五棱镜转动时出射光角度的变化
2015-11-26张晓辉谷立山
袁 理,张晓辉,韩 冰,谷立山,张 鹰
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院大学,北京100049)
1 引言
五棱镜具有使入射光在主截面内偏转90°的光学特性,是常用的光学元件。五棱镜可以用于测试大口径平面镜的面形轮廓[1-7],其过程为:高精度测角仪发出的光经五棱镜偏转90°后入射到平面镜,经平面镜反射后再经过五棱镜返回到测角仪,测角仪测出返回光的角度,即可计算出平面镜上该点的表面倾角,当五棱镜沿导轨扫描时,可以得到平面镜表面多个点的倾角,再通过一定的算法即可得到平面镜的面形轮廓。但是由于导轨存在一定的制造误差,使得五棱镜在扫描过程中发生倾斜,即产生转动。当入射光不变时,五棱镜的转动会改变出射光的角度,使光的方向偏离了理论方向,从而降低了表面倾角以及平面镜面形的测试精度。因此,有必要研究五棱镜转动时出射光角度的变化,以便进行误差分析和修正。闫亚东[8]等人利用Zemax软件对入射光和五棱镜的转动进行模拟仿真,然后由Zemax直接给出五棱镜转动后的出射光角度变化,但是这种方法缺乏理论分析和计算。常山[9]等人利用棱镜转动定理计算了五棱镜转动后出射光角度的变化,但是由于棱镜转动定理的公式只是一个近似公式,所以最后的计算结果并不精确。于丽娜[10]将五棱镜简化为平面镜系统,利用平面镜的反射作用矩阵和反射转动公式来计算五棱镜转动后的出射光角度变化,但由于没有考虑五棱镜的折射作用,其结果也只是近似值。朱硕[11]和戚二辉[12]等人首先求出五棱镜转动后各个表面的法线矢量,然后再利用矢量形式的折射定律和反射定律,采用光线追迹的方法来计算五棱镜转动后的出射光角度变化,但是计算十分繁琐,计算量很大,并且仅仅考虑了垂直入射的情况。
由于前述的各种方法都有不足之处,所以本文提出了一种新的方法来计算五棱镜转动时出射光角度的变化,它具有如下优点:(1)可以得到精确的结果,而不是只能得到近似值;(2)计算方法具有普遍性,既可以用于垂直入射的情况,也可以用于非垂直入射的情况;(3)计算简便,计算量小;(4)用偏摆角和俯仰角来表征入射光和出射光,而不是采用方向角来表征,便于分析和实验测量。
2 出射光角度变化的计算过程
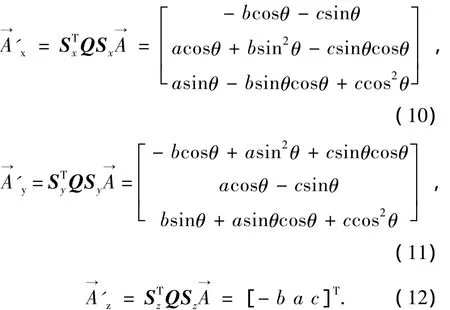
2.1 坐标系的建立和角度的正负规定
如图1,建立右手坐标系xyz,使得z轴垂直于五棱镜的主截面,x轴和y轴分别垂直于光的入射面和出射面。我们主要研究入射光和出射光的偏摆角和俯仰角,偏摆角是指光在主截面内的偏角,俯仰角是指光在垂直于主截面方向的偏角。
下面对各个角度的正负进行规定。对于入射光向量,当其y分量为正时,偏摆角为正;当其z分量为正时,俯仰角为正。对于出射光向量,当其x分量为正时,偏摆角为正;当其z分量为正时,俯仰角为正。对于转动角度,以按右手规则确定的方向为正。
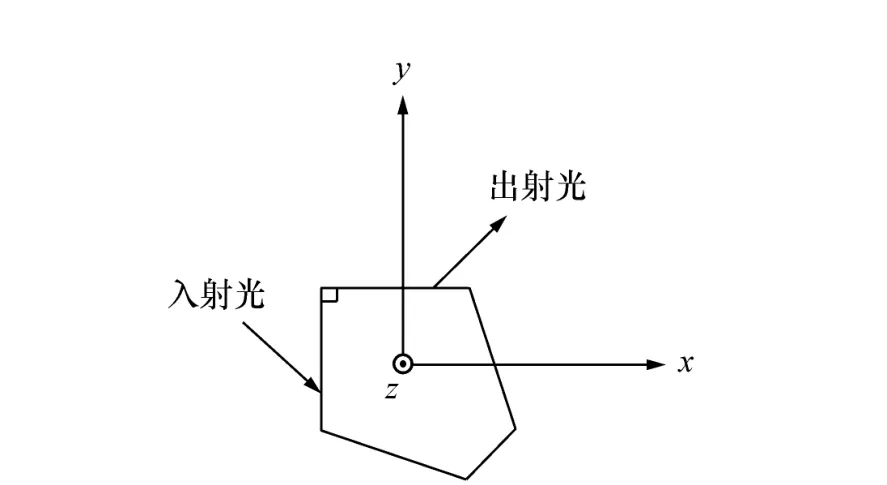
图1 五棱镜的坐标系Fig.1 Coordinate system of pentaprism
2.2 求入射光向量
按照图1,假设入射光从左方入射,其偏摆角ε和俯仰角 η已知。设入射光向量为[a b c]T,再由图2,可以得到:

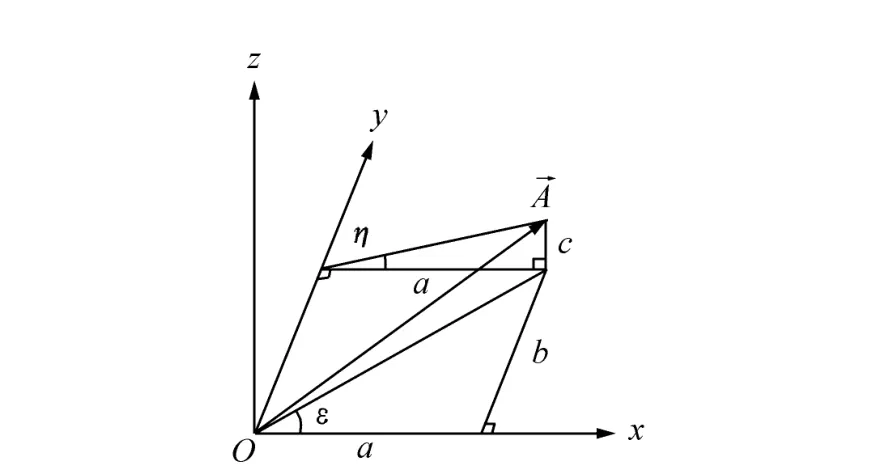
图2 入射光的 ε、η 与a、b、c的关系Fig.2 Relation between ε,η and a,b,c for input lignt
因为光从左方入射,所以其x方向的分量a一定大于零,可以设a=1,于是得到:
2.3 五棱镜的作用矩阵和坐标转换矩阵
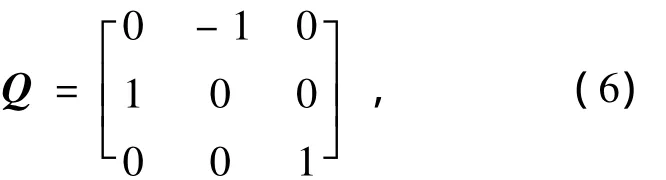
按照图1,当光从左方入射时,五棱镜对入射光的作用,实际上就是使入射光绕z轴旋转90°,这种作用用矩阵表示为[13-15]:
设有一个定坐标系 xyz和一个动坐标系x1y1z1,它们在初始时重合,然后定坐标系xyz不动,动坐标系x1y1z1绕x轴转动θ角。设同一个向量在定坐标系xyz中记为,在转动后的动坐标系x1y1z1中记为,其中Sx称为由定坐标到动坐标的转换矩阵,它等于[15-17]:
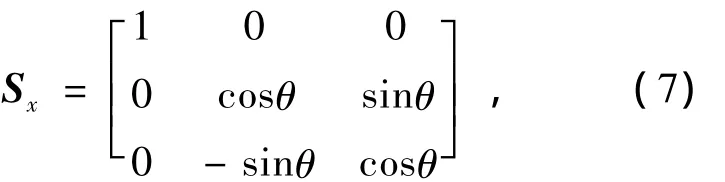
如果动坐标系x1y1z1是绕y轴或者z轴转动θ角,则转换矩阵分别为:
因为Sx是一个正交矩阵,有,所以有也有相同性质。称为由动坐标到定坐标的转换矩阵。
2.4 求五棱镜转动后的出射光向量
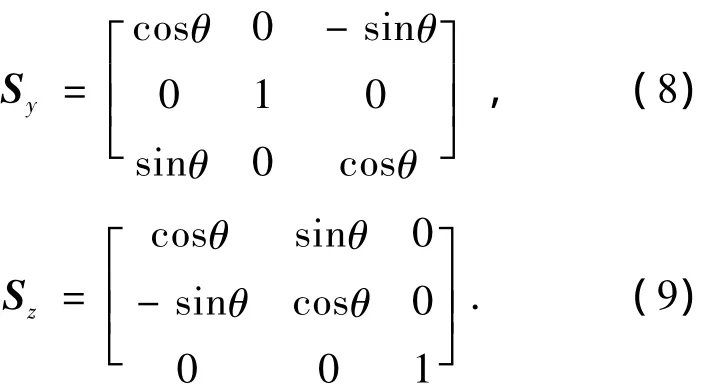
设xyz坐标系为定坐标系,并且假设存在一个动坐标系,它在初始时与xyz坐标系重合,然后随五棱镜一起转动。当五棱镜绕x轴转动θ时,首先将左乘 Sx,把的定坐标转换为动坐标,再左乘Q,得到经过五棱镜后的出射光向量的动坐标,再左乘,将出射光向量的动坐标转化为定坐标,即为。当五棱镜绕y轴和z轴转动θ角时,也有同样的过程。于是得到出射光向量的最终表达式为:
2.5 求出射光的偏摆角和俯仰角的变化

即:
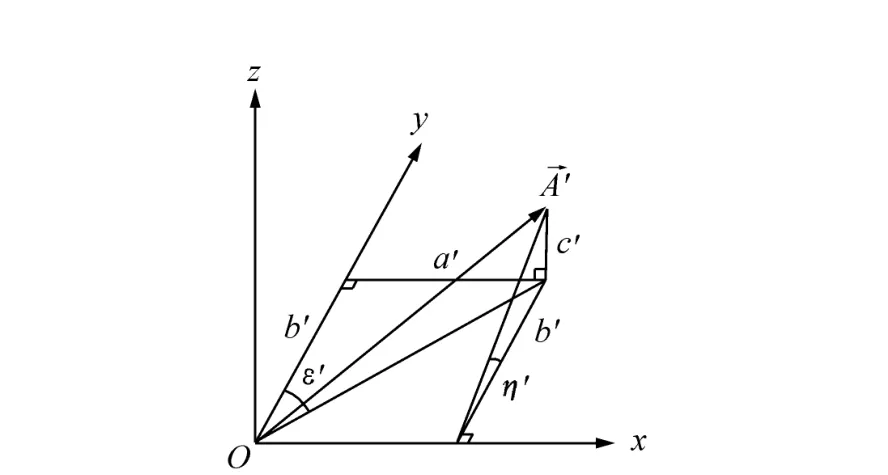
图 3 出射光的 ε'、η'与 a'、b'、c' 的关系Fig.3 Relation between ε',η'and a',b',c'for output lignt


于是得到五棱镜在转动时,出射光的偏摆角和俯仰角的变化量为:

综上,由入射光的偏摆角ε和俯仰角η以及五棱镜绕某个坐标轴的转角θ,就可以精确计算出五棱镜转动时出射光的偏摆角和俯仰角的变化量Δε'和Δη',总结一下整个过程如下:
(1)按式(3)、(4)、(5)计算入射光向量的三分量 a、b、c。
(2)当五棱镜分别绕x轴、y轴、z轴转动θ时,分别按式(10)、(11)、(12)计算出射光向量的三个分量 a'、b'、c'。然后按式(15)、(16)计算出射光的偏摆角ε'和俯仰角η'。
(3)按式(18)、(19)计算五棱镜没有发生转动时出射光的偏摆角ε'0和俯仰角η'0。
(4)按(20)、(21)式计算出射光的偏摆角和俯仰角的变化量 Δε'和 Δη'。
另外,将(12)式和(17)式作比较,可见两者是一样的,即当五棱镜绕z轴转动时,出射光向量不发生变化。因此,当五棱镜绕z轴转动时,不管入射光的偏摆角ε和俯仰角η以及五棱镜的转角θ是多少,出射光的偏摆角和俯仰角的变化量Δε'和 Δη'都等于0。
3 垂直入射的情况
下面分析一种特殊情况,即入射光垂直入射五棱镜的情况,此时有ε=η=0,于是得到a=1,b=c=0,进一步可得到出射光向量为:
由(18)、(19)式可知,ε'0= η'0=0,再由式(20)、(21)得到 Δε'= ε',Δη'= η'。然后再由式(15)、(16)得到出射光的角度变化量为:
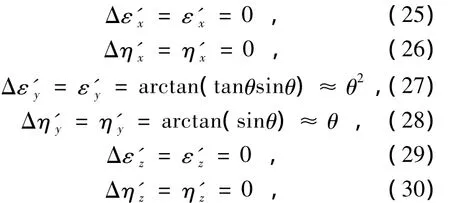
式中,x、y、z下标分别表示五棱镜绕 x轴、y轴、z轴转动后的结果。“≈”号在θ很小时成立,单位必须为弧度,此时有:

所以,按照图1,在光从左方垂直入射时,当五棱镜分别绕x轴、y轴、z轴转动θ角时,出射光的偏摆角变化量分别为 0、arctan(tanθsinθ)、0,俯仰角变化量分别为 θ、arctan(sinθ)、0;当 θ很小时,偏摆角变化量分别为 0、θ2、0,俯仰角变化量分别为 θ、θ、0。
4 五棱镜多次转动的情况
前面分析的是单次转动的情况,然而五棱镜也可能作多次转动,此时同样可以精确计算出射光角度的变化量Δε'和Δη',与单次转动的计算相比,唯一不同的是计算出射光向量的这一步,而其它计算过程完全一样。假设五棱镜作了3次转动,第1次是绕y轴转动,定坐标系为xyz,转动后的动坐标系设为x1y1z1;第2次是绕x1轴转动,此时定坐标系为x1y1z1,转动后的动坐标系设为x2y2z2;第3次是绕z2轴转动,此时定坐标系为x2y2z2,转动后的动坐标系设为x3y3z3。可见,第1次转动的动坐标就是第2次转动的定坐标,第2次转动的动坐标就是第3次转动的定坐标,利用计算单次转动的思想方法,容易得到出射光向量为:

继而就可以计算出Δε'和Δη'。当五棱镜作其它次数转动时,计算方法也与此类似。
后面的实际计算和实验仅针对单次转动进行,因为多次转动的种类是无限的,无法一一分析,而单次转动是多次转动的基础。
5 计算结果
按照前述公式,编程对五棱镜转动时出射光的偏摆角和俯仰角的变化量Δε'和Δη'进行了计算,表1、表2分别给出了五棱镜绕x轴、y轴转动时Δε'和Δη'的计算数据,结果保留到秒;而当五棱镜绕z轴转动时,由于Δε'和Δη'的计算值恒等于0,所以无须再列表显示。在表1、表2中,第一行的数据是入射光的角度,括号内的2个数据依次是入射光的偏摆角ε和俯仰角η;第一列的数据是五棱镜的转角θ;其它数据为出射光的角度变化量,括号内的2个数据依次是出射光偏摆角的变化量Δε'和俯仰角的变化量Δη'。图4、图5、图6分别画出了Δε'随θ、ε和η的变化趋势。

表1 五棱镜绕x轴转动时出射光角度的变化量(计算值)Tab.1 Changes of output light's angles when pentaprism rotates around x axis(from calculation)

表2 五棱镜绕y轴转动时出射光角度的变化量(计算值)Tab.2 Changes of output light's angles when pentaprism rotates around y axis(from calculation)
在下面的分析中,只看数据的绝对值,而不关心数据的正负。我们可以看出以下规律:
(1)由表1和表2可见,Δε'是一个小量,而Δη'与 θ近似相等,并且远大于 Δε'。所以,当五棱镜产生转动误差时,出射光的偏摆角(主截面内的偏角)受到的影响很小,而出射光的俯仰角(垂直于主截面方向的偏角)则受到较大影响。因此,在使用五棱镜时,为了减小转动误差的影响,通常只把出射光的偏摆角作为有效数据,而出射光的俯仰角则被视为无效数据而弃用。所以,在后面的分析中,只对有效数据Δε'进行分析,而不再关心无效数据Δη'。
(2)由图4可见,当θ增大时,Δε'也增大。所以,五棱镜的转角误差越大,出射光偏摆角的变化量也越大。因此,要尽量减小五棱镜的转角误差。
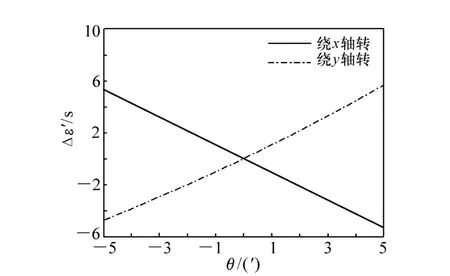
图4 Δε'随 θ的变化(ε=30',η=60')Fig.4 Changes of Δε'with θ(ε =30',η =60')
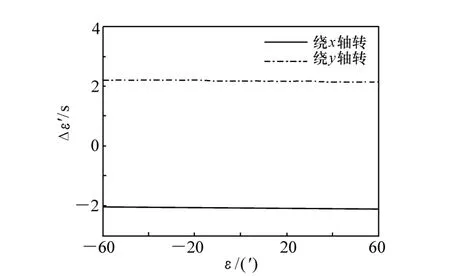
图5 Δε'随 ε的变化(η=60',θ=2')Fig.5 Changes of Δε'with ε(η =60',θ=2')
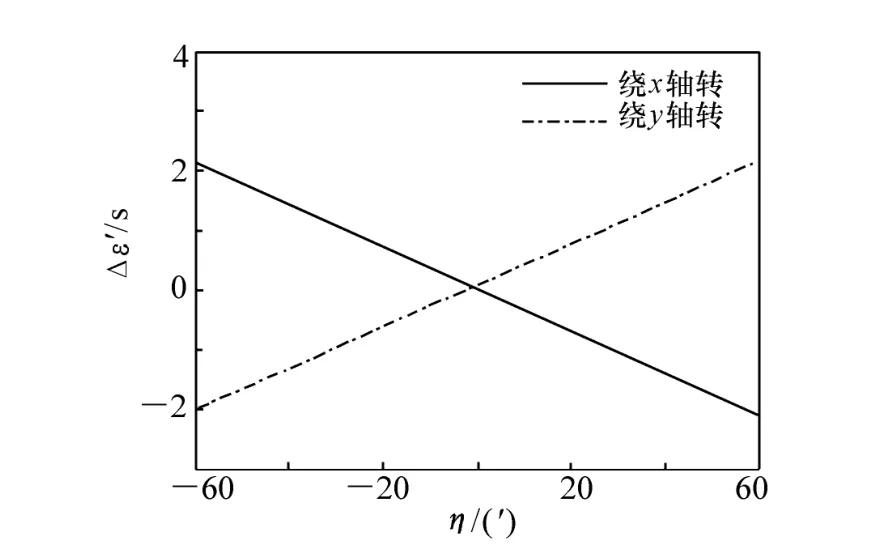
图6 Δε'随 η 的变化(ε=30',θ=2')Fig.6 changes of Δε'with η(ε =30',θ=2')
(3)由图5可见,当只有ε变化时,Δε'几乎不变;由图6可见,当只有η变化时,Δε'改变,并且Δε'随着η的增大而增大。所以,当五棱镜产生转动误差时,入射光偏摆角的大小对出射光偏摆角的变化量几乎没有影响,而入射光俯仰角的大小与出射光偏摆角的变化量成正相关。因此,在使用五棱镜时,为了减小转动误差的影响,要让入射光的俯仰角尽量地小,而对入射光的偏摆角可以不作严格要求。
6 实验
实验装置如图7所示,五棱镜和两块平面反射镜A、B固定在三维旋转台上一起转动,经纬仪1发出的平行光在五棱镜的入射面上一部分反射后用于控制入射角度,一部分通过五棱镜后进入经纬仪2。当五棱镜转动时,经纬仪2可测出出射光的角度变化量。经纬仪3通过与平面镜A自准来控制五棱镜绕y轴和z轴的转角大小,经纬仪4通过与平面镜B自准来控制五棱镜绕x轴的转角大小。使用的经纬仪的精度为1″。
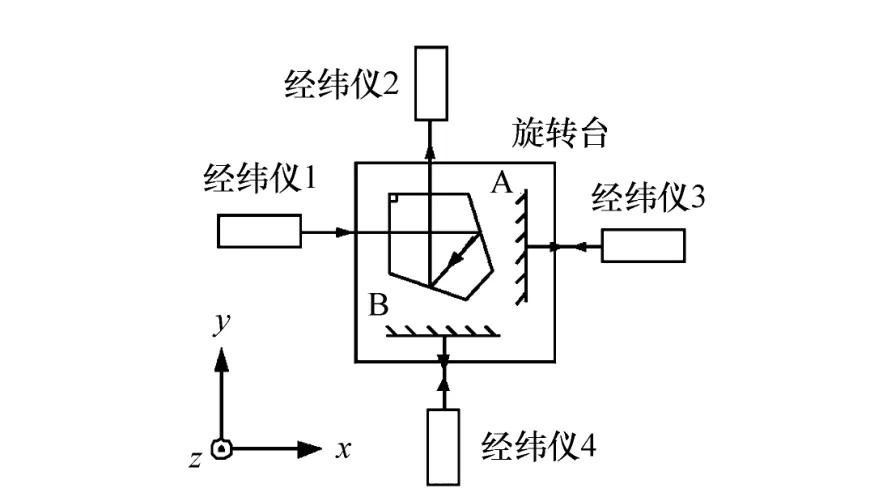
图7 实验装置Fig.7 Experimental devices
表3、表4、表5分别给出了五棱镜绕 x轴、y轴和z轴转动时出射光的角度变化量的实验数据。表3、表4、表5与表1、表2的结构相同,第一行的数据是入射光的角度,第一列的数据是五棱镜的转角,其它数据为出射光的角度变化量。

表3 五棱镜绕x轴转动时出射光角度的变化量(实验值)Tab.3 Changes of output light's angles when pentaprism rotates around x axis(from experiment)

表4 五棱镜绕y轴转动时出射光角度的变化量(实验值)Tab.4 Changes of output light's angles when pentaprism rotates around y axis(from experiment)

表5 五棱镜绕z轴转动时出射光角度的变化量(实验值)Tab.5 Changes of output light's angles when pentaprism rotates around z axis(from experiment)
将表3与表1,表4与表2分别进行比较可知,计算值与实验值的最大偏差为1″。当五棱镜绕z轴转动时,出射光角度变化量的计算值均为0″,与表5比较可知,计算值与实验值的最大偏差也为1″。可见,计算值与实验值的偏差在实验精度范围内,证明计算方法正确。
7 结论
本文对五棱镜转动时出射光角度的变化进行了分析与精确计算。首先建立了坐标系并规定了角度的正负,再由入射光的偏摆角和俯仰角计算入射光向量,接着以五棱镜的作用矩阵与坐标转换矩阵为基础计算出射光向量及其偏摆角和俯仰角,然后计算当五棱镜没有转动时出射光的偏摆角和俯仰角,最后计算出射光偏摆角和俯仰角的变化。特别对垂直入射的特殊情况进行了分析。随后进行了实际计算与实验,总结了出射光角度变化的一些规律,并将计算数据与实验数据进行了比较,结果最大偏差为1″,在实验精度范围内,证明了计算方法是正确的。
实际使用五棱镜时,利用入射光的偏摆角和俯仰角以及五棱镜绕某个坐标轴的转动误差角,就可以计算出射光的角度变化量,在实际出射光的角度中减去该变化量,即可对五棱镜转动误差的影响进行修正。
[1] 汤兆鑫,黄玮,许伟才,等.差分五棱镜扫描法在波前检测中的应用[J].中国光学,2014,7(6):1003-1011.TANG ZH X,HUANG W,XU W C,et al..Application of differential pentaprism scanning in wavefront detection[J].Chinese Optics,2014,7(6):1003-1011.(in Chinese)
[2] 戚二辉,罗霄,郑立功,等.大口径非圆形光学平面的五棱镜扫描检测技术研究[J].光电子·激光,2014,25(7):1370-1375.QI E H,LUO X,ZHENG L G,et al..Optical testing of large optical flat mirror with non-circular pupil based on scanning pentaprism technology[J].J.Optoelectronics·Laser,2014,25(7):1370-1375.(in Chinese)
[3] 师途,杨甬英,张磊,等.非球面光学元件的面形检测技术[J].中国光学,2014,7(1):26-46.SHI T,YANG Y Y,ZHANG L,et al..Surface testing methods of aspheric optical elements[J].Chinese Optics,2014,7(1):26-46.(in Chinese)
[4] 张峰.纳米级面形精度光学平面镜加工[J].中国光学,2014,7(4):616-621.ZHANG F.Fabrication of optical flat mirror with nanometer surface error[J].Chinese Optics,2014,7(4):616-621.(in Chinese)
[5] 朱硕,张晓辉.误差分离技术在平面镜瑞奇-康芒法检测中的应用[J].光学 精密工程,2014,22(1):7-12.ZHU SH,ZHANG X H.Application of error detaching to Ritchey-Common test for flat mirrors[J].Opt.Precision Eng.,2014,22(1):7-12.(in Chinese)
[6] 马鑫雪,王建立.利用相位差异法检测镜面面形[J].光学 精密工程,2015,23(4):975-981.MA X X,WANG J L.Surface testing with phase diversity method[J].Opt.Precision Eng.,2015,23(4):975-981.(in Chinese)
[7] 张敏,隋永新,杨怀江.用于子孔径拼接干涉系统的机械误差补偿算法[J].光学 精密工程,2015,23(4):934-940.ZHANG M,SUI Y X,YANG H J.Mechanical error compensation algorithm for subaperture stitching interferometry[J].Opt.Precision Eng.,2015,23(4):934-940.(in Chinese)
[8] 闫亚东,何俊华,仓玉萍,等.用ZEMAX模拟五棱镜误差对平行度检测的影响[J].应用光学,2007,28(5):649-653.YAN Y D,HE J H,CANG Y P,et al..Effect of penta prism error on parallelism detection[J].J.Applied Optics,2007,28(5):649-653.(in Chinese)
[9] 常山,曹益平,陈永权.五棱镜的运动误差对波前测量的影响[J].光学仪器,2005,27(3):12-16.CHANG SH,CAO Y P,CHEN Y Q.Kinematic error effect of pentagonal prism on wavefront measurement[J].Optical Instruments,2005,27(3):12-16.(in Chinese)
[10] 于丽娜.基于五棱镜扫描法的大口径光学准直系统出射波前的检测[D].南京:南京理工大学,2008.YU L N.Measurement of the wavefront of a large aperture optical collimation system using a scanning pentaprism[D].Nanjing:Nanjing University of Science and Technology,2008.(in Chinese)
[11] 朱硕.大口径光学平面镜面形检测技术研究[D].北京:中国科学院大学,2014.ZHU SH.Study on technology for large optic flat mirror testing[D].Beijing:University of Chinese Academy of Sciences,2014.(in Chinese)
[12] 戚二辉,罗霄,李明,等.五棱镜扫描技术检测大口径平面镜的误差分析[J].红外与激光工程,2015,44(2):639-646.QI E H,LUO X,LI M,et al..Error analysis of scanning pentaprism system in optical testing on large aperture flat mirror[J].Infrared and Laser Engineering ,2015,44(2):639-646.(in Chinese)
[13] 匡萃方,冯其波,刘斌,等.五角棱镜制造角差及抖动对其转向角的影响[J].光学技术,2004,30(5):616-622.KUANG C F,FENG Q B,LIU B,et al..Influences on the deflection angle of the pentagonal prism due to dithering and fabrication angles error[J].Optical Technique,2004,30(5):616-622.(in Chinese)
[14] 王武,洪普,王波.二维扫描镜像旋特性分析[J].光学与光电技术,2015,13(2):82-86.WANG W,HONG P,WANG B.Characteristic analysis of two-dimensional scanning mirror rotating[J].Optics& Optoelectronic Technology,2015,13(2):82-86.(in Chinese)
[15] 连铜淑.棱镜调整[M].北京:国防工业出版社,1978.LIAN T SH.Prisms Adjustment[M].Beijing:National Defense Industry Press,1978.(in Chinese)
[16] 何凯,陈星,王建新.高精度激光三角位移测量系统误差分析[J].光学与光电技术,2013,11(3):62-66.HE K,CHEN X,WANG J X.Analysis of error in high precision laser triangulation displacement measurement system[J].Optics & Optoelectronic Technology,2013,11(3):62-66.(in Chinese)
[17] 代贞强,李大海,杨丽杰.基于光线角度标定的坐标测量方法[J].光学与光电技术,2015,13(3):29-33.DAI ZH Q,LI D H,YANG L J.Coordinate measuring method based on the angel calibration of ray[J].Optics& Optoelectronic Technology,2015,13(3):29-33.(in Chinese)
