双余度无刷直流电机控制系统的研究
2015-11-18曾凡桂曾庆和
曾凡桂,曾庆和
(1.哈尔滨工业大学 能源科学与工程学院,黑龙江 哈尔滨 150001;2.大庆钻探工程公司 钻技一公司,黑龙江 大庆 163358)
0 引言
永磁无刷直流电机以其高功率密度、高可靠性等优点广泛应用于对执行机构可靠性要求高的领域,如航空航天、风机、钻井等领域[1-2]。为了进一步提高其可靠性,在某些执行机构上广泛采用绕组冗余措施,因此研究人员设计出了双余度无刷直流电机[3]。近年来,关于双余度无刷直流电机的研究也比较多,主要集中在电机本体设计、双余度容错控制系统实现以及电机驱动控制系统,如电流和转矩均衡等方面[4-8]。考虑到双余度无刷直流电机的结构特点,两套绕组之间具有强耦合特性,若对电机的两套绕组采用开环控制,系统的动态性能和静态性能都将很差,这将导致电机转矩波动较大,影响控制系统的性能和电机寿命[9]。因此研究双绕组无刷直流电机的闭环控制具有一定意义。
本研究介绍双余度无刷直流电机的基本结构及其控制原理,说明电机的几种运行模式;并根据电机的电压平衡方程和机械运动方程建立电机的数学模型;在Matlab/Simulink 的仿真环境下对双余度无刷直流电机的两种备份方式进行仿真,同时搭建转速电流双闭环控制系统,并进行仿真和实验验证。
1 双余度无刷直流电机的数学模型
笔者研究的双余度无刷直流电机,气隙磁场呈近似为120°平顶的梯形波,定子槽中放置两套绕组。两套绕组星型连接,电气上完全独立,互差30°电角度,共用一个永磁体转子,有两套独立的霍尔位置传感器,采用两套独立的功率电子器件构成的三相桥式电路驱动。其控制系统的电气结构示意图如图1 所示。
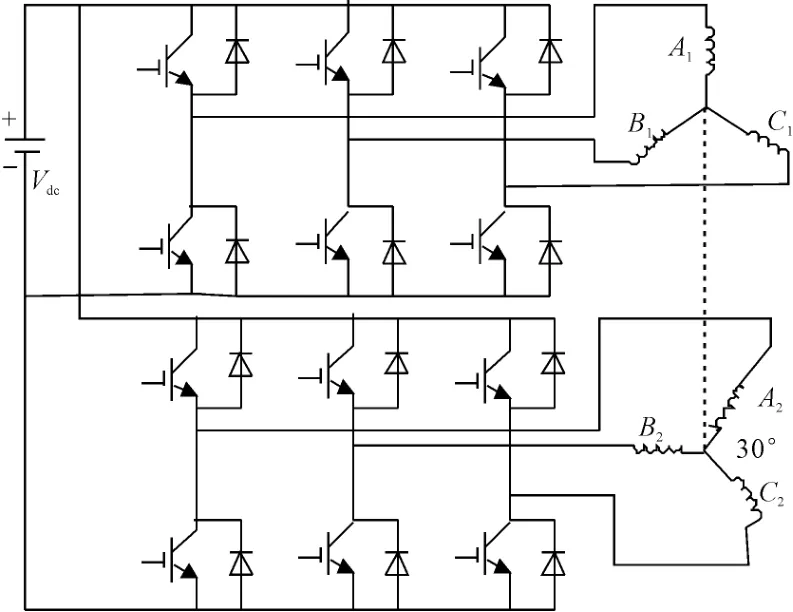
图1 控制系统的电气结构示意图
根据之前的研究,为了建立双余度无刷直流电机的数学模型,笔者假设每套三相绕组完全对称,功率开关器件为理想元件,不考虑磁路饱和,忽略电机磁滞损耗和涡流损耗,以及齿槽效应,得到双余度无刷直流电机的电压平衡方程:

式中:Us—电机两套绕组上的相电压矢量,Is—定子相电流矢量,Ea—相反电势矢量。
Us,Is,Ea分别为:
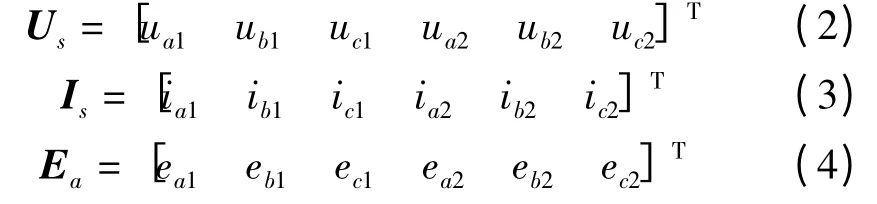
电阻矩阵Rs=rI6×6。
式中:r—相电阻,I6×6—单位矩阵。
电感系数矩阵Ls为:

式中:la—相绕组自感;m30,m120,m150,m240,m270—相差30°、120°、150°、240°和270°的两相绕组间互感,假设m 为两相绕组重合时互感,则m/2,m120=m240=-m/2,m270=0。
由于电机的两套绕组均采用星型连接,则有ia1+ib1+ic1=0,ia2+ib2+ic2=0。根据上述条件,将式(5)化简得到新的电感系数矩阵L's:

式中:La=la-m120=la+m/2。
双余度无刷直流电机的电磁转矩方程为:

机械运动方程为:

式中:Te—电磁转矩,TL—负载转矩,J—电机转动惯量,B—粘滞摩擦系数,Ω—转子机械角速度。
对速度进行积分运算可以得到转子机械位置表达式:

通常在电机控制时更关心的是转子的电气位置,其表达式为:

式中:p—电机的极对数。
2 双余度无刷直流电机控制系统仿真模型的建立
双余度无刷直流电机控制系统采用模块化的思想,将整个系统分解为多个功能独立的子模块。主要包括双余度无刷直流电机本体模块、功率驱动及换相模块、双闭环调节模块等。本研究利用Matlab/Simulink 对各个子模块进行建模,再将子模块结合起来,构建出双余度无刷直流电机转速电流双闭环控制系统仿真模型。
2.1 电机本体模块
双余度无刷直流电机的电机本体模型主要可以分为电压平衡方程子模块、转矩与机械运动方程子模块、反电动势子模块以及霍尔位置信号子模块等[10]。
根据上述电压平衡方程以及转矩与机械运动方程,笔者构造出电压平衡方程子模块和转矩与机械运动方程子模块,分别如图2、图3 所示。
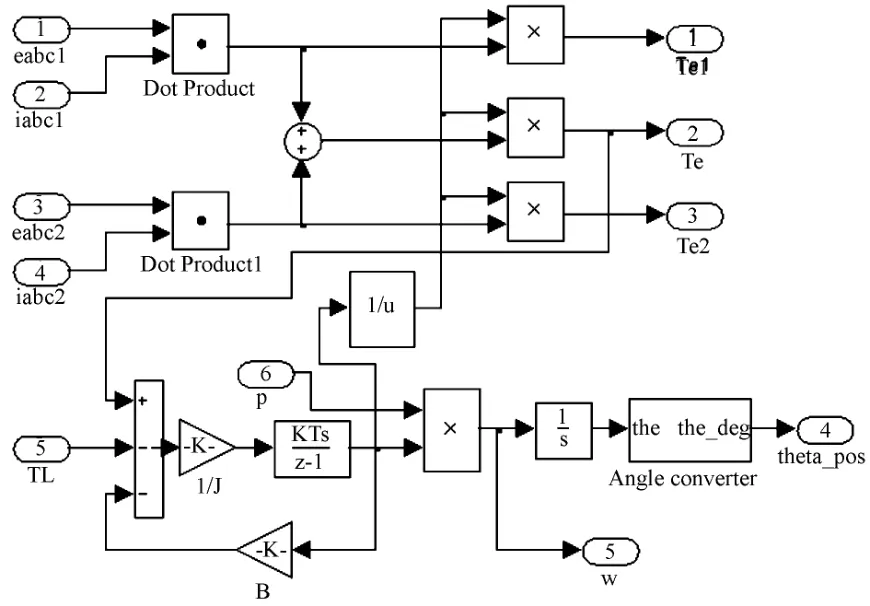
图3 转矩和机械运动方程子模块
电机反电动势模型的建立有很多方法,比如二维有限元时步法、分段线性法、正弦波削顶法和傅里叶变换法等。本研究采用傅里叶变换法,在电机设计过程中,利用有限元仿真软件,可以发现在梯形波反电势无刷直流电机中反电势并不是理想的梯形波,而是在正弦波的基础上叠加了部分三次谐波,使波峰出现部分平顶,因此为了获得更加接近实际的反电势波形,同时实现简单,采用傅里叶变换法。根据电机转速和位置信号,计算出反电势基波和三次谐波分量,将二者叠加近似于梯形波的反电动势波形,反电动势的表达式为:
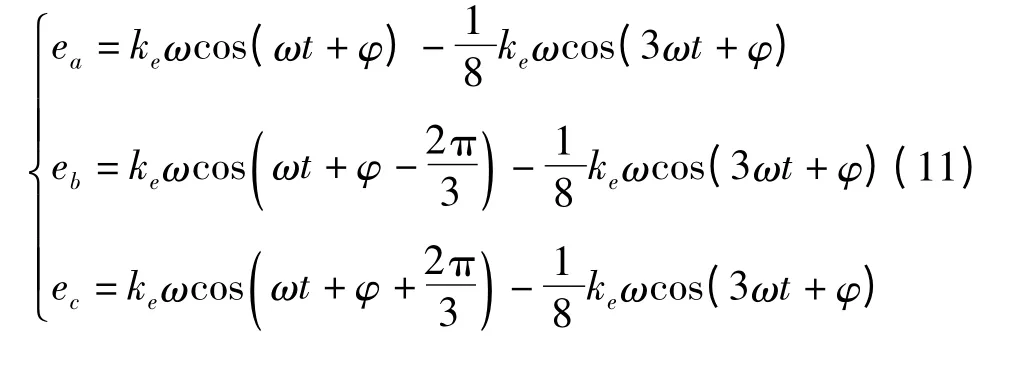
式中:ke—反电势系数,ω—电角速度,φ—初相。
霍尔位置信号子模块的仿真模型比较简单,笔者根据电磁转矩和机械运动仿真模块产生的位置信号,利用逻辑表达式将其转化成不同的逻辑值,得到的三路霍尔位置信号。
2.2 功率驱动及换相模块
电机采用两套由功率开关器件所组成的三相桥式电路进行驱动。对功率驱动模块的建模,本研究采用Matlab/Simulink 里自带的桥式电路模型Universal Bridge,同时选择功率MOSFET 作为开关器件[11-12]。
电机的换相采用传统的三相六状态驱动方式,将电机本体模块输出的两路霍尔位置信号根据换相逻辑转化为互差30°的两组六路控制信号,用于驱动两组三相桥式电路。本研究所建立的具体的模型如图4所示。

图4 换相逻辑模块
2.3 电机转速电流双闭环控制模块
在上面仿真的基础上,该伺服系统采用转速电流双闭环控制方式,其中转速环为外环,电流环为内环。转速调节器采用PI 调节器,其输入为给定的电机转速,其输出作为电流环的参考值,电流环也采用PI 调节器,调节电流参考值与实际电流的稳态误差,最终电流环的输出决定了加在功率管上开关信号的占空比大小,以实现系统的闭环运行。仿真的控制系统原理框图如图5 所示。
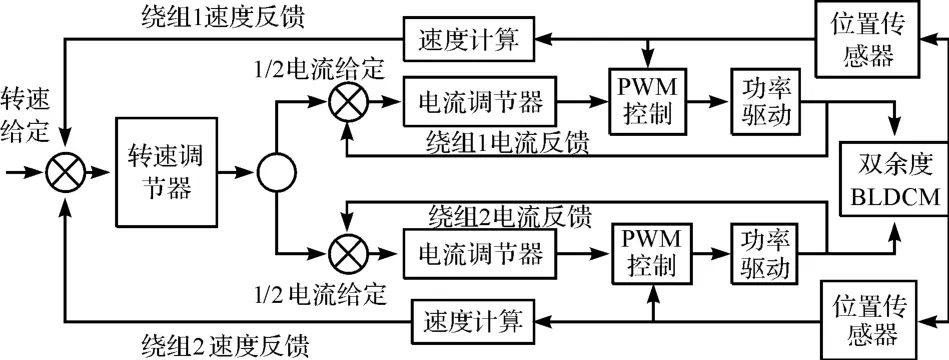
图5 双余度无刷直流电机系统原理框图
最终建立的双余度无刷直流电机双闭环伺服系统的仿真模型如图6 所示。
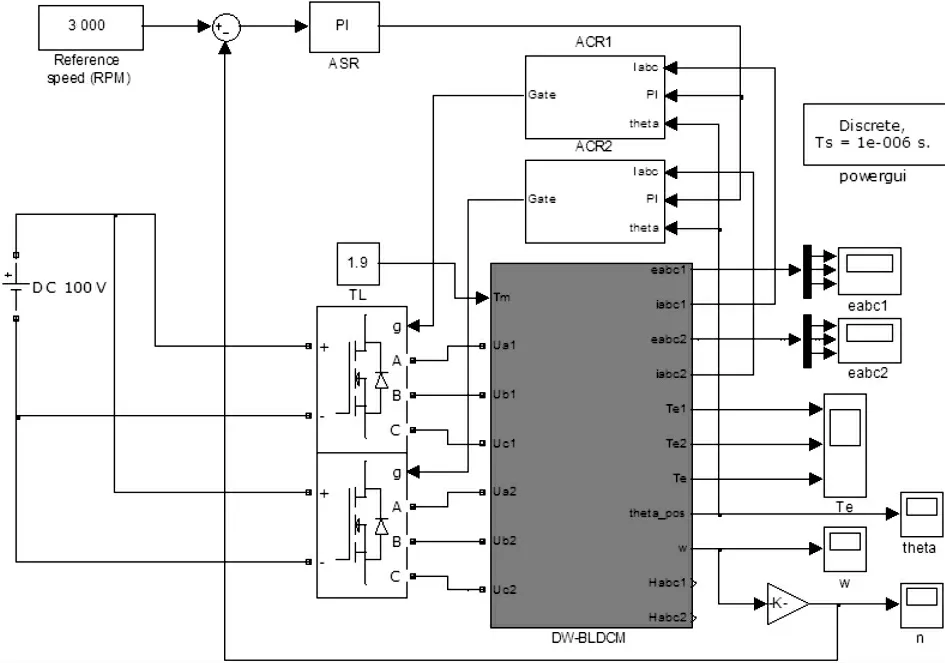
图6 双余度无刷直流电机伺服系统仿真模型
3 仿真结果与分析
根据上文建好的模型,本研究在Matlab/Simulink环境下对双余度电机控制系统进行仿真。首先设定电机参数为:两套绕组移30°电角度双Y 型连接,额定电压UN=100 V,额定负载TL=1.9 N·m,电机额定转速n=3 000 r/min,每相定子相电阻r=0.29 Ω,绕组自感为la=1.25 mH,转动惯量J=0.82 g·m2,粘滞摩擦系数为B=0.002 N·m·s,反电动势系数ke=0.039 8 V rad/s,电机极对数p=8。接下来对电机的几种不同工作模式进行仿真。
3.1 单通道运行模式
电机在正常运行时按照工作绕组数量分为单通道运行模式和双通道运行模式,其中单通道运行模式下与普通的无刷直流电机类似。仿真时设定电机带额定负载TL=1.9 N·m 启动,系统采用转速电流双闭环控制,得到输出转速n、A 相电流ia、每套绕组及总电磁转矩Te1、Te2、Te波形图,如图7 所示。
3.2 双通道运行模式
双通道运行模式时电机的两套绕组同时工作,保持上述仿真参数不变,得到输出转速n、A 相电流ia、每套绕组及总电磁转矩Te1、Te2、Te波形图如图8 所示。
4 实验结果与分析
双余度无刷直流电机伺服控制系统是由具有两套独立的霍尔位置传感器的双余度无刷直流电机本体及控制这两套绕组的两套独立三相H 桥逆变电路及其驱动电路构成,并根据故障信号实现两绕组的切换。
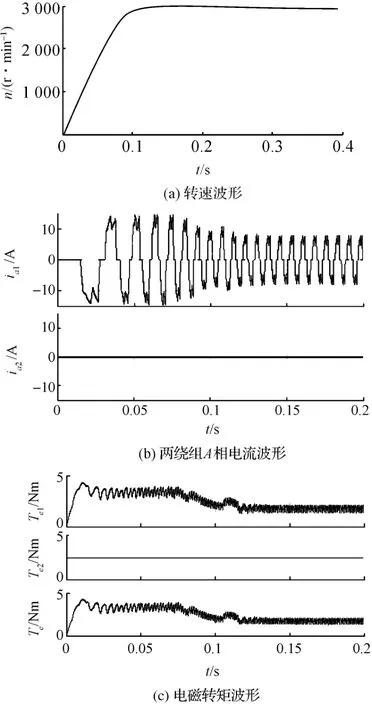
图7 单通道运行模式下仿真波形
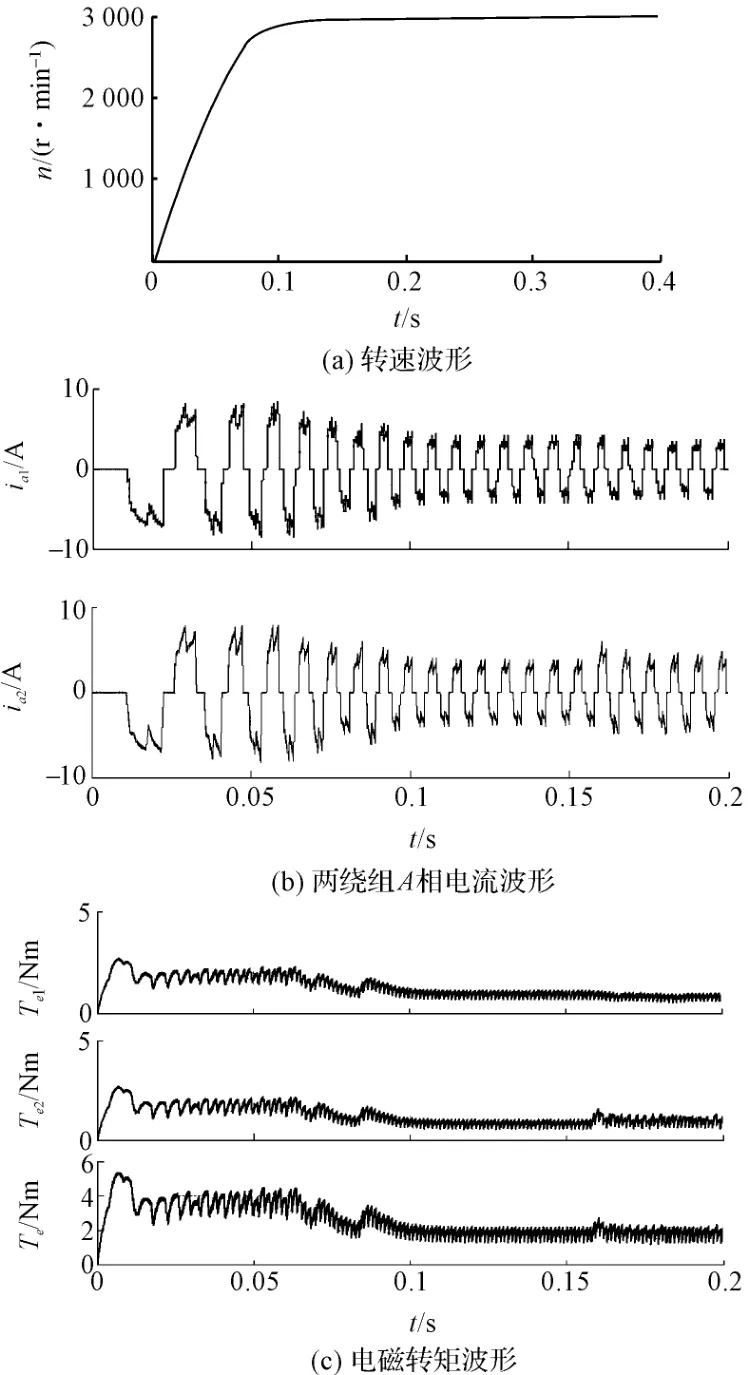
图8 双通道运行模式下仿真波形
该系统所用的控制器采用Microchip 公司生产的型号为dsPIC30F2010 的单片机。辅助电源电路采用MINMAX 公司的型号为MIHW2046 的电源模块,将直流母线电压转换成±12 V 电源,同时利用LM2575 将+12 V 再转换成+5 V,利用这三路电源给各种芯片供电。功率驱动电路采用集成芯片IR2130;功率逆变主电路为两个三相H 桥驱动电路,由IR 公司生产的信号为IRFP4668 的功率MOSFET 元件搭建。
电机由双通道运行切换到单通道运行时A 相两绕组的电流波形如图9 所示。从图9 中可以看出,电机两套绕组同时工作时两套绕组之间由于互感作用会产生电流干扰,两套绕组工作时的电流要小于只有一套绕组工作时的电流,所以电机的带载能力更强。在运行状态切换时,电机另一套绕组电流速度增大,很快达到稳定,转速并不发生变化,同时另一套绕组电流迅速降到几乎为零。
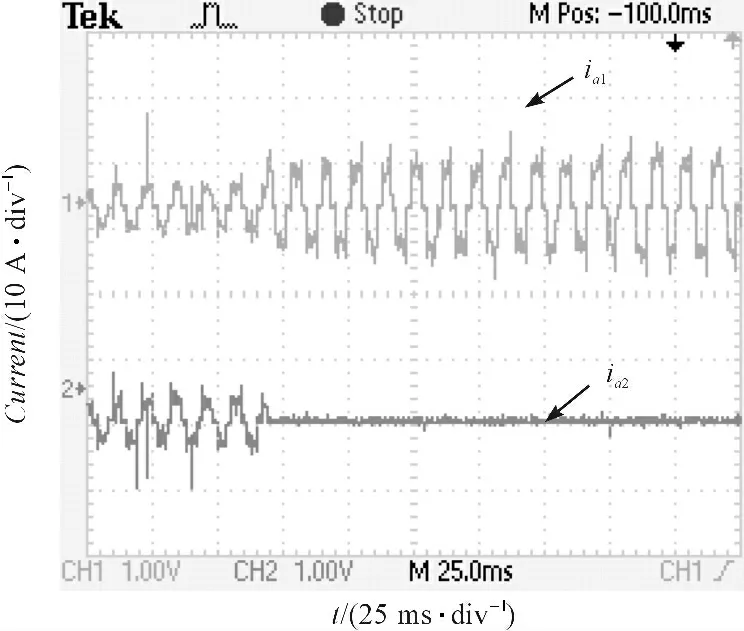
图9 运行状态切换时电机两绕组A 相电流实验波形
5 结束语
本研究简要介绍了双绕组无刷直流电机的基本结构及其控制原理,说明了电机的单通道和双通道运行模式,并根据电机的电压平衡方程和机械运动方程建立了电机的数学模型,然后在Matlab/Simulink 仿真环境下,详细介绍了各部分模型的建立,最后建立了双余度无刷直流电机的转速电流双闭环控制系统。
仿真和实验结果表明,在电机单通道运行时绕组相电流要大于在双通道运行时的绕组相电流,说明双通道运行时的带载能力更强。然而,由于双通道运行时电机两套绕组存在较强的耦合特性,此时绕组电流谐波较大。
研究结果还表明,通过采用双闭环的控制方式,电机的动态响应较快,并且稳态时电机的转速和转矩均比较平稳,故该控制策略改善了双余度无刷直流电机的伺服性能。
[1]YAONAN W,XIZHENG Z,XIAOFANG Y,et al.Positionsensorless hybrid sliding-mode control of electric vehicles with brushless DC motor[J].IEEE Transactions on Vehicular Technology,2011,60(2):421-432.
[2]LEE D H,AHN J W.A current ripple reduction of a highspeed miniature brushless direct current motor using instantaneous voltage control[J].IET on Electric Power Applications,2009,3(2):85-92.
[3]DIXON R,GIFFORD N,SEWELL C,et al.REACTS:reliable electrical actuation systems[J].IEE Colloquium on Electrical Machines and Systems for the More Electric Aircraft,1999,9(180):5/1-5/16.
[4]BENNETT J W,ATKINSON G J,MECROW B C,et al.Fault-tolerant design considerations and control strategies for aerospace drives[J].IEEE Transactions on Industrial Electronics,2012,59(5):2049-2058.
[5]苏文兵.双绕组无刷直流电动机电气故障及可靠性的研究[D].哈尔滨:哈尔滨工业大学电气工程及自动化学院,2012.
[6]周元钧.双绕组无刷直流电机的数学模型与转矩特性[J].电工技术学报,2004,19(4):13-14.
[7]林 辉,戴志勇,马冬麒.双余度舵系统中的电流均衡策略研究[J].微特电机,2012,40(4):10-15.
[8]袁珊珊.中小功率DC-DC 模块并联均流方案的优选及实现的研究[D].杭州:浙江大学电气工程学院,2006.
[9]付朝阳,刘景林,赵小鹏.双余度永磁无刷直流电机磁-热耦合分析[J].西北工业大学学报,2010,28(6):921-926.
[10]肖琳琳,付永领,齐海涛,等.航空大功率双绕组无刷直流电机的建模仿真[J].伺服控制,2009(10):27-31.
[11]廖志远,郭 杰.JT200 型卷纸筒机纸带张力的数学建模及PID 控制[J].包装与食品机械,2014,32(3):52-56.
[12]王国玲,李振宇,范自道.无刷直流电机自适应模糊PID控制系统[J].机电工程技术,2013(2):37-40.
