天线方向图测试中的俯仰角定义与转台选择
2015-11-25杨先超
杨先超 任 超 王 凯 熊 函
(国营第七八三厂,四川 绵阳 621000)
天线用于辐射和接收无线电波,是雷达系统的重要组成部分。雷达系统的战术性能如探测距离、探测范围、测角(方位、俯仰)精度、角度分辨力和反干扰能力都与天线方向图特性有关,因此需要全面掌握天线的方向图特性。通常天线方向图的测试是在微波暗室或外场试验场进行的,不仅需要测试天线水平方向(俯仰角为0°时)的方向图,还需要测试其他俯仰角(俯仰角不为0°时)的方向图[1]。但天线安装平台的俯仰角定义不尽相同,有的以目标与天线水平面的夹角定义为俯仰角,有的以目标在天线垂直面的投影与水平面的夹角为俯仰角;同时常见的转台形式也有两种,有的水平轴在俯仰轴上方,有的水平轴在俯仰轴下方[2]。因此,根据俯仰角定义正确选择具有合适转台的测量环境进行测试,是正确获得天线方向图特性数据的保证。
1 俯仰角的定义
如图1所示,在三维坐标系中(X,Y,Z)中,坐标原点为O,X表示天线正前方,Y表示天线正上方,Z轴表示天线正右方。假定:直线OX和直线OZ所在的平面为水平面α,直线OX和直线OY所在的平面为垂直面β,直线OZ与垂直面β上的直线OA所在平面为斜面γ,以原点O为顶点,直线OY为轴线的某一圆锥侧面为圆锥面δ。
第一种俯仰角定义为坐标系中任意一点M到水平面α的夹角,即直线OM与水平面α的夹角。假定圆锥面δ上点M在水平面α上的投影为M1,φ1为直线OM和直线OM1之间夹角,那么φ1即为点M的俯仰角。由空间立体几何可推导出圆锥面δ上所有点的俯仰角均为φ1。
第二种俯仰角定义为坐标系中任意一点M投影到垂直面β后,投影点与水平面α的夹角为点M的俯仰角。假定斜面γ上点M在垂直面上的投影为M2,φ2为直线OX和直线OM2之间夹角,那么φ2即为点M的俯仰角。由空间立体几何可推导出投影点M2在直线OA上,直线OA上所有点与水平面α的夹角φ2为一固定值,因此斜面γ上所有点的俯仰角均为φ2。
2 转台的形式
转台通常由测试支架安装面、水平轴、俯仰轴组成,水平轴旋转范围为±180°,俯仰轴旋转范围为±60°,如图2所示。

图2 两种转台形式
第一种转台形式的水平旋转轴在俯仰旋转轴的上方,水平旋转轴的旋转轴心为a-b,当俯仰轴旋转一定角度后,水平旋转轴心会随着俯仰旋转轴的倾斜而发生偏转,如图2中a)所示。
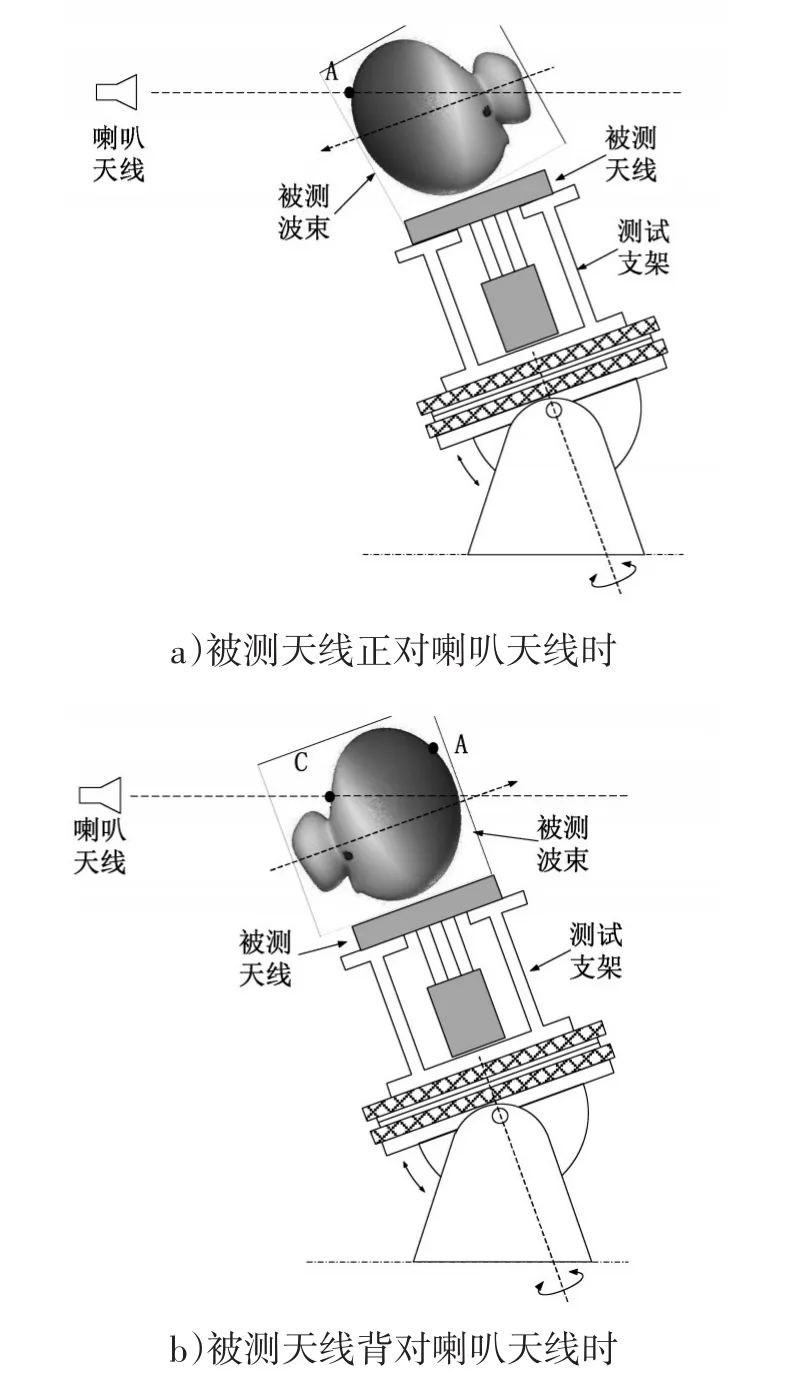
图3 使用第一种转台进行波束测试
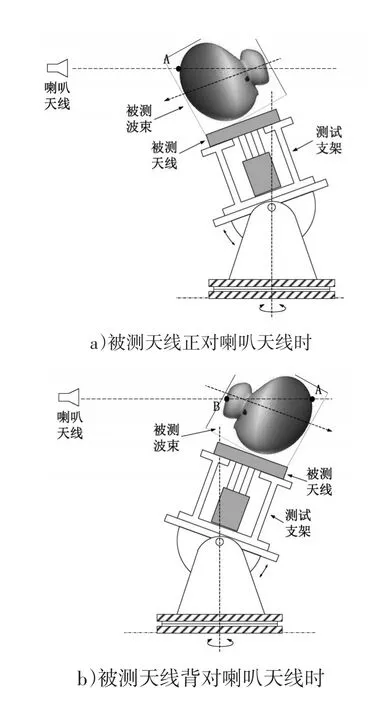
图4 使用第二种转台进行波束测试
第二种转台形式的水平旋转轴在俯仰旋转轴的下方,水平旋转轴的旋转轴心为c-d,无论俯仰旋转轴如何旋转,水平旋转轴心均固定不动,如图2中b)所示。
3 俯仰角和转台对应关系
当使用第一种转台进行天线方向图测试时,测试示意图如图3所示,图中被测天线通过测试支架安装在转台测试支架安装面上,为绘图清晰,将被测波束画于被测天线上方。转台俯仰轴前倾一定角度后,转动转台水平轴将被测天线正对喇叭天线,此时被测波束上A点正对喇叭天线,A点的幅度、相位数据被测试系统记录;转动转台水平轴至被测天线背对喇叭天线时,被测波束的C点正对喇叭天线,C点的幅度、相位被测试系统记录。在被测天线从正对喇叭天线转动至背对喇叭天线的过程中,被测波束上包含点A和点C的连线上所有点被记录,如图5中a)所示。
当使用第二种转台进行天线方向图测试时,测试示意图如图4所示。转台俯仰轴前倾一定角度后,转动转台水平轴将被测天线正对喇叭天线,此时被测波束上A点正对喇叭天线,A点的幅度、相位数据被测试系统记录;转动转台水平轴至被测天线背对喇叭天线时,被测波束的B点正对喇叭天线,B点的幅度、相位被测试系统记录。在被测天线从正对喇叭天线转动至背对喇叭天线的过程中,被测波束上包含点A和点B的连线上所有点被记录,如图5中b)所示。
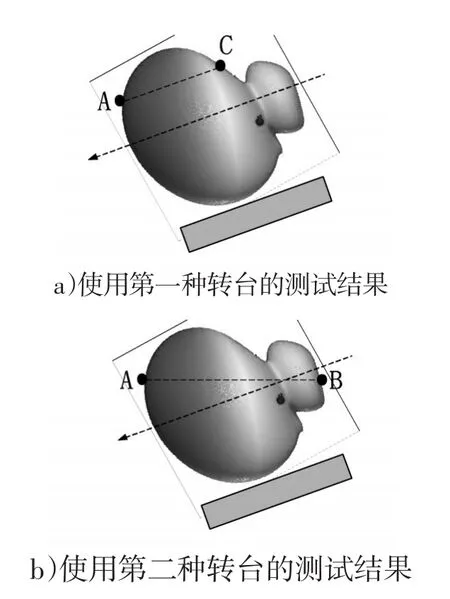
图5 两种转台测试结果对比
使用两种转台进行测试的测试结果对比如图5所示。使用第一种转台进行的天线方向图测试截面与天线水平面平行,若将该截面上所有点的测试条件定义为同一俯仰角,那么使用第一种转台进行的测试方式符合第一种俯仰角定义方式;使用第二种转台进行的方向图测试截面与天线水平面相交,若将该截面上所有点的测试条件定义为同一俯仰角,那么使用第二种转台进行的测试方式符合第二种俯仰角定义方式。
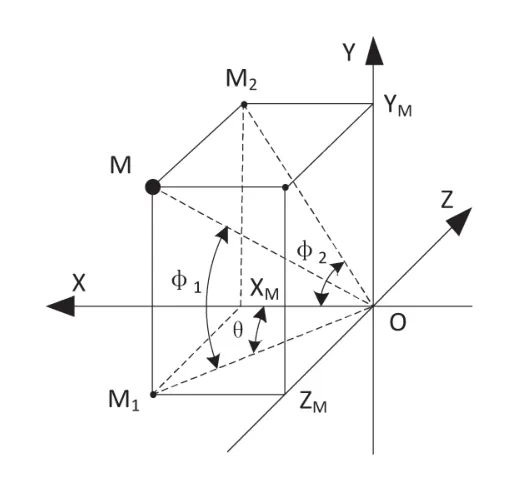
图6 两种俯仰角定义
4 两种俯仰角的转换
将图1中两种俯仰角定义合并到同一坐标系中,如图6所示。假定点M的坐标为(XM,YM,ZM),点O到点M的距离为LOM,点O到点M1的距离为LOM1,点O到点XM的距离为LOXM,点M到点M1的距离为LMM1,点M2到点XM的距离为LM2XM。直线OX和直线OM1之间的夹角为θ,夹角θ即为点M的方位角。
在雷达系统工作中,一般给定点M的方位角、俯仰角、距离以表示点M坐标系中的位置,即给定点M的位置信息为(θ,φ1,LOM)或(θ,φ2,LOM)。结合图6可得:
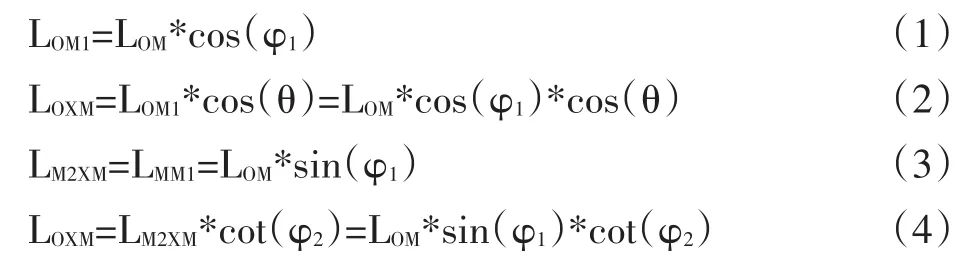
由式(2)和式(4)可得:

由式(6)可得俯仰角φ1和俯仰角φ2的转换关系:

5 结语
天线方向图特性数据是雷达系统的基础数据,是实现雷达系统战术性能的重要保证。通过对天线平台俯仰角定义和转台形式的分析,理清了天线方向图俯仰测试细节,避免了天线测试过程的盲目性。
[1]张军,刘衍,赵迎超.天线与转台之间的坐标关系[J].火控雷达技术,2007,36(1):30-32.
[2]周宏存.机载火控雷达中的坐标变换[J].现代雷达,2008,30(5):29-32,36.
