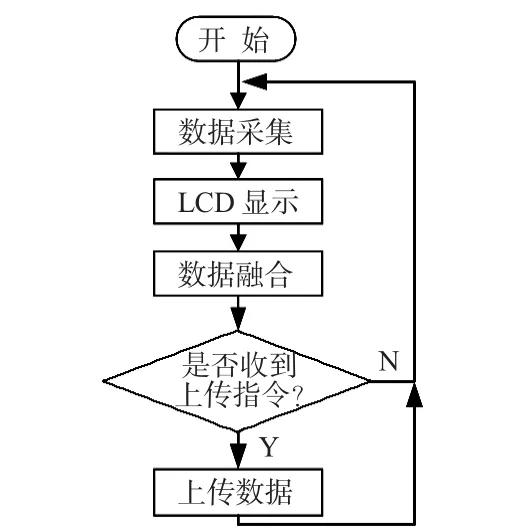
图5 分控器软件流程图Fig 5 Flow chart of sub controller software
其中,数据融合部分是核心,完成的是矩阵的运算,计算公式为:y=f2(W2f2(W1X+b1)+b2),其中,W1,W2,b2,b1是通过训练得到的网络参数,在软件中可用常数数组实现。f1,f2是网络的传输函数,由于控制器对数学函数的计算速度比较慢,可以采用查表的方式实现,可提高计算速度,具体流程如图6所示。
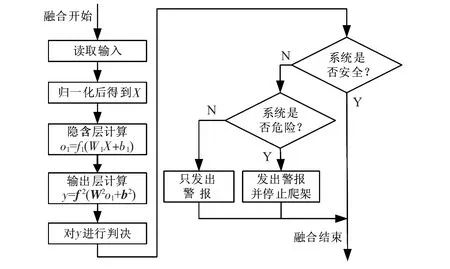
图6 数据融合流程图Fig 6 Flow chart of data fusion
4 系统测试
由于现场测试十分困难,本文模拟了几种爬架运行过程中实际可能会出现的情况,并测得几组测试数据。将测试数据分别输入到分控器和Matlab中构建的神经网络,得到2组融合结果。
为了和传统的爬架控制系统对比,对传统的爬架控制系统也进行了测试,该控制系统的判决函数如下
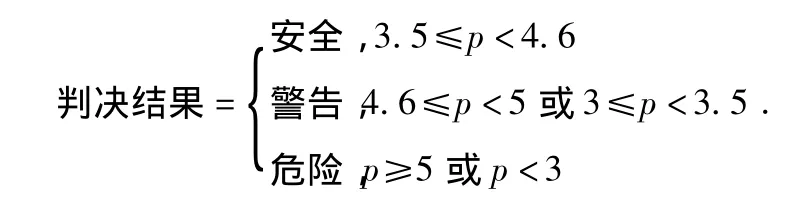
最后的测试结果如表2所示。
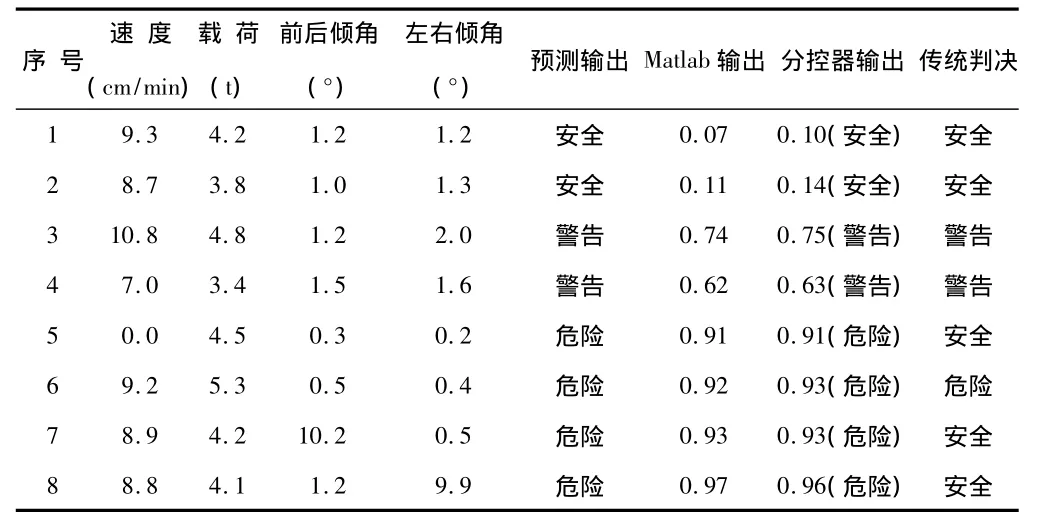
表2 测试数据表Tab 2 Table of test data
由表2可知,Matlab输出的结果与分控器的输出结果十分接近。这说明在Matlab中构建的神经网络应用在分控器上效果良好,分控器的输出通过式2~6判决后,与预测输出完全一致,而传统爬架控制系统的判决结果中,第5,7,8三组漏报了险情。因此,基于融合算法的系统具有很好的报警准确性。
5 结束语
本文就传统的爬架控制系统安全评估角度单一,报警准确率低的缺陷,提出在增加角度传感器和拉线传感器的基础上,通过对BP神经网络学习过程的研究和对分控器硬件平台的搭建及软件结构的分析,将基于BP神经网络的数据融合算法应用在爬架控制系统中。测试结果表明:该融合算法不仅能多角度评估系统的安全性,而且可以明显地提高预警准确性和系统的可靠性。
[1]强阿梅.导轨式爬架在高层建筑中的应用[J].山西建筑,2002,28(2):69-70.
[2]宋 健.爬架在高层建筑施工中的应用研究[J].黑龙江科技信息,2013(8):277.
[3]Kokar M,Kim K.Review of multisensor data fusion architectures and techniques[C]∥Proceedings of 1993 IEEE International Symposium on Intelligent Control,IEEE,1993:261-266.
[4]Luo R C,Yih C C,Su K L.Multisensor fusion and integration:Approaches,applications,and future research directions[J].Sensors Journal,IEEE,2002,2(2):107-119.
[5]程利民,孔 力,李新德.信息融合方法及应用研究[J].传感器与微系统,2007,26(3):4-9.
[6]黄漫国,樊尚春,郑德智,等.多传感器数据融合技术研究进展[J].传感器与微系统,2010,29(3):5-12.
[7]康耀红.数据融合理论及应用[M].2版.西安:西安电子科技大学出版社,2006.
[8]Lawrence A Klein.多传感器数据融合理论及应用[M].戴亚平,译.北京:北京理工大学出版社,2004:37-57.
[9]Martin T Hagan.神经网络设计[M].戴 葵,译.北京:机械工业出版社,2002:197-221.
[10]张德丰.Matlab神经网络应用设计[M].北京:机械工业出版社,2009:92-119.
