无缝内衣机纱线张力自整定PID 控制器设计
2015-11-18万中魁胡旭东彭来湖
万中魁,胡旭东,彭来湖
(浙江理工大学 教育部现代纺织装备技术工程研究中心,浙江 杭州 310018)
0 引言
无缝针织内衣机是一种集约化控制的机电一体化针织设备,专门用于编织高档无缝全成形针织内衣产品[1]。为了保证无缝内衣产品的弹性和舒适度,针织材料多采用高弹性纱线。弹性纱线输送过程中,张力的变化直接影响编织成圈的均匀和整齐。所以,实现弹性纱线的恒张力输送,是无缝内衣机准确成圈的关键。可靠稳定的恒张力输纱控制系统能大大提升无缝内衣机的编织效率和产品质量。
该设计通过对编织成圈过程中纱线张力变化进行研究,提出一种基于CAN 总线通讯和模糊规则自整定PID 方法的控制器,以解决无缝内衣机织造时的纱线张力实时变化和现有控制器抗干扰能力差、纱线张力控制精度低的问题。
本研究从总体设计、硬件设计和软件设计3个方面进行阐述,并通过仿真测试,验证方案的可行性。
1 总体设计概述
无缝内衣机中弹性纱线从纱架上的纱筒外圈绕下,穿过断纱报警器的过孔,进入恒张力输纱装置后,经过编织成圈机构的成圈编织,形成无缝产品[2]。该设计是针对在输纱过程中,对纱线张力进行实时检测,运用模糊自整定的PID 控制方法,减小实际测量值与设定值之间的误差,调整直流电机转速,实现张力的恒定。
控制系统的结构图如图1 所示,主要包括主控模块、恒张力控制模块和断纱报警模块。①主控模块采用32 位Cortex-M4 内核的ARM 芯片STM32F407 作为控制核心,最高工作频率达168 MHz,芯片内资源丰富,含6 路UART和2 路CAN 控制器,最多提供140个I/O口。②恒张力控制模块中主要包括与主控模块通讯的DSP 芯片、驱动直流电机的驱动电路和张力检测模块。主控模块与恒张力模块之间通过CAN 总线通讯,主控模块发送指令到恒张力控制模块,实现张力设置和张力大小调节;恒张力控制模块反馈当前张力值,并在张力变化过大时发出停止指令。③断纱报警模块由断纱信号采集电路和断纱报警器组成,能够检测输纱过程中是否出现断纱现象,一旦发生断纱,则向主控模块发出报警信号,主控模块向恒张力控制模块发送停机指令,直流电机停止转动。

图1 控制系统结构图
2 硬件电路设计
2.1 纱线张力检测模块设计
2.1.1 纱线张力检测原理
张力检测机构简图如图2 所示。纱线张力的检测,采用应变电阻传感器[3]。应变电阻片在受到拉力或压力时会产生阻值变化,图2 中:纱线2 在牵引力下向上贴紧基座1,导致基座1 受力发生形变,应变电阻片a3 受到压力作用,应变电阻片b4 受到拉力作用,不同的纱线张力产生的形变不同,所以应变电阻片的阻值不同。
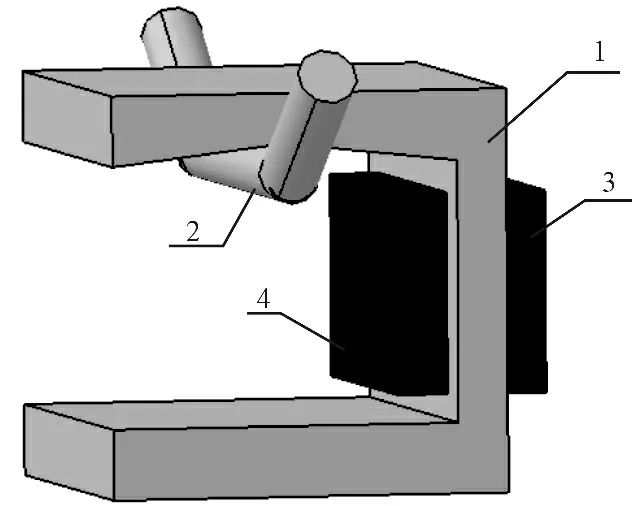
图2 张力检测机构简图
2.1.2 纱线张力检测模块电路设计
张力检测模块电路原理图如图3 所示。本研究通过桥式检测电路将阻值变化转换为电压变化,经过差分放大电路将电压值放大到ADC 模块的电压采集范围内[4],ADC 模块将采集到的电压信号转换为数字信号,由DSP 进行处理。桥式检测电路中,两个电阻应变片为R1和R2,分别受到拉力和压力,RV1 为调零电阻,R5为限流电阻,起保护电路的作用。当纱线状态稳定时,R1、R2阻值稳定,调节RV1 使得电桥平衡,输出电压为0 V。当纱线张力变化时,引起R1、R2阻值的变化,从而导致输出电压的变化,根据压力的变化得到纱线张力的变化情况。信号放大电路采用AD620B,该运放主要用于微弱信号的放大,增益范围为1~10 000。AD705为电路提供模拟电压,并为AD620B 提供模拟地。
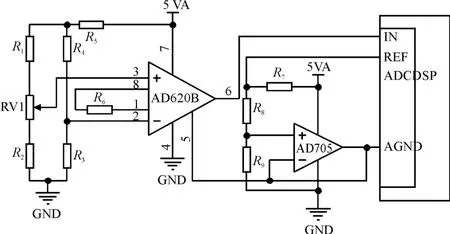
图3 张力检测模块电路
2.2 直流电机驱动电路
直流电机驱动电路如图4 所示。电机采用无刷直流电机,通过无刷直流电机控制器专用芯片MC33035驱动,芯片内部含有逻辑转换电路,能够直接将霍尔传感器的信号转换为驱动信号。同时,系统利用MC33039 闭环无刷直流电机适配器进行频率电压转换,将反馈电压反馈到MC33035 的反相输入端,构成闭环速度可调系统。图4 中,端口SensorA、SenserB和SenserC 为电机转子霍尔传感器采集到的位置信号,端口A、B、C 为供给电机的三相交流信号。工作时,MC33035 根据电机转子位置信号,结合方向控制端、制动输入端、电流检测端等信号状态,产生逆变桥三相上、下桥臂开关器件的6 路控制信号分别为AB、BB、CB、At、Bt和Ct。AB、BB、CB 信号是脉宽调制PWM 信号,通过改变MC33035 的误差放大器同相输入端的电压可实现占空比的调节。6 路控制信号经过放大后,接逆变桥桥臂,产生供电机运转的三相方波交流电流信号。
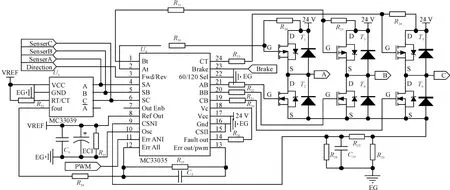
图4 直流电机驱动电路
2.3 CAN 总线接口电路设计
CAN 总线接口电路实现主控模块和恒张力控制模块之间的数据通讯,接口电路如图5 所示。该电路采用TJA1050 作为CAN 收发器[5],波特率最高可达1 Mbps,使用TLP113 高速光耦实现电源隔离,减少信号滞后,提高传输效率。图5 中:上拉电阻R12和R14可以提高CAN总线的传输速度,R11和R15为限流电阻,防止流进芯片和光耦的电流过大,终端电阻R10,可以消除通讯电缆中的信号反射,使收发器和电缆之间阻抗相匹配[6-8]。
2.4 断纱报警模块电路设计
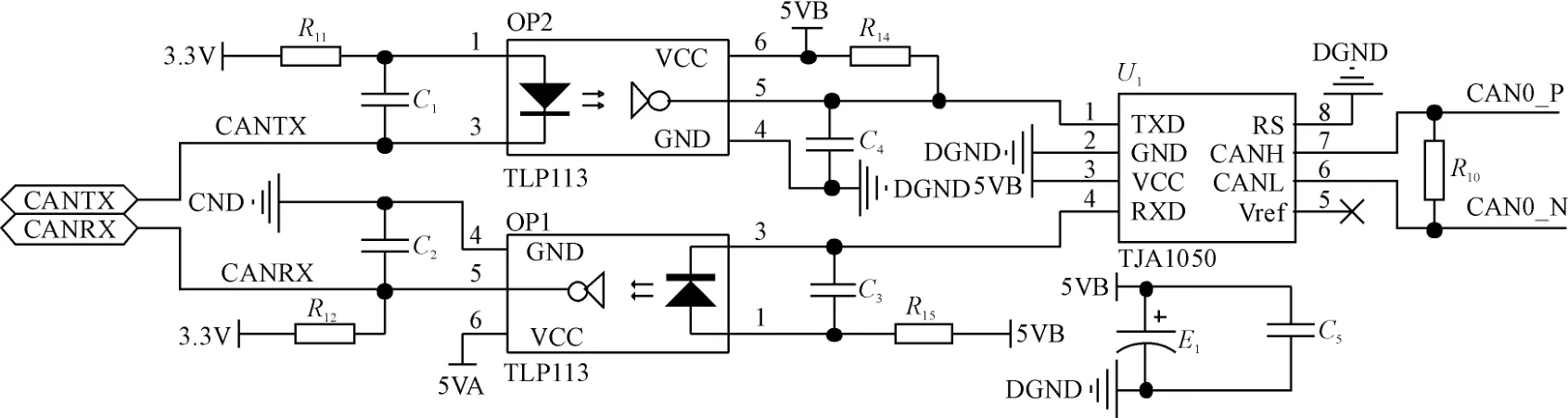
图5 CAN 总线接口电路

图6 断纱报警电路
断纱报警电路是为了当报警信号产生时,将断纱报警器产生的报警信号传输到DSP 中。断纱报警电路原理图如图6 所示。图6 中:MBR10100CT 为高压肖特基整流器,内部为两个共阴极二极管,发生报警时,断纱报警器A 中的开关闭合时,U2和U3 中二极管两端产生压差,二极管导通,12 V 经过两次二极管压降,是的X 点电位为10.6 V 左右,PNP 型三极管Q1的VEB=12 V-10.6 V=1.4 V >0,使得Q1工作在饱和区[9],从而使得光耦OP3 中发光二级管导通,ALARM信号发生“1”到“0”的跳变。当没有报警时,X 点电位为12 V,Q1工作在截止区,光耦中发光二级管截止,ALARM信号为“1”。
3 软件设计
3.1 主控模块软件设计
主控模块程序流程图如图7 所示。CAN 发送命令通过CAN 总线发送到恒张力控制模块,CAN接收中断接收来自恒张力控制模块反馈来的当前张力值。当断纱报警器报警或当前值偏离设定值过大,由主控模块发送停机指令。若张力系数更改,系统配置张力系数后,发送调节张力系数指令。
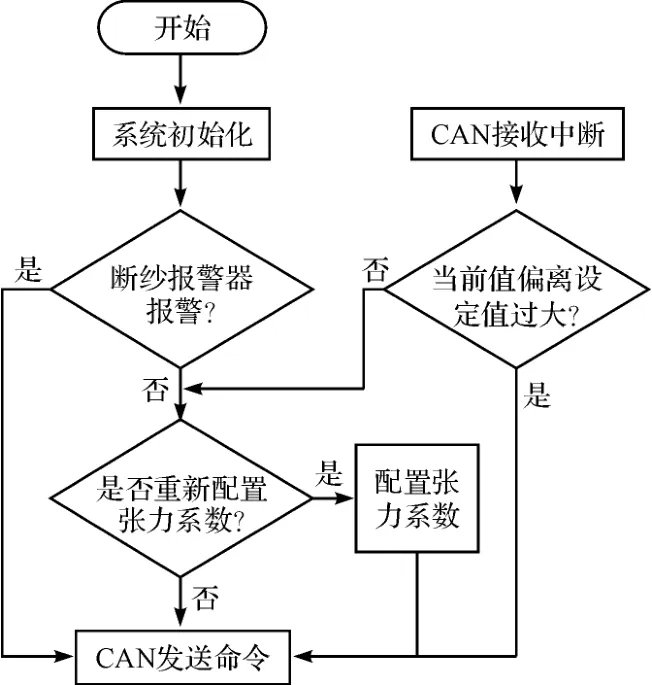
图7 主控模块程序流程图
3.2 恒张力控制模块软件设计
恒张力控制模块程序流程图如图8 所示。系统在CAN接收中断中接收来自主控模块的指令,进行命令解析,如果收到断纱报警或张力偏离过大指令,则关闭直流电机,停止输送纱线。如果收到张力系数调节指令,则通过改变电机转速,调整纱线张力与设定值相符。在纱线传输过程中,通过张力检测模块中实时检测到的张力值,与主控模块发送过来的张力系数进行对比,改变直流电机转速,使测量值与设定值尽可能接近,且将测量到的当前张力值反馈给主控模块。
3.3 恒张力模糊自整定PID 算法的实现
3.3.1 恒张力模糊自整定PID 控制原理
模糊自整定PID 属于一种智能PID 控制,根据误差e和误差的变化ec 来自动调节PID 的参数。这种控制方法利用模糊规则,找出PID 中比例系数kp、积分系数ki、微分系数kd与e和ec 间的模糊关系,实时地对3个参数进行修改,以满足不同的输入对控制参数的要求[10-11]。模糊自整定PID 控制原理框图如图9 所示。
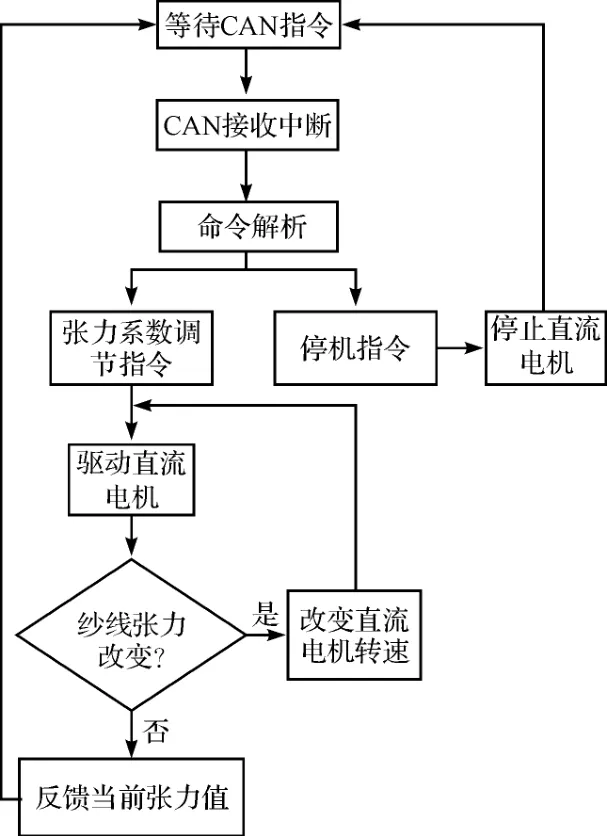
图8 恒张力控制模块程序流程图
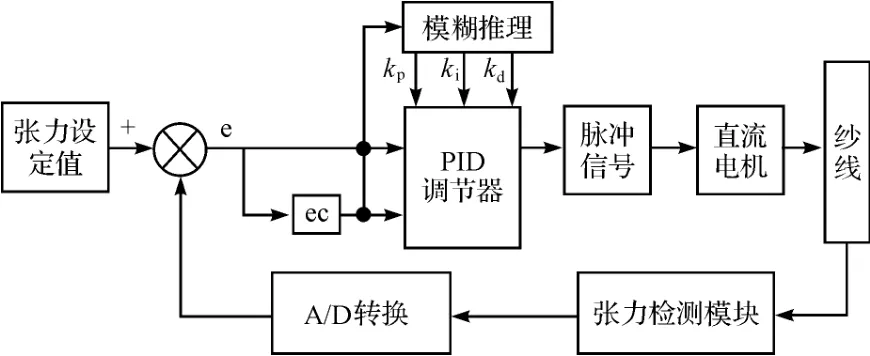
图9 模糊自整定PID 控制原理框图
该设计中模糊自整定PID 算法由恒张力控制模块中的DSP 实现,通过桥式电路采集应变电阻传感器上的电压变化,经放大后,由DSP 中的ADC 模块转换为数字信号,并换算成对应的张力值。将检测到的张力值与所设定张力值进行比较,得到e和ec,DSP 中构建的模糊控制器根据两参数值进行模糊推理,得到新的kp、ki和kd,输入PID 调节器,调整直流电机转速,调节纱线供给快慢,从而改变纱线张力大小。
根据kp、ki、kd对系统性能的影响,并结合纱线张力的自身特性,得到张力模糊控制推理规则。张力调节过程中,先保持kp大小适中、ki稍小、kd稍大,这样既能使系统有一定响应速度,又能避免引起过分微分饱和;然后逐渐加大kp和ki,提高响应速度,减少稳态误差,kd保持不变;当张力逐渐稳定后,减小kp,降低响应速度,逐渐加大ki并减小kd,维持系统稳定,避免系统振荡。
3.3.2 恒张力模糊自整定PID 算法
模糊控制器采用模糊推理中常用的CRI 算法,将语言变量的论域从连续域转换成有限整数的离散论域[12]。该设计中,笔者采用三角隶属函数,语言变量在量化域中取值均为{NB,NM,NS,Z,PS,PM,PB},分别为负大、负中、负小、零、正小、正中和正大。依据上述模糊规则,本研究建立的Δkp、Δki、Δkd的模糊规则表如表1 所示。

表1 Δkp、Δki、Δkd的模糊规则表
下面运用重心法将模糊量清晰化,以比例系数kp为例,重心法计算公式如下:


4 仿真测试
根据所述控制系统,本研究在Simulink 下进行仿真,设置模糊参数的初值为0.3,相应阶跃响应曲线图如图10 所示。
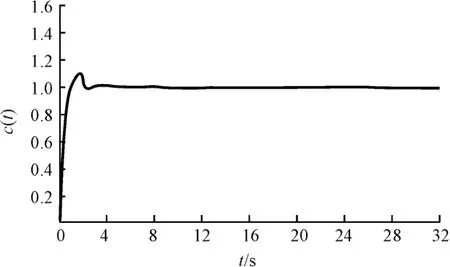
图10 模糊自整定PID 阶跃响应曲线图
由曲线图可知,系统的超调量δ=12%,响应时间t=1.6 s,表明该模糊自整定PID 控制系统的超调量较小、响应速度较快。
5 结束语
本研究通过对恒张力输纱控制系统的整体结构、硬件与软件设计进行分析,给出了一种基于CAN 总线通讯和模糊参数自整定PID 方法的控制器。该设计采用自整定PID 控制方法,针织过程中自动调整PID 参数,能够实现纱线的恒张力传输。恒张力模块与主控模块间采用CAN 总线通讯方式,增强抗干扰能力和系统稳定性。本研究通过Simulink 仿真验证了控制器的准确性。
研究结果表明,该控制器的超调量小、响应速度快,能够有效解决无缝内衣机中纱线张力的实时变化的问题,实现纱线的恒张力输送,具有良好应用前景。
[1]曹 斌.无缝针织内衣机成圈机构原理与工艺的研究与分析[D].杭州:浙江理工大学机械与自动控制学院,2010.
[2]陈 堃.无缝针织内衣机纱线智能输送系统的研究[D].武汉:武汉理工大学自控化学院,2010.
[3]张磊磊,张秋菊.纱线张力传感器弹性有限元分析及优化设计[J].工程设计学报,2007,14(5):392-394.
[4]李巧真,李 刚,韩钦泽.电阻应变片的实验与应用[J].实验室研究与探索,2011,30(4):34-137.
[5]胡旭东,黄肖华,彭来湖.内嵌驱动针织机械密度调节装置研制[J].纺织学报,2015,36(7):131-135.
[6]杜洪亮,张培仁,王 亮,等.CAN 总线远程传输可靠性的设计方法[J].电子技术,2009(3):1-3.
[7]樊郭秋,崔希君.基于CAN 总线的泥浆泵故障诊断研究[J].机械,2013(6):77-81.
[8]盘 龙,林光春,任德均,等.基于CAN 总线的设备监控系统设计[J].机电工程技术,2014(3):56-58.
[9]童诗白,华成英.模拟电子技术基础[M].4 版.北京:高等教育出版社,2006.
[10]王 强,王自胜.参数自学习PID 算法在电动负载模拟器中的应用[J].兵工自动化,2013(5):64-66,71.
[11]李 革,梅 靖,赵 匀.复贴机张力的模糊自整定PID控制[J].纺织学报,2006,27(6):41-43.
[12]于文凤,杜京义.自适应整定PID 在张力控制系统中的应用[J].工业控制与应用,2007,26(4):26-28.
[13]吕 俊.基于OPC 的PLC 在线PID 模糊自整定系统[J].轻工机械,2013,31(2):35-39.
[14]王 安,杨青青,闫文宇.模糊自整定PID 控制器的设计与仿真[J].计算机仿真,2012(12):224-228.
