电子节气门动力失控工况诊断及故障模式管理
2015-12-06漆正刚GarySpring许匀峰赵新庆
漆正刚,Gary Spring,许匀峰,王 聪,詹 迅,赵新庆
(重庆长安伟世通发动机控制系统有限公司产品研发部,重庆 401122)
电子节气门(electronic throttle body,ETB)广泛应用于现代汽车汽油发动机。相较于传统的机械式节气门,在发动机管理系统(engine management system,EMS)中引入电子节气门控制,为实现从动力源发动机到变速传动系统的动力控制提供了新的控制维度,通过综合控制节气门开度、点火提前角、喷油脉宽与变速器速比为车辆实现最优工况提供了更多可能性[1-2]。在实现更优、更精准控制的同时,电子节气门的引入也增加了EMS硬件的复杂性,降低了硬件系统的可靠性,包括增加了测量节气门实时位置的节气门位置传感器(throttle position sensor,TPS)、驱动节气门轴转动的直流伺服电机及其相关的连接线路等,这些都可能成为引发电子节气门控制失效的诱发因素。
目前国内学界对于电子节气门的失效方式基本都划分为节气门位置传感器线路的断路和短路故障、驱动电机控制线路的断路和短路故障,以及采用冗余设计时两路节气门位置传感器的校核一致性故障等[3-5]。对于在线路连接状态良好的情况下由于传感器内部部件损伤导致的传感器信号偏移而引起的信号测量失准,以及直流伺服电机励磁线圈老化、碳刷磨损、电磁干扰等导致的电机工作状态发生突变等情况[6-8],目前尚无较好的识别和应对策略。虽然发生上述严重故障的概率较低,但是一旦发生大幅度信号偏移或者电机工作状态突变,导致电子节气门开度发生阶跃性激增,将会直接引发车辆瞬时加速度的激增,出现动力失控,影响行车安全。如果不能及时识别并做出主动性干预,将会导致严重的人车安全事故。本文以某自主品牌微型商用车型为研究对象,在其搭载的发动机控制系统平台基础上,提出一种以发动机进气量为测量判断指标识别电子节气门动力失控工况的方法,对故障模式下的节气门动作实现有效管理。
1 TPS信号偏移及影响
EMS系统采用双路节气门位置传感器,冗余设计方式可以提高控制系统零部件的可靠性,当其中一路信号失效时,另一路信号仍然可以发挥作用。如图1所示:①处为死点,由限位螺钉限制节气门最小开度,对应的绝对角度为7°,并作为相对角度的零点;②处为2号传感器测量角度饱和点,对应绝对角度大约为56°,相对角度约为49°;③处为节气门最大开度,约为绝对90°,相对83°。2号TPS在中小角度范围内(0°~46°)具有较高的测量精度,1号TPS在中大角度范围内(46°~90°)具有较高的测量精度,因此在未诊断出TPS信号故障时,EMS将分段采用较高精度的TPS输出信号作为主要控制依据。
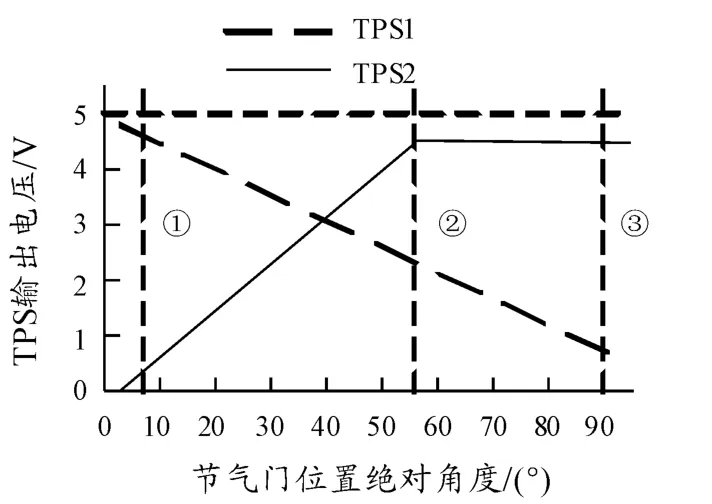
图1 节气门位置传感器输入-输出特性
当节气门位置传感器受到强烈撞击等外在因素影响时,内部滑动变阻器发生变形(针对变阻器式TPS),或者霍尔器件破损、安装位置偏移(针对霍尔式TPS)等,会直接改变节气门位置传感器的输入输出特性,使测量反馈给控制系统电控单元的节气门位置与实际位置之间产生较大偏差。图2为较为极端的双路TPS均遭受特性偏移的情况。
偏差产生之后,由于输出信号仍然在上下限合理范围之内,传统的电压诊断方式无法识别,并且在②与③位置之间,由于TPS2信号已达饱和,TPS1信号失去了相互比对校核的依据,使1号传感器的特性偏移更加难以识别。图2中,在输出电压为2.5 V时,TPS2的输出特性由a点偏移至b点,TPS1的输出特性由c点偏移至d点。图示的信号偏移方向会使系统获知的当前节气门开度比实际开度小,系统将错误地指令驱动电机加大节气门开度,使实际进气量远超目标进气量,发动机输出扭矩剧烈增加,将导致车辆动力失控。如果传感器特性呈反方向偏移,系统获知的节气门开度比实际开度大,将错误指令驱动电机减小开度,造成车辆加速无力,但不至于发生危险驾驶情况。
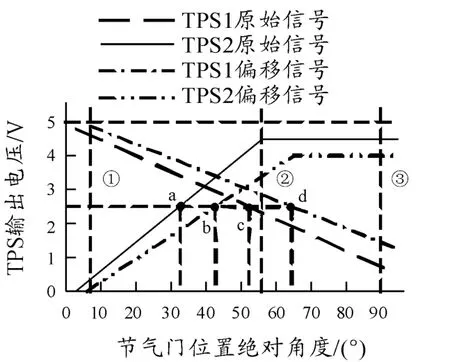
图2 节气门位置传感器特性偏移
在现实情况中,传感器特性偏移极少呈现整体偏移现象,更多的是偏移发生在某一个或者某几个区间内。输入输出特性的不稳定性将会导致在驾驶车辆时反复出现剧烈耸动,特别是在低速挡大扭矩输出时极易发生危险驾驶工况。
2 驾驶动力需求转换
电子节气门控制使节气门实际开度与加速踏板开度之间不再呈现固定关系。节气门目标开度指令的发出需要经过一个“加速踏板开度—目标扭矩—修正扭矩—目标进气量—目标开度”的转换过程。在转换过程中,自动变速箱扭矩请求、巡航控制请求、牵引力控制请求等均可以适时介入,极大地体现了电子节气门对于扭矩控制的灵活性。
由驾驶员通过加速踏板开度βped请求提出基本动力需求,经过加速踏板特性转换为基本扭矩需求Tbase。为了提高扭矩控制的平顺性与稳定性,与通常的加速踏板特性相比增加了1个维度,这是关于踏板开度与发动机转速n的三维函数,如图3所示。调整加速踏板特性可以改变整车对于驾驶员需求的响应性能,直接影响驾乘主观感受。
基本需求扭矩提出后,系统将考虑到发动机摩擦损失Tfric、发电机动力损失Talt、空调动力损失Tac、冷却风扇动力损失Tvsf以及机油泵动力损失Tpump等因附件工作造成的发动机扭矩消耗,以及汽车行驶过程中的迎风阻力Tdrag等,见式(1)。由于发动机不可能始终工作在标准工况下,因此还将对扭矩进行海拔自适应补偿、水温修正和进气温度修正(见式(2)),用以精确比对台架试验时恒标准工况下标定出的发动机净扭矩。
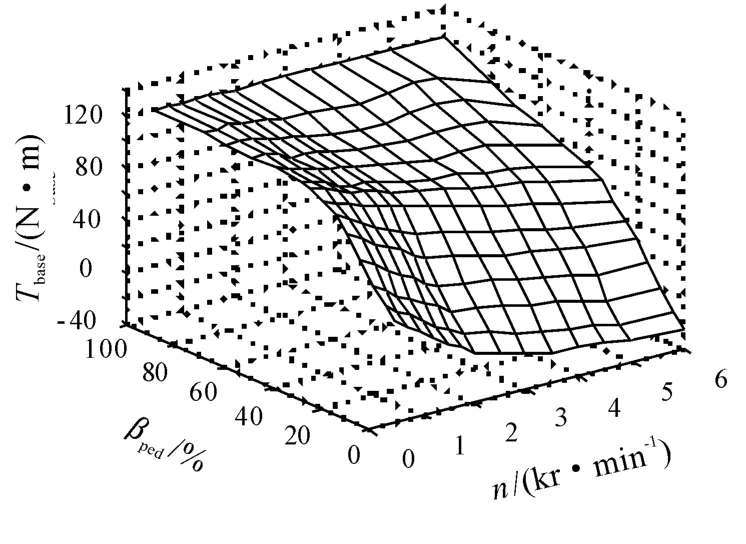
图3 加速踏板特性

式中:Pair为当前实测的大气压力;Kect为当前实测的发动机水温;Kact为当前实测的发动机进气温度。
在恒标准工况下进行发动机台架试验,测量出在化学当量空燃比条件下发动机处于爆震临界点火角时的指示扭矩Tind,它是关于发动机转速n和发动机负荷Lload的三维函数。定义负荷为当前工况下发动机实际进气量Acurr与标准工况下发动机进气量Astan的比值,见式(3)。发动机机-车体一体化后,发动机工作时并非始终处于爆震临界点火角,实际空燃比也会偏离化学当量空燃比,4缸机的各喷油器也并非全时工作,因此发动机实际输出扭矩Tactu并不等于指示扭矩,而是相较于标准工况下输出扭矩呈现比例下降的趋势,见式(4)。因此,当前工况下发动机目标进气量需要经过一个反算过程得出:首先由当前工况下实际点火角、实际空燃比和喷油器工作数量求出发动机目标指示扭矩Tind_des,见式(5);再由转速和目标指示扭矩查如图4所示关系的三维表得出目标发动机负荷Lload_des;最后,由式(6)计算出目标进气量Ades。

式中:Δω表示当前点火角偏离爆震临界点火角的绝对角度;λ表示实际空燃比控制值;Ninj表示处于工作状态的喷油器数量比例。
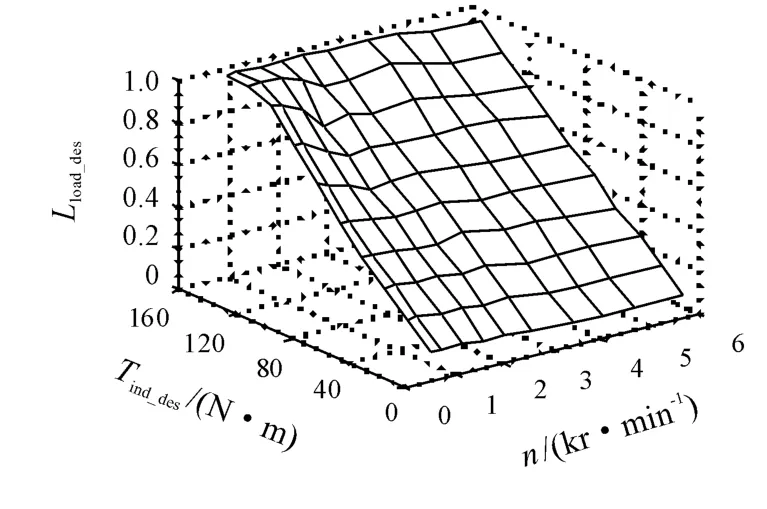
图4 扭矩-负荷转换曲线
根据流体质量流量方程,可以得出如式(7)所示的通过节气门阀片的进气质量流量Mair,再根据气体状态方程将式(7)变形为式(8)。方程变形过程主要考虑将节气门阀片前后的气体压力比Pratio作为一个整体变量,以便于通过试验标定的方法将复杂繁冗的计算过程转换为查表计算方式,从而简化了控制过程。这使得某一特定型号的电子节气门大批量生产应用具有较好的实用性。

式中:ρair表示通过节气门阀片的气体密度;vair表示气体流速;Deff表示电子节气门有效截面积;Putm为节气门阀片前端压力;Pman为节气门阀片后端压力;C1为气体常数。
将式(8)变形为式(11),即得出节气门阀片有效截面积。根据特定型号的电子节气门流速特性将式(11)中所有关于气体压力比Pratio的量通过试验标定方法做成曲线,如图5所示。再根据图6所示节气门阀片特性曲线将有效截面积转换为目标节气门开度βthro_des,即完成了驾驶员动力需求到电子节气门目标开度的完整转换过程。给出目标节气门开度以后,以节气门位置传感器实时位置作为反馈,通过驱动电机动作对节气门开度作闭环PID控制。


图5 气体压力比相关输出
3 动力失控工况识别
TPS信号偏移致使PID闭环控制反馈量失真。在图2所示的严重失真情况下,反馈给控制系统的节气门开度比实际开度小,造成闭环控制的最终结果是实际开度比目标开度大,供应给发动机的进气量比驾驶需求的进气量大。基于进气量的燃油量喷射原理如式(12)所示。由于系统无法检测到TPS故障,所以系统无法进入电子节气门故障管理模式,也不会对燃油喷射进行干预。在由未失真的TPS运行工作区间突然转入严重失真的TPS运行工作区间时,将会有瞬时的输出扭矩爆发,并可能持续一段时间,造成车辆动力失控。
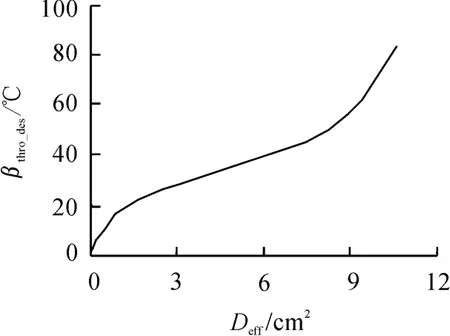
图6 节气门开度特性

式中:Mfuel为目标喷油量;Mtran为瞬态燃油补偿量;Mpurg为燃油蒸发系统来油量;Amap为基于进气压力传感器信号计算的发动机实际进气量。
节气门位置传感器信号偏移造成节气门控制位置偏差,节气门位置控制偏差最终反映为发动机的进气量偏差。实际进气量的测量计算可以从进气压力传感器信号快速得出,因此可以从目标进气量与实际进气量的差异角度来识别车辆动力失控工况,以便在故障出现时及时识别并主动干预。
3.1 发动机充气计算
试验车辆使用进气压力传感器作为测量发动机进气量的基础信号。传感器输出为电压信号,因而发动机实际进气量的获取需要经过一个换算过程。图7为进气压力传感器输入输出特性,可见标准工况下在其有效测量区间内,输入输出呈现近似线性关系,表达为式(13)。根据气体状态方程,在标准工况下进气压力与充气质量流量成正比关系。将式(13)改写为式(14),再将式(14)变形为式(15),即可以通过进气压力传感器的输出信号Vmap求得充气质量流量中间值Aful。
将当前发动机工况下的斜率a3经过进气密度修正φ8、工况条件修正φ9和容积效率修正φ10(见式(16)),截距b3经过工况修正φ11和大气压力修正φ12(见式(17)),最后由式(18)得出最终的发动机实际进气质量流量Aactu,式中Ncyl为发动机总的气缸数量。
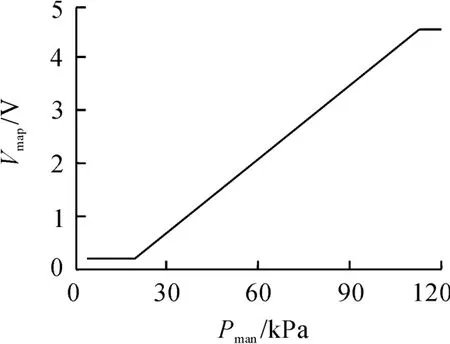
图7 进气压力传感器输入输出特性
3.2 动力失控工况判定
目标进气量与实际进气量的计算以曲轴位置传感器信号缺齿周期的1/2为软件任务执行调用周期,能够快速、有效、及时地进行信号更新,真实反映当前状态下进气量的变化。采用目标进气量与实际进气量之间的偏差量判定动力失控工况的流程如图8所示。
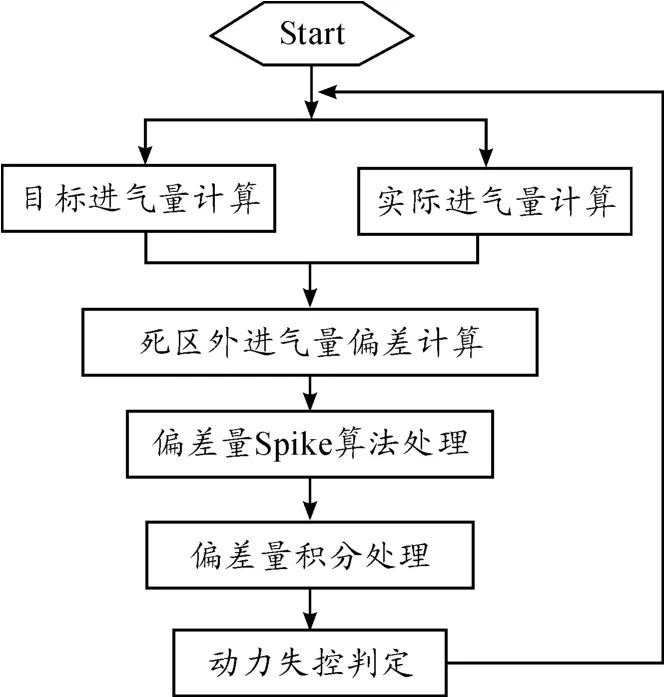
图8 动力失控判定流程
死区外进气量偏差计算按式(19)。死区Ahyst的设置在不同的转速下有所区别,转速越大死区范围越大,用以对应不同的基本扭矩需求,即在大扭矩需求下允许目标进气量与实际进气量之间的偏差稍大,在小扭矩需求时允许目标进气量与实际进气量之间的偏差稍小,并根据实车试验对每个工况点进行适当标定修正,以消除固有误差的影响。修正结果如图9所示。



图9 进气偏差量死区
发动机机舱内部环境相对复杂,加之传感器本身的原因可能产生噪声干扰信号,信号毛刺尖峰会使信号本身严重失真,因此对式(19)计算出的死区外进气量偏差使用Spike函数进行自适应过滤处理[9-10]。Spike算法包含一个自适应窗口和一个自适应增益系数,增益系数为大于1的常量。当信号出现尖峰时,超出自适应窗口的值将被过滤掉,并使用窗口上/下限值作为有效值,同时自适应窗口会利用增益系数随着信号的变化逐步放大或者逐步收敛。Spike算法流程如图10所示。
经过Spike算法处理后的进气量偏差值Aerr_new以16 ms的任务执行周期进行积分处理,得到Aerr_int,并且将其值与判定限值实时比较。一旦超过限值Aerr_thr立即置位于动力失控标志位Fpocflg(见式(20)),判定为发生动力失控工况。此标志位将传递给EMS系统其他工作模块,立即对节气门驱动电机和喷油进行干预,防止动力失控工况长时间持续,避免危险驾驶情形的发生。
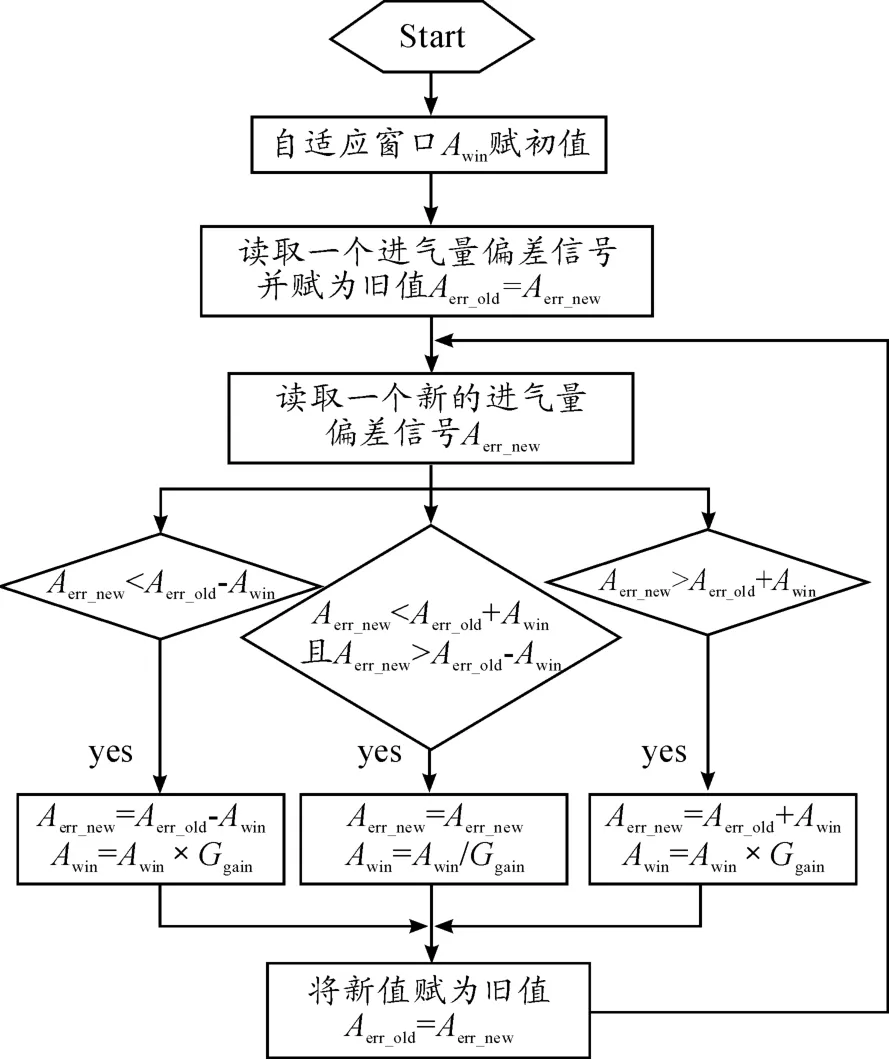
图10 Spike算法流程
4 动力失控故障管理
当发生动力失控工况时,电机进行正常响应的参考信号已经严重失真,应该禁止电机的驱动功能。因此,通过电控单元内部的电机驱动电路使电机励磁线圈断电,节气门阀片轴由于电子节气门体内部的两根复位弹簧的作用回到并始终维持在一个固定角度。试验车辆使用的电子节气门对应的固定角度为相对8°,绝对15°。当驾驶车辆出现动力失控时,对驱动电机直接干预优于对燃油喷射进行干预,前者既能够及时制止危险驾驶工况又能够较好控制发动机的稳定性,而后者极易造成发动机熄火,导致车辆失去辅助制动的动力源,造成新的危险工况。
变速器在前进挡并且踩下加速踏板时,EMS进入“跛行回家”模式,相对8°的固定角度进气量足以维持车辆“跛行回家”的动力需求,但加速踏板开度信号无法再灵活提出动力需求,只有踩下加速踏板与未踩下加速踏板两种请求状态,车辆的加速能力受到极大程度的制约,从而避免了本次驾驶循环再次发生动力失控工况的可能性。
变速器处于空挡状态且未踩下加速踏板时,EMS进入“游车怠速”控制模式。“游车怠速”与普通怠速控制有所不同,它要求在怠速状态下发动机转速高低起伏波动,但不会熄火,既能够满足“跛行回家”功能需求,也能起到提醒驾驶者的作用。因此,将“游车怠速”模式的基本目标怠速设置为1 000 r/min,高于普通怠速模式的750 r/min。当实际转速n小于1 000 r/min时,要求所有4缸喷油器均正常工作。由于节气门开度为相对8°,因此其提供的能量足以使转速上升到1 000 r/min以上。当转速大于1 000 r/min时,切断2个气缸喷油器以使转速回复到目标转速;当转速大于(1 000+n1)r/min以后,切断3个气缸喷油器;当转速大于(1 000+n2)r/min时,切断所有4缸喷油器,如图11所示。最终达到“游车怠速”的主观驾乘感受,并且在仪表盘上的发动机故障灯会闪烁显示。
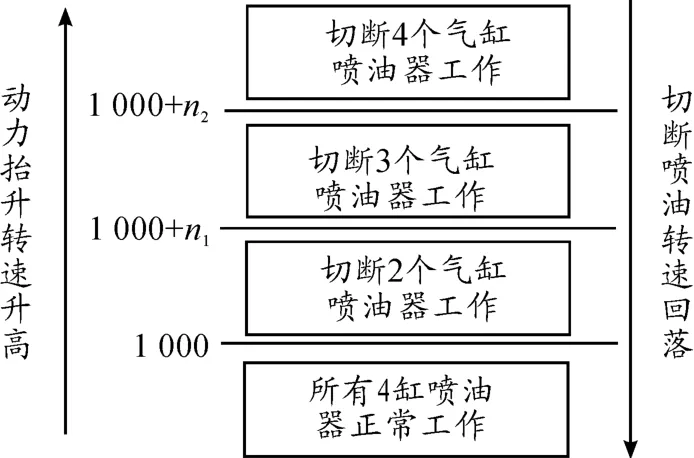
图11 “游车怠速”控制基本原理
5 试验研究
5.1 动力失控工况识别功能验证
对提出的控制策略在试验车辆上进行实车驾驶试验验证,并主要针对1挡和2挡等传动系统大扭矩输出工作区间进行试验,结果如图12~15所示。为模拟由于TPS信号偏移造成的控制电机工作状态突变,在控制电机输入控制信号上外加一个持续扰动βadd,用以触发动力失控工况。在图12~15中:aace为车辆加速度;Vmotor表示电子节气门驱动电机控制电压;Ades为目标进气量;Aactu为实际进气量。
在图12中未打开动力失控工况识别功能,在使用1挡中等油门踏板开度进行车辆加速的过程中,突然外加持续扰动。此后发动机转速在2.3 s内由3 100 r/min被急速拉升至6 000 r/min,车辆加速度也急剧增加,驾驶员能够感受到十分明显的车辆前冲,本能驱使采取松油门和踩刹车的制动措施。但在驾驶员大脑决策并主动采取措施之前的3~4 s,整个车辆仍然具有相当大的加速度,车辆难以控制。在图13中则打开了动力失控工况识别功能,在外加扰动后的大约1.2 s内,系统迅速检测到实际进气量比目标进气量过多的危险情况,并立即对节气门驱动电机采取断电措施(Vmotor=0),使实际进气量被限制在安全范围内,有效避免了车辆动力继续失控。进入故障管理模式后,目标进气量请求命令失效,系统不再对其值进行更新。
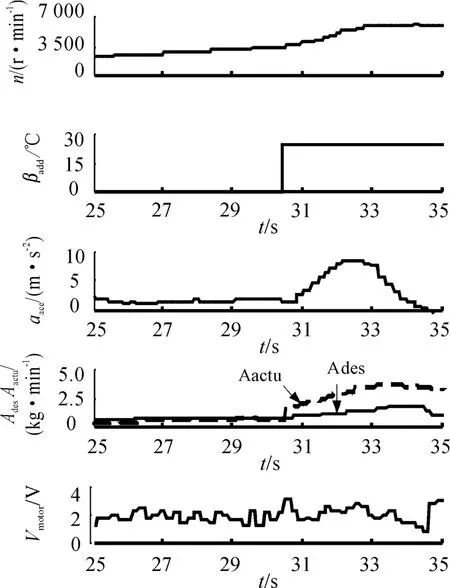
图12 1挡行车动力失控情况(无故障管理介入)
在图14中未打开动力失控工况识别功能,使用2挡中大油门踏板开度进行车辆加速试验,突然外加持续扰动。此后发动机转速快速提升,车辆加速度也有一定程度的增加,只是由于变速器速比较1挡小,因此动力失控程度相对较轻。但是此种相对较轻程度的动力失控也会使低速挡车速无法维持在一个较小的平衡车速位置,车辆会始终处于加速状态。由于加速度较大,也存在极大的安全隐患。在试验过程中,拥有丰富驾驶经验的专业驾驶人员在维持原来的驾驶状态情况下,对于2挡动力失控的情况均表示难以驾驭。在图15中打开识别功能,在扰动发生后的大约1.5 s内系统就完成了对动力失控工况的判定,并对控制电机采取断电措施。
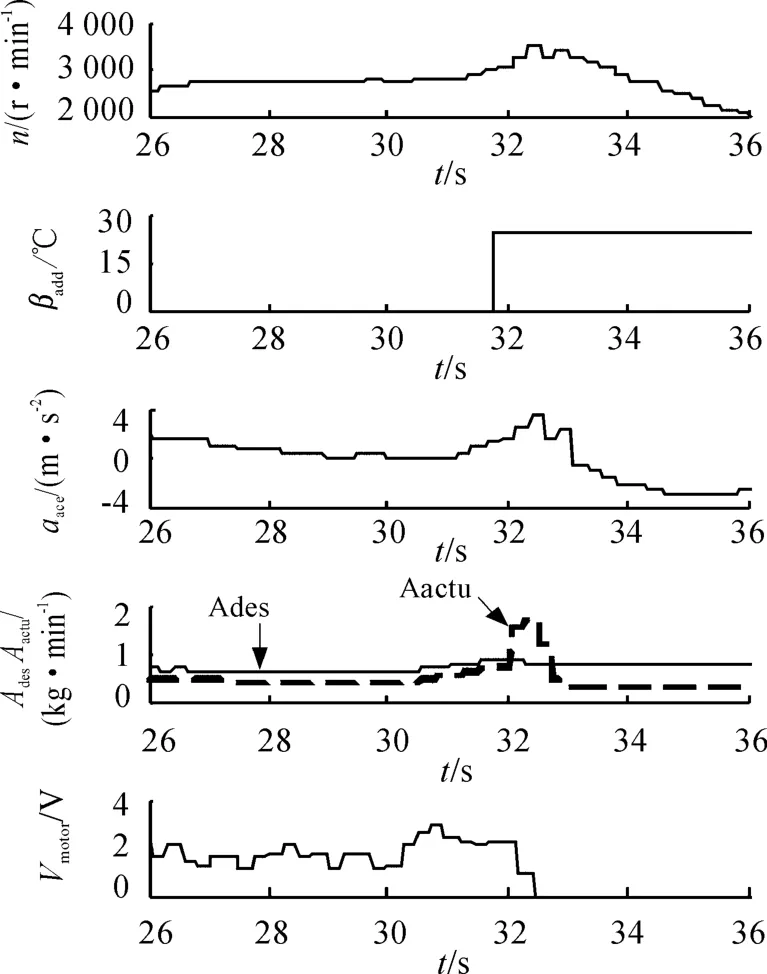
图13 1挡行车动力失控情况(有故障管理介入)

图14 2挡行车动力失控情况(无故障管理介入)
统计多次从外加扰动开始到电机断电之间的时间间隔,结果见表1,可见该时间间隔均能控制在1.6 s以内。试验结果表明:在发生动力失控工况后,系统能在很短的时间内识别故障并及时采取主动干预措施,有效避免了危险驾驶状况的发生。

图15 2挡行车动力失控情况(有故障管理介入)

表1 消除动力失控时间统计 s
5.2 “游车怠速”功能验证
在正常怠速时,发动机转速波动平稳,基本在目标转速±20 r/min以内波动,偶有±30 r/min的波动,20 s内的转速标准偏差为11.8 r/min,驾驶者主观感受几无不舒适感,如图16所示。当在动力失控被识别并触发故障管理模式的怠速状态下时,发动机转速在1 000 r/min上下作更大幅度、更高频率的波动,波动幅度达到±60~100 r/min,波动频率明显快于正常怠速,20 s内转速标准偏差达到39.7 r/min,驾驶者能非常明显地感受到发动机的振动,听到高低起伏的“游车”声音,如图17所示。同时,从仪表盘上可以观察到发动机故障灯有规律地闪烁,从而起到提示驾驶员当前发动机处于危险工作状态。

图16 正常怠速时转速波动
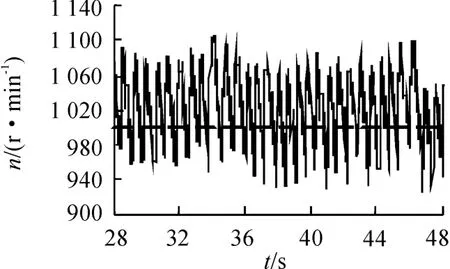
图17 “游车怠速”时转速波动
6 结束语
分析了电子节气门重要部件TPS信号偏移对发动机进气量控制的影响,指出严重信号偏移会导致车辆动力失控。分析推导了基于扭矩需求的从驾驶动力需求到目标节气门开度的完整转换过程,基于进气压力信号演算了发动机实际进气量。通过监测目标进气量与实际进气量之间的差异来识别动力失控工况,并利用Spike函数设计了识别算法和动力失控被识别后的故障管理策略。通过实车驾驶试验进行功能试验验证,结果表明:所提出的策略能够迅速、有效地识别动力失控工况,并主动采取干预措施避免危险驾驶状况的出现,同时提示驾驶者当前发动机处于危险工作状态。
[1]郝允志,孙冬野,秦大同,等.瞬态工况下无级变速车辆的功率补偿控制[J].湖南大学学报(自然科学版),2011,38(9):44-49.
[2]漆正刚.基于道路环境的无级变速车辆速比控制研究[D].重庆:重庆大学,2014:27-41.
[3]李卫兵,吴琼,彭忆强,等.电子节气门系统故障管理策略研究[J].车用发动机,2013(4):19-23.
[4]王明文,甘海云,唐岚.电子节气门故障自诊断系统的开发[J].车用发动机,2009(5):88-92.
[5]邢天亮.基于数据驱动的发动机状态监测和故障诊断[D].长春:吉林大学通信工程学院,2012:62-73.
[6]CONATSER R,WAGNER J.Diagnosis of automotive electronic throttle control systems[J].Control Engineering Practice,2004(12):23-30.
[7]MARK C,ROBRT S,MARIO M.An Architecture for E-lectronic Throttle Control Systems[C]//SAE Technical Paper.USA:[s.n.],2003.
[8]Matsumoto.Control apparatus of internal combustion engine equipped with electronic throttle control device[P].981074305,1998-1028.
[9]李晟,戴连奎.一种简单的在线拉曼光谱spike剔除方法[J].光散射学报,2013(4):188-194.
[10]赵金星,许敏,李明.Atkinson循环发动机人工神经网络模型的研究[J].汽车工程,2013,35(1):13-17.
