导弹发射姿态测量方法研究
2015-11-26王志乾乔彦峰殷延鹤
张 原,王志乾,乔彦峰* ,罗 君,殷延鹤
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院大学,北京100049)
1 引言
高速摄像能够提供高动态目标运动与姿态变化的大量细节信息,分析其所记录的图像可以得到目标的动态运动参数,广泛地应用于高精度运动目标测量领域。在导弹试验中,采用多站交会测量方式,利用高速摄像机近距离高速拍摄导弹发射的序列图像,通过分析这些图像,获得导弹发射轨迹的重要参数,是分析导弹飞行状态的重要手段[1-4]。近距离凝视光学姿态测量主要有2种测量方法,斜瞄和平瞄测量。斜瞄测量时,高速摄像机以倾斜一定角度方式进行方位、俯仰和图像测量;平瞄测量时,高速摄像机的俯仰方向始终为0°,对导弹进行方位、俯仰和图像测量。为更好地发挥不同高速摄像机在导弹发射测量中的作用,必须对这两种方法进行仔细研究。
两种姿态测量方法,均采用近距离双站交会方法测量导弹的飞行姿态,其处理过程,可分为摄像机标定、目标指向拍摄、图像摄录、目标匹配、姿态处理等环节[5-6],两种姿态测量方法在测量环节上有所不同,各个环节的测量结果都将直接影响最终测量精度。本文对高速摄像姿态测量系统的关键技术进行分析,论述斜瞄和平瞄测量方法的测量过程,仿真分析两种测量方法在相同环境下的测量精度,给出其适用的姿态测量状态,同时,采用先进行误差综合再计算姿态测量精度的方法对上述精度分析结果进行验证。
2 测量原理与数学模型
2.1 测量原理
斜瞄和平瞄姿态测量方法原理相同,对于导弹的姿态测量都可以通过求解它中轴线的方法获得[6-9],如图1 所示。
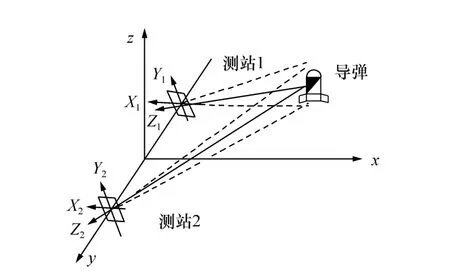
图1 导弹姿态测量原理Fig.1 Principle of missile attitude measurement
导弹可以看成是相对其中轴线几何对称的刚体,导弹飞行过程中的俯仰角和方位角也是相对于导弹中轴线定义的。在对导弹进行姿态测量时,至少采用2台高速摄像机布设在导弹可能的飞行航路两侧,导弹飞过高速摄像机视场时,高速摄像机捕获拍摄导弹,将获得的导弹视频信号转换为全数字信号进行图像处理,提取出目标像中轴线上的特征点在高速摄像机像面坐标系的坐标,应用这些坐标,结合焦距、高速摄像机的坐标原点分别求出对应的平面方程,进而得到导弹轴线在空间的姿态。
2.2 数学模型

图2 交会测量系统数学模型Fig.2 Mathematical model of interaction measurement system
如图2所示,两台高速摄像机分别布置在导弹飞行航路两侧的测站1、测站2,其位置坐标由大地测量标定,调节高速摄像机俯仰及方位角度使得测量系统瞄准目标飞行航路的指定点上,记录角度数据,同时对目标影像数据进行采集。最后,结合目标点及影像数据进行处理,最终得到测量参数数据。设0c-xcyczc为测量系统地理地平坐标系,(01,x1,y1,z1)、(02,x2,y2,z2)分别以高速摄像机1、2的光心01、02为原点建立的测量坐标系。地理地平坐标系的xc轴指向真北,zc轴垂直向上,yc轴与xc、zc轴构成右手坐标系。测量坐标系1、2的坐标轴取向与地理地平坐标系一致,原点分别位于yc轴上,相对于地理地平坐标原点对称,且测量坐标系1、2原点相距2L。AB为导弹的中轴线,A1B1、A2B2分别为其在两台高速摄像机成像平面所成的像。光心01与A1B1构成的平面π1,光心 02与 A2B2构成的平面 π2。
第i台高速摄像机的像面坐标系下:

式中,i=1,2,(xAi,yAi)、(xBi,yBi),fi分别为导弹中轴线矢量的两个端点在测站1、2像面上的坐标和光学系统的焦距,(xi0,yi0,zi0)为测站在地理地平坐标系的原点坐标。

式中,Ai、Ei分别是第i测站高速摄像机的方位角和俯仰角,2L为两测站的距离。
由式(4)可以确定由光心01与A1B1构成的平面π1、光心02与A2B2构成的平面π2的平面构成的直线方程;

式(5)即为导弹中轴线AB在空间的直线方程,其方向向量(l,m,n):

3 试验分析
为验证方法的可行性,在相同的试验参数条件下,采取应用单项误差分别仿真计算姿态测量精度再综合和先综合测角精度再计算姿态测量精度两种方法验证双站交会姿态测量精度,然后比较平瞄和斜瞄姿态测量方法。
3.1 试验参数
结合典型导弹参数[10],设定:导弹长8 m,直径400 mm,初速度17 m/s,导弹起飞段0~20 m给出5组典型姿态数据,导弹飞行航路均在斜瞄和平瞄高速摄像机视场内。导弹起飞段测量,高速摄像机1、2的光心坐标系位置分别为(0 m,-500 m,0 m)、(0 m,500 m,0 m),导弹发射点位于(350 m,0 m,0 m)。两台高速摄像机交会角在60°~120°之间。
高速摄像机主要参数:探测器 V640型,2 560 pixel×1 600 pixel,像元尺寸 10 μm,焦距150 mm,拍摄帧频340 frame/s,事后判读精度0.5 pixel。轴角编码器为24 bit绝对轴角式光电编码器。
3.2 精度分析
为验证测量精度采用两种计算方法进行分析。
(1)方法1:用单项测角误差分别计算姿态测量精度再综合
主要测量误差项包括,测量站竖轴差、轴角编码器误差、横轴差、照准差、零位差、中轴线斜率提取误差、中轴线截距提取误差、焦距测量误差、交会测量系统基线长度误差等误差项[11],误差项取值见表1。
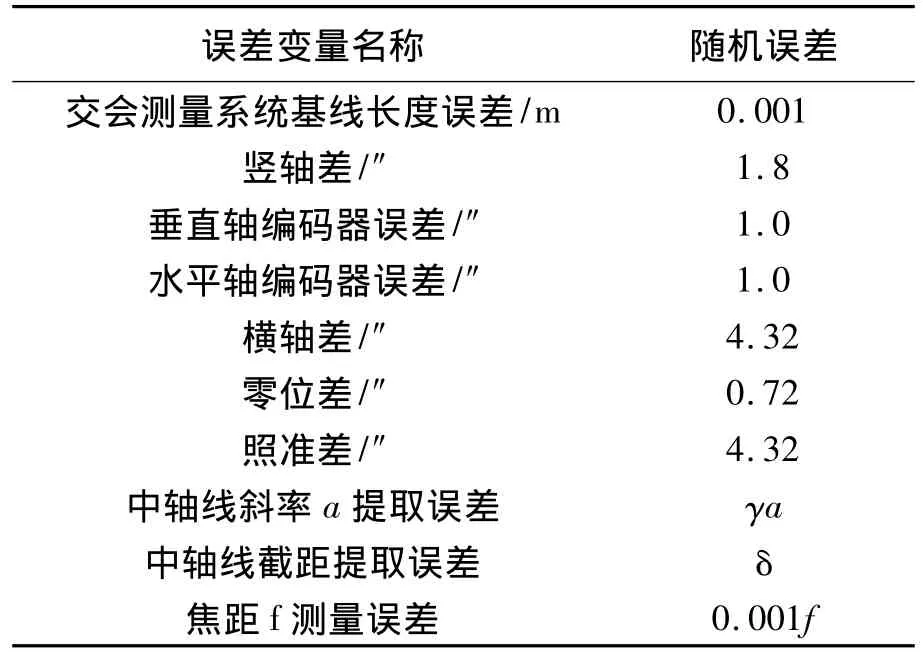
表1 误差项取值Tab.1 Error term value
在这些误差项中,与CCD分辨率密切相关的是导弹投影在摄像机像面坐标系下的中轴线斜率a提取误差系数γ和中轴线截距提取误差δ。对于测站1摄像机:

式中,(xA1,yA1)、(xB1,yB1)分别为导弹头、尾在摄像机像面坐标系下的坐标。
中轴线截距,对位于测站1摄像机:

同理可以计算测站2对应参数。
当事后判读误差 0.5 pixel时,像元尺寸10 μm,坐标判读误差 5 μm,将其作为标准差应用式(1)~(4)、(8)、(9),仿真计算在发射段0~20 m距离范围内,中轴线斜率a误差系数γ随导弹弹道x轴坐标xc1变化范围如图3所示,均方值小于0.005;中轴线截距误差δ变化范围如图4所示,均方值小于18.99 μm。
结合试验参数,假设表1中所列误差项相互独立,应用数学模型式(1)~(7),逐项仿真计算表1中所列误差项引起的俯仰角φ、方位角θ测量误差,然后综合一次测量的方位角、俯仰角总误差 σφ、σθ:


图3 中轴线斜率a误差系数γ变化曲线Fig.3 Change curve of slope standard deviation γ of middle axes

图4 中轴线截距误差δ变化曲线Fig.4 Change curve of intercept standard deviation δ of middle axes

(2)方法2:先综合测角误差再计算姿态测量精度
为验证方法1测量精度计算结果的正确性,采用先综合高速摄像机测角误差,计算定位误差,

表2 静态测量误差Tab.2 Static measurement error
再计算姿态测量精度。
创业教育的概念也有狭义和广义之分。狭义的创业教育是指培养创业应具备的基本素质和技能,即“企业家速成班”;广义的创业则是提升人的创新能力,将教育的对象扩展到每一个学生,使其成为具备创业素质和潜力的复合型人才。此处的“广义”不仅体现在受教育群体规模的扩大,更注重创业素质内涵的丰富,其核心是“创新精神”[4]。
高速摄像机在导弹发射段工作仰角在0°~10°之间,综合考虑轴系误差、编码器误差,计算跟踪架静态测角误差,见表2。
当对目标成像在传感器CCD靶面上图像进行处理时将产生误差,主要包括像元分辨率误差、图像处理误差,见表3。

表3 图像处理误差Tab.3 Image processing error

表4 高速摄像机综合测角误差Tab.4 Compositive angle measurement error ofhigh speed videos
高速摄像机的综合测角误差:方位测量误差为16.59″,俯仰测量误差为15.99″。结合试验参数,代入经纬仪双站交会误差计算模型(12)、(13)、(14),计算其对导弹的定位误差 σx,σy,
高速摄像机观测数据对弹道参数xci,yci,zci偏导数的雅克比矩阵H为:

假设2台高速摄像机相对于导弹的观测参数Aci、Eci的随机误差互不相关,协方差记为:

协方差矩阵为:

将 σx,σy,σz误差值作为高速摄像机对导弹定位标准差,采用蒙特卡洛方法,应用数学模型式(16),仿真计算俯仰角φ、方位角θ测量误差,见表5中方法2栏。
姿态角计算模型:

3.3 比较分析
为便于进行精度比较分析,将导弹起飞过程中姿态测量范围均限制在斜瞄和平瞄姿态测量高速摄像机的视场内。从表5中可以看出,用斜瞄和平瞄姿态测量方法获得的导弹中轴线方位角、俯仰角,其测量值和设定值之间有误差,两种方法测量精度相近。
用单项测角误差分别计算姿态测量精度再综合(方法1)与用综合测角误差计算定位误差、再计算姿态测量精度(方法2)进行分析计算,两种方法计算的姿态角精度相近。
从表5还可以看出,导弹中轴线俯仰角增大时,测量结果与设定值相比,俯仰、方位误差增大。这是在仿真试验中,高速摄像机近距离布设在导弹飞行航线两侧,俯仰角小时导弹成像在图像坐标系的x、z两个方向较宽,导弹中轴线头尾坐标可以较好区分;仰角大时,导弹成像在图像坐标系的x、z两个方向较窄,导弹中轴线头尾坐标区分度下降,导致姿态角测量值与设定值偏差增大。

表5 导弹姿态角计算结果Tab.5 Calculation results of attitude angle for missile
3.4 适用场合分析
平瞄方式测量原理与斜瞄方式相同,只是在初始位置上做了限制。平瞄是保持两个交会测量系统俯仰角为0°,即光轴保持水平状态,测量传感器像平面与水平面保持垂直,没有俯仰调节环节。斜瞄方式俯仰轴和方位轴都不固定,光轴可以以任意方向瞄准目标。
当高速摄像机焦距、口径、成像尺寸、像元尺寸等技术参数相同时,平瞄方式在垂直方向的视场要小于斜瞄方式,当测量垂直发射的导弹时,平瞄方式不如斜瞄方式使用方便。当测量倾斜发射的导弹时,平瞄方式和斜瞄方式使用方便性相当,平瞄由于不需要俯仰方向调节,高速摄像机的机械结构得到简化,研制成本有所降低。
4 结论
本文提出角平分线方向向量求解导弹中轴线俯仰角、方位角的方法,分析平瞄、斜瞄姿态测量方法导弹姿态测量精度,论述其适用性,并通过仿真典型导弹起飞姿态测量,对两种测量方法进行研究,结果表明:平瞄和斜瞄姿态测量方法,在给定的测量视场,测量误差在0.2°以内。同时采用两种仿真方法对测量精度进行相互验证,计算结果相近。
平瞄测量方法与斜瞄测量方法测量精度相近。斜瞄方式使用更便捷,通用性好。平瞄方式测量精度高,数据处理方法、机械结构相对简单,在适合的应用场合优势明显。此分析方法、分析结果为姿态测量方法选取、研究等方面提供一种可行的途径,也可为其它运动目标的近距离姿态测量提供借鉴。
[1] 赵建川,邵俊峰,王弟男,等.航母中线电视监视系统的设计[J].中国光学,2012,5(6):625-629.ZHAO J CH,SHAO J F,WANG D N,et al..Design of centerline television surveillance system for aircraft landing on carriers[J].Chinese Optics,2012,5(6):625-629.(in Chinese)
[2] 唐自力,马彩文,刘波,等.单站光测图像确定空间目标三维姿态[J].光子学报,2004,33(12):1480-1485.TANG Z L,MA C W,LIU B,et al..A approach of determination of objects 3D pose from mono-view[J].Acta Photonica Sinica,2004,33(12):1480-1485.(in Chinese)
[3] 高策,乔彦峰.光电经纬仪测量误差的实时修正[J].光学 精密工程,2007,15(6):846-851.GAO C,QIAO Y F.Real-time error-correct method for photoelectrical theodolite[J].Opt.Precision Eng.,2007,15(6):287-291.(in Chinese)
[4] 于起峰,孙祥一,陈国军.用光测图像确定空间目标俯仰角和偏航角的中轴线[J].国防科技大学学报,2000,22(2):15-19.YU Q F,SUN X Y,CHEN G J.A new method of measure the pitching and yaw of the axes symmetry object through the optical image[J].J.National University of Defense Technology,2000,22(2):15-19.(in Chinese)
[5] BORIS J,RICHARD G,KLAUS J.Stereo vision for small targets in IR images sequences[J].Signal and Data Process-ing of Small Targets,200l,4473:36I-370.
[6] 王宗友,付承毓,王芳.基于数据配准提高光电经纬仪的测量精度[J].中国光学与应用光学,2010,3(6):586-590.WANG Z Y,FU C Y,WANG F.Improvement of measuring precision forelectro-opticaltheodolite based on data matching[J].Chinese J.Optics and Applied Optics,2010 3(6):586-590.(in Chinese)
[7] 尚洋.基于视觉的空间目标位置姿态测量方法研究[D].长沙:国防科技大学,2006.SHANG Y.Researches on vision-based pose measurements for space targets[D].Changsha:National University of Defense Technology,2006.
[8] 王习文,马军,陈娟,等.飞机三维姿态测量的角平分线方向向量法[J].光学 精密工程,2010,18(2):369-376.WANG X W,MA J,CHEN J,et al..Direction vector method of angle bisector lines for measuring aircraft'S 3 D attitude[J].Opt.Precision Eng.,2010,18(2):369-376.(in Chinese)
[9] 罗宽,范蕾,高玉军,等.基于光测图像的空间目标的俯仰角和偏航角的测量技术[J].长春理工大学学报(自然科学版),2007,30(3):12-14.LUO K,FAN L,GAO Y J,et al..Measuring technology on elevation angle and yawing angle of space target based on optical measurement method[J].J.Changchun University of Science and Technology(Natural Science Edition).2007,30(3):12-14.(in Chinese)
[10] 高洪月.弹道导弹的弹道设计与仿真[D].哈尔滨:哈尔滨工业大学,2010.GAOH Y.Trajectory simulation and design of the ballistic missile[D].Harbin:Harbin Institute of Technology,2010.(in Chinese)
[11] 王超.提高回转体目标姿态测量精度的方法研究[D].成都:中国科学院光电技术研究所,2013.WANG CH.Study on methods to improve the attitude measurement precision of the rotary object[D].Chengdu:Institute of Optics and Electronics Chinese Academy of Sciences,2013.(in Chinese)
