一种门把手外观无损检测系统的硬件设计
2015-11-25张森
张 森
(西南大学计算机与信息科学学院,重庆 400715)
随着计算机技术以及自动化技术的飞速发展,现代工业已经步入了一个高度机械化、自动化、智能化的新时代,工厂车间对于人的依赖性正在逐步地减少,先进的工业系统正在逐渐取代工厂中的工人。例如,以图像处理为核心的机器视觉技术在产品的外观检测中扮演中十分重要的角色,机器视觉因其检测速度快、精度高、噪声低、抗电磁干扰能力强、应用方便灵活且能够长时间持续工作等特点,逐渐取代了人在产品外观检测中的位置。工业应用[1-2]:基于机器视觉技术对相关的产品进行检测,有效地提高了产品的生产效率和产品质量。
本文研制的是一种门把手外观无损检测系统的硬件设计,重点在于检测门把手表面的划痕、污点、凹槽。然而由于光在物件表面的漫反射使得摄像头在某些角度下采集到的图像中并没有划痕、污点、凹槽等,这一现象对于细微的划痕而言尤为明显。因此,在固定摄像头和光源的情况下,为了实现对门把手的全方位检测,门把手必须能够实现自转,通过自转改变物件表面同一点的光的反射角度,使得摄像头最终能够接收到来自于物件表面同一点的反射光[3]。机器视觉在自动化生产中的应用[4],依据这一思想我们完成了能够实现流水线作业外观无损检测系统的硬件设计。
1 系统的硬件架构设计
整个系统主要由1条导轨、3个可移动机械手、3个行程开关组、4个工业摄像头以及2台24V同轴光源、3条传送带、3个电机组、2个物件检测平台以及若干支架等组成。

图1 系统硬件架构图
系统对于物件的检测流程是从最右边开始的,通过机械手1将被检物件夹住,经电机的驱动使得机械手1在导轨上从左向右运动,待其到达指定位置后便停止运动;同时检测平台1的夹手将被检物件夹住,之后机械手1释放被检物件并返回到右侧传送带处等待下一个被检物件。当检测平台1夹住被检物件之后,通过其底座内部的电机驱动转轴转动,从而带动底盘转动,使得被夹住的物件能够自转360°,与之同时,顶部和旁边的摄像头则对被检物件进行图像采集并将采集数据送入上位机进行运算处理,从而完成对被检物件上半部分的检测[5]。
待到物件的上半部分检测结束之后,机械手2则从检测平台1将被检物件取走,并将其送至检测平台2。检测平台2主要完成物件的下半部分检测,其检测过程以及系统硬件设备的运行状况与物件的上半部分检测过程基本一致,因此将不再进行赘述。当检测平台2结束对物件的下半部分检测之后,机械手3则从检测平台2上将被检物件移走,同时根据上位机所发出的信号完成对物件的分拣,待到分拣结束之后,机械手3则移回到初始位置等待下一个物件。整个系统以这种方式运行实现对物件的流水线检测。
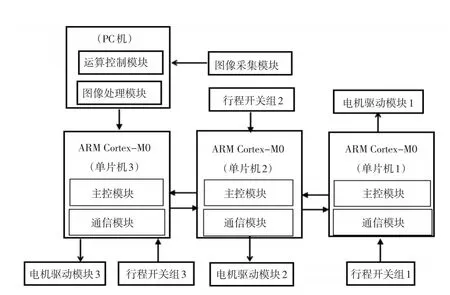
图2 系统控制单元结构图
2 系统控制单元设计
系统控制单元主要由图像采集模块、图像处理模块、电机驱动模块、单片机微处理器、通信模块、行程开关等构成。
2.1 图像采集模块
其作用是对被检物件进行全方位、全角度的图像采集,并将采集到的图像信息存储到硬盘中以待PC机对其进行运算处理。其主要是由4个PHC500H的工业相机和4个3MP0614C的工业镜头组合而成,和普通的摄像头相比,其在分辨率、帧率、对光线的要求、曝光方式等都有高可比性,其中主要部件为CCD感光芯片,采集到的图像清晰,无误能够很好地满足系统的性能要求。
2.2 图像处理模块
其作用是处理采集到的图像信息,并根据相关算法判断出被检物件是否达到标准要求,从而实现对被检物件的检测识别;同时根据物件的检测识别信号向下位机发出指令,对被检物件进行分拣。图像处理模块工作流程:首先通过图像的A/D转换将摄像头采集到的模拟信号转换为数字信号,然后将数字信号送入可编程阵列(CPLD),最终将CPLD处理后的信号送入CPU进行运算处理[6-7]。待到CPU运算处理结束之后,输出信号则通过USB通信口送出至下位机,再经过下位机的运算处理,驱动外围设备工作完成对物件的分拣。
2.3 单片机微处理器
其作用为对整个下位机系统的控制实现,对采集的信号以及单片机之间传送的数据信息进行运算处理。选用以ARM Cortex-M0为内核32位微控制器。其内核运行频率可达50MHZ,具有一个24位系统定时器,支持低功耗睡眠模式,同时嵌入向量中断控制器NVIC支持32个中断输入,每一个中断输入有4个优先级。硬件实现I2C,SPI接口,方便接存储器;它具12位逐次逼近式模式转换器ADC;由此可见,其功能强大、价格便宜,能够很好地满足控制要求。
2.4 电机驱动模块
其作用为对微控制器的输出信号进行转换、放大,从而实现对电机的驱动。L298N芯片具有驱动能力强、发热量低、抗干扰能力强的特点,因此本系统采用以L298N作为主驱动芯片的电机驱动模块。该模块不仅能够驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机,同时其使用的大容量电容、续流保护二极管很好地提高了系统的可靠性,能够满足系统的控制要求[8]。
2.5 通信模块
其作用主要体现在单片机与单片机之间或者单片机与上位机之间数据传送。通信模块有两组UART设备,具有可编程的波特率发生器,接收器和发生器都支持缓冲,均带有15bytes的FIFO缓冲,通信协议采用RS-232-C标准[9]。
2.6 行程开关
其主要作用为改变电路状态、控制电机运行,同时在本系统中其还起到了位置参考点的作用,用于确认机械手的运动位置。对于限位开关而言,当物体接近它时,开关的连杆驱动开关的节点引起闭合的节点分断或者断开的节点闭合,通过开关节点的开合状态控制电路和电机[10]。本系统使用的是型号为LXJM1-8108的行程开关,其良好的机械性能和上百万次的机械寿命能够满足系统的需求。
3 结语
本文研究的是一种门把手外观无损检测系统的硬件设计,事实上它也是一个自动化的外观检测线。其有效解决了光在物件表面因发生漫反射而产生的漏检问题,同时精巧的硬件系统设计使得本系统真正做到了对门把手的全方位、全角度、高效率的检测。
[1]韩九强.机器视觉技术与应用[M].北京:高等教育出版社,2009.
[2]查英,刘铁根,杜东.图像识别技术在零件装配自动识别中的应用[J].计算机工程,2006,32(10):178,185.
[3]张萍,朱政红.机器视觉技术及其在机械制造自动化中的应用[J].合肥工业大学学报(自然科学版),2007,30(10):1292-1295.
[4]王威.视觉检测系统及其在葡萄糖药液检测中的应用研究[D].长沙:湖南大学,2007.
[5]厉小飞.基于机器视觉的汽车零件缺陷检测技术研究[D].武汉:武汉理工大学,2012.
[6]卞晓东.基于机器视觉的车辆几何尺寸测量系统研究[D].南京:东南大学,2005.
[7]焦靖华.基于机器视觉的汽车组合仪表读数识别技术研究D].哈尔滨:哈尔滨工业大学,2010.
[8]沈伟,庞全,范影乐,等.基于机器视觉的全自动汽车零件筛选系统[J].仪表技术与传感器,2009(9):97-100.
[9]杨铁滨.基于机器视觉的陶瓷球表面缺陷自动检测技术研究[D].哈尔滨:哈尔滨工业大学,2007.
[10]吕佩举.基于单片机电动阀门控制系统设计[J].电子测量技术,2004(4):85-86.
