一种基于多级维纳滤波器的导航信号抗干扰自适应处理装置
2015-12-02张超李智潘长勇
张超++李智+潘长勇

摘 要: 为了提高导航系统抗干扰性能,设计一种基于多级维纳滤波器的导航信号抗干扰自适应处理装置。该装置通过将信号逐级投影到正交空间并滤波,避免了传统维纳滤波器中阻塞矩阵的求解,大大降低了算法复杂度,因此可以充分利用空时联合滤波方法进行抗干扰处理。基于Matlab仿真,提出一种简单高效的硬件实现方法。实验表明,该装置满足导航信号处理实时性的要求,对于来向变化较为缓慢的干扰信号有着很好的抑制效果,并且利于采用FPGA等硬件实现。
关键词: 卫星导航系统; 自适应抗干扰处理; 多级维纳滤波器; STAP
中图分类号: TN96?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0001?03
卫星导航系统在过去的几十年内得到了飞速发展,其在军事方面的作用已经无可替代,同时也在民用方面发挥巨大作用。然而导航卫星距离地球表面几万千米,导航信号接收机接收到的信号非常微弱,信噪比甚至只有-20 dB,很容易受到其他信号的干扰[1?2]。现阶段最有效的抗干扰技术莫过于空时联合抗干扰技术[3?4]。通过天线阵列和时域延时抽头,空时联合抗干扰技术大大增加了阵列自由度,能够形成更复杂的方向图,对更多的噪声产生抑制,拥有良好的抗干扰性能。然而,自由度的增加意味着复杂度的增加,比如采用维纳滤波时的阻塞矩阵求解,就会耗费大量资源。基于相关相减算法的多级维纳滤波器利用信号的逐级正交投影降维,恰好能够避免求解阻塞矩阵,从而实现空时联合抗干扰的快速滤波[5?7]。
1 算法原理
空时联合抗干扰技术采用M个阵元的天线阵列,并且在每一个阵元后设置N个延时抽头。这样理论上阵列能够处理T=M×N维的接收信号。将这T路信号乘以不同的权值并最终相加,得到系统滤波的输出结果。通过设置空时导向矢量,并求解接收信号的协方差矩阵,可以求得最优权矢量。然而以上方法中需要对接收信号的协方差矩阵进行求逆运算,对于维度为T的方阵,这样的运算复杂度非常高,难以用硬件快速实现以保证系统实时性。相关相减算法多级维纳滤波器(CSA?MWF)通过信号的逐级降维,大大降低了算法的复杂度。其结构如图1所示。其中,X(k)为输入的M维空时联合复信号,k为对应采样快拍数。本文中采用功率倒置算法,能够很好地处理干扰功率远大于目标信号功率的情况[8?9],取导向矢量a(θ0)=[1,0,…,0],则图1中:
2 硬件设计
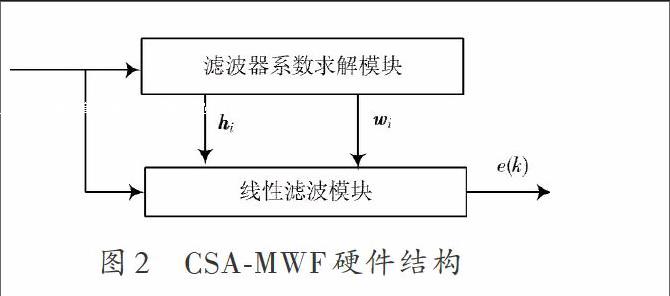
根据滤波器算法特点,在硬件设计方面,首先确定将装置分成两个硬件模块:滤波器系数求解模块和线性滤波模块,如图2所示。
在信号进入滤波器之前,首先需要进行希尔伯特变换产生复信号。
滤波器系数求解模块连续的接收训练序列,并利用设定长度的训练序列求解滤波器系数,包括图2中的hi和wi等。在求解完一组滤波器系数后,将其提供给线性滤波模块以更新滤波器系数,与此同时滤波器系数求解模块继续接收训练序列并进行下一组滤波器系数求解及更新。线性滤波模块利用滤波器系数求解模块更新的系数,连续地对输入信号进行线性滤波。当且仅当滤波器系数求解模块完成一组系数求解时,线性滤波模块更新其系数。并且,线性滤波模块的输出信号速率等于输入信号速率。
2.1 滤波器系数求解模块设计
滤波器系数求解模块周期性的接收训练序列并进行滤波器系数求解,最终更新线性滤波模块的滤波器系数。本文中采用满秩处理,即滤波器级数为r=M-1。
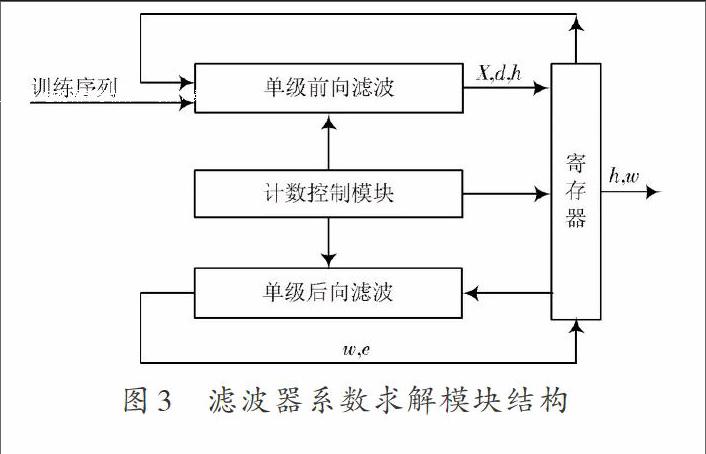
由图1可以看到,每一级求解模块硬件结构均相同,只有输入信号不同。所以可以设计单级滤波器硬件结构,配合寄存器及计数控制单元,将单级输出信号作为新一轮的输入信号,完成一种硬件的循环求解结构,如图3所示。
图3中,对于前向滤波,利用寄存器存储每一级的计算结果,然后作为新的输入进行下一级的求解;对于后向滤波也有相同结构。通过计数控制模块,记录当前求解级数及求解状态,并控制下一级的求解。通过这种硬件结构,不仅能够保存所有需要的滤波器系数,以供线性滤波模块更新,更能够节省很大的硬件逻辑资源,使得硬件结构更为简单高效。
2.2 线性滤波模块设计
线性滤波模块周期性的从滤波器系数求解模块更新滤波器系数,并按照信号输入速率输出滤波结果。在这种设计要求下,线性滤波模块不能利用单级循环结构完成滤波,而是必须设计出每一级的滤波器结构。但是,由于不需要对滤波器系数进行求解,每一级滤波只是简单的乘加,所以硬件结构仍然较为简单。其具体结构如图1所示,不同之处在于其周期性的更新滤波器系数,即h和w变量。
3 算法仿真
3.1 性能仿真
为了验证算法性能,本文利用Matlab生成的随机信号进行测试仿真。考虑到Y型阵列具有更好的波束成形性能[10],仿真采用4个阵元的Y型阵列,阵元间隔为半波长。
仿真中,利用随机序列产生3个宽带干扰信号,其来向角分别为:
[θ1=60°,φ1=-50°θ2=25°,φ2=-35°θ3=85°,φ3=-10°]
同时在接收信号中添加高斯噪声,并且设定干扰?噪声比(INR)为40 dB。考虑到通常期望的导航接收信号功率非常小,可以达到信噪比-20 dB左右,所以性能仿真时并未添加期望信号。取10 000个快拍数的信号块,并且取前200个快拍的信号作为滤波器系数训练序列,用来求解滤波器系数。经过仿真,得到阵列输入信号与滤波后输出信号功率比为42.515 1。可以看到,通过CSA?MWF后,接收信号功率大大降低,这就意味着信号中占主要功率比例的干扰信号得到了有效抑制。
图4位信号的功率谱密度,其中上曲线为输入信号功率谱密度,下曲线为输出信号功率谱密度。通过对比同样能够看到输出信号功率降低了40 dB左右。
图5为归一化后的阵列方向图。观察可以看到阵列方向图在干扰信号方向均形成了较深零陷,对接收信号中的干扰信号起到了有效的衰减。
3.2 定点仿真
在硬件编程实现该装置前,需要通过Matlab进行算法的定点仿真。定点仿真一方面可以观察将浮点数改为定点数后算法性能的下降情况,另一方面也能够通过观察数据大小进行硬件中变量位宽的设计,并进行合理的截位宽度选择。仿真中采用实采数据,包含3个宽带干扰信号,数据输入为16位有符号整数。考虑到算法流程中存在矩阵的乘加,所以将信号输入及中间变量扩大到18位,并且对所有中间变量进行高位截位(即截取最高几位,绝对值超过最大值的用截位后最大值表示)。同时,针对硬件无法较快完成的除法操作,建立18位除法索引表,通过查表的方式,牺牲内存资源,用乘法代替除法。除此之外,对算法流程中其他的细节同样进行定点设计,并进行适当截位。取10组数据进行定点仿真,其中每组数据快拍数为2 041,训练序列块排数为256。分别仿真定点与非定点情况,并观察滤波前信号与滤波后信号的功率比。表1为定点仿真结果。
可以看到,定点仿真后算法性能几乎没有下降,相比于浮点仿真,定点仿真结果仅降低0.1 dB以下。定点仿真为硬件结构的代码实现提供了保障。硬件代码最终将能够真实反映定点仿真的结果。
4 结 语
本文提供了一种基于相关减法多级维纳滤波器的导航信号抗干扰自适应处理装置,并通过原理介绍、算法仿真以及最终的硬件结构设计给出了具体分析及实现方案。可以看到,本文所述装置不仅充分利用了空时联合滤波技术的优点,对方向变化缓慢的噪声有很好的抑制作用,同时也能够避免较高的算法复杂度,保障装置的实时性。不仅如此,利用单级硬件结构配合寄存器实现循环求解滤波器系数,也能够节省一部分硬件资源。综上,本文所述装置是一种性能较好的导航信号抗干扰自适应装置。
参考文献
[1] 吕小平,李欣,秦智.二代卫星导航系统与民航卫星导航应用[J].中国航天,2010(4):8?12.
[2] 韩晓飞,马绪瀛.北斗卫星导航系统定位性能评估[J].工程勘察,2015(4):83?87.
[3] 乐四海,杨睿峰,李保东.联合空时滤波算法在接收机抗干扰中的应用[J].现代导航,2013(1):1?4.
[4] 孙英.机载雷达空时自适应处理技术研究[D].南京:南京邮电大学,2013.
[5] 秦明峰,范广伟.卫星导航干扰功率快速估计技术研究[C]//第五届中国卫星导航学术年会论文集.北京:中国卫星导航学术年会组委会,2014:214?216.
[6] 杨阳,文晓聪,李立欣.一种基于多级维纳滤波的改进空时抗干扰算法[J].计算机系统应用,2014(1):78?85.
[7] 李磊,李国林,路翠华.采用降秩多级维纳滤波器的二维DOA估计快速算法[J].电讯技术,2014(3):278?282.
[8] 曹有权.基于北斗卫星导航系统的功率倒置算法仿真研究[J].科技视界,2013(5):69?70.
[9] 吕翠改,成传湘.基于RLS与LMS算法的功率倒置阵列性能评估[J].西安邮电大学学报,2013(1):46?49.
[10] 鲁祖坤,石宇,吉民.基于Y型阵列的幅相误差校正算法研究[J].通信对抗,2012(4):9?12.
